船用門式起重機(jī)動(dòng)載荷的確定方法
2013-10-14 11:00:48錢夏夷殷晨波馬峰
機(jī)械制造與自動(dòng)化 2013年4期
關(guān)鍵詞:模型
錢夏夷,殷晨波,馬峰
(1.江蘇省特種設(shè)備安全監(jiān)督檢驗(yàn)研究院,江蘇南京210003;2.南京工業(yè)大學(xué)機(jī)械與動(dòng)力工程學(xué)院,江蘇南京 211816)
0 引言
船用門式起重機(jī)(以下簡(jiǎn)稱船用門機(jī))在啟動(dòng)和制動(dòng)的過程中承受著強(qiáng)烈的沖擊振動(dòng)[1-2],這種振動(dòng)產(chǎn)生的動(dòng)載荷必須考慮。長(zhǎng)期以來,起重機(jī)設(shè)計(jì)大都將動(dòng)態(tài)問題簡(jiǎn)化為靜態(tài)問題處理,一些國(guó)家和國(guó)際起重機(jī)協(xié)會(huì)的起重機(jī)設(shè)計(jì)規(guī)范采用一個(gè)動(dòng)載系數(shù)來考慮這種動(dòng)載荷[3],雖然這樣可使問題簡(jiǎn)單化,但其缺陷是不能準(zhǔn)確地反映起重機(jī)的實(shí)際工況和動(dòng)態(tài)性能[4]。本文采用振動(dòng)理論分析法和虛擬樣機(jī)仿真法分析了300 t/43 mA型雙梁船用門機(jī)起升、小車運(yùn)行和大車運(yùn)行三大機(jī)構(gòu)聯(lián)合啟制動(dòng)下的動(dòng)力學(xué)問題,獲得了不同工況下隨時(shí)間變化的動(dòng)載荷。得到的最大動(dòng)載荷為船用門機(jī)動(dòng)態(tài)有限元分析提供了依據(jù)。
1 基于振動(dòng)理論的動(dòng)載荷確定方法
根據(jù)實(shí)際工況,將實(shí)際船用門機(jī)結(jié)構(gòu)進(jìn)行簡(jiǎn)化[5]。對(duì)于起升工況,建立了三質(zhì)量三自由度模型,對(duì)于小車運(yùn)行工況,建立了兩質(zhì)量?jī)勺杂啥饶P停瑢?duì)于大車運(yùn)行工況,建立了三質(zhì)量三自由度模型。
1.1 起升機(jī)構(gòu)動(dòng)力學(xué)模型及動(dòng)載荷
起升機(jī)構(gòu)的動(dòng)力學(xué)模型如圖1所示,圖中mq1為電動(dòng)機(jī)轉(zhuǎn)子和機(jī)構(gòu)中所有運(yùn)動(dòng)部分的推算質(zhì)量,mq2為吊重的推算質(zhì)量,它們用彈性件kq相連。起升機(jī)構(gòu)的驅(qū)動(dòng)裝置是裝在彈性基礎(chǔ)上(承載金屬結(jié)構(gòu))的,kq0為基礎(chǔ)的剛性,mq0為基礎(chǔ)的質(zhì)量,Q+f(t)為作用在質(zhì)量mq1上的激勵(lì)力。sq0,sq1,sq2分別表示質(zhì)量mq0,mq1,mq2的位移。
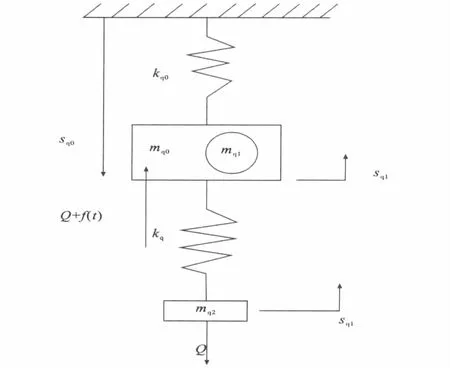
圖1 起升機(jī)構(gòu)啟制動(dòng)工況的動(dòng)力學(xué)模型
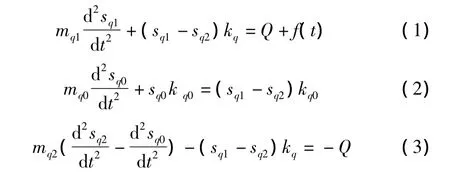
起升機(jī)構(gòu)啟動(dòng)時(shí),根據(jù)圖1的動(dòng)力學(xué)模型得到質(zhì)量mq0,mq1,mq2的運(yùn)動(dòng)微分方程:
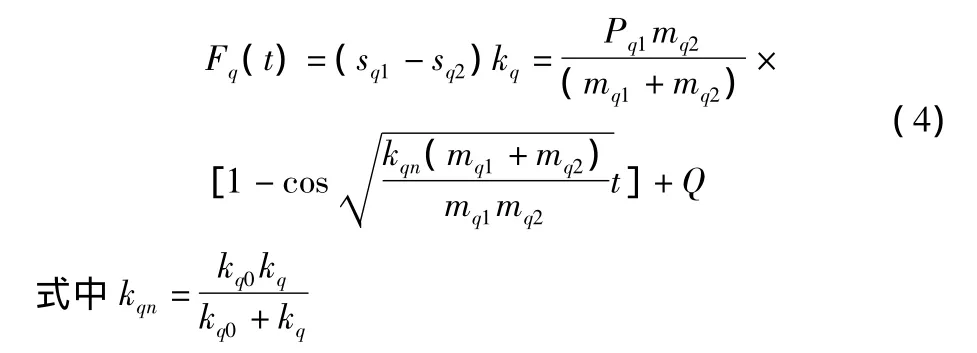
由于該加速力f(t)在起升機(jī)構(gòu)啟動(dòng)這段很短的時(shí)間內(nèi)隨時(shí)間的變化相對(duì)較慢,故可簡(jiǎn)化取f(t)≈Pq1=常數(shù)。
聯(lián)立式(1)、(2)、(3)經(jīng)推導(dǎo)得到鋼絲繩所受的彈力:
起升機(jī)構(gòu)制動(dòng)時(shí),根據(jù)圖1的動(dòng)力學(xué)模型得到質(zhì)量mq0,mq1,mq2的運(yùn)動(dòng)微分方程:
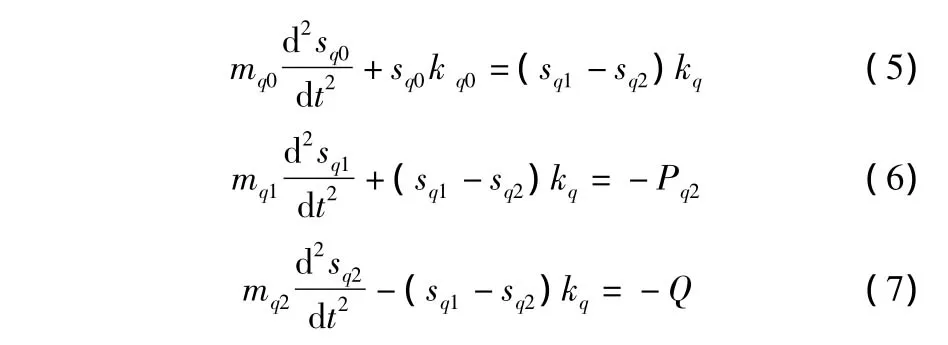
式中Pq2為制動(dòng)力。
聯(lián)立式(5)、(6)、(7)經(jīng)推導(dǎo)得到鋼絲繩所受的彈性張力:

1.2 小車運(yùn)行機(jī)構(gòu)動(dòng)力學(xué)模型及動(dòng)載荷
小車運(yùn)行機(jī)構(gòu)啟制動(dòng)時(shí)吊重的水平慣性力使懸吊貨物的鋼絲繩相對(duì)鉛垂線產(chǎn)生偏擺角,即引起吊重對(duì)鋼絲繩的動(dòng)載荷。
小車運(yùn)行機(jī)構(gòu)的動(dòng)力學(xué)模型如圖2所示,圖中mx0為起重小車的推算質(zhì)量,mx1為小車運(yùn)行機(jī)構(gòu)的推算質(zhì)量,mx2為吊重質(zhì)量,sx為在隨小車運(yùn)動(dòng)的坐標(biāo)系中吊重的擺幅,sx0為在瞬時(shí)t小車距離固定坐標(biāo)原點(diǎn)的距離,g為重力加速度,lx為吊重起升時(shí)鋼絲繩的長(zhǎng)度。
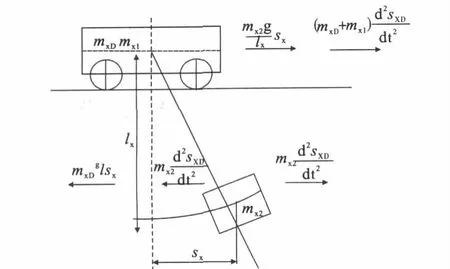
圖2 小車運(yùn)行機(jī)構(gòu)啟制動(dòng)工況的動(dòng)力學(xué)模型
根據(jù)圖2的動(dòng)力學(xué)模型得到吊重的運(yùn)動(dòng)微分方程:

同理取f(t)≈Px=常數(shù),
推導(dǎo)得到吊重的擺幅:
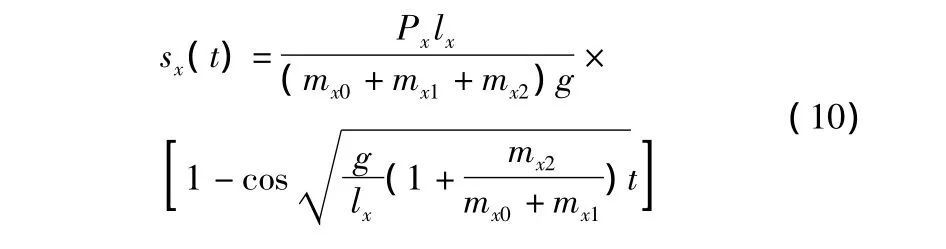
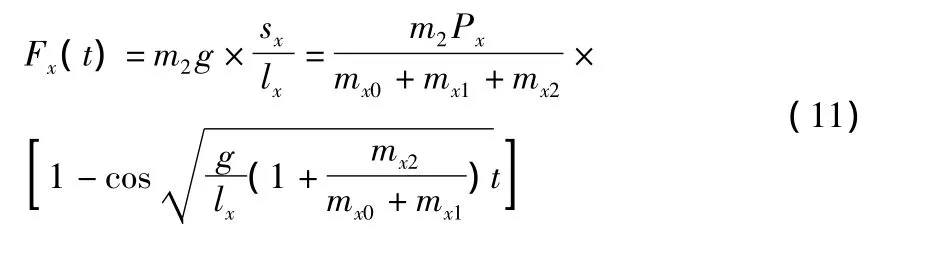
最后得到鋼絲繩的受力載荷:
1.3 大車運(yùn)行機(jī)構(gòu)動(dòng)力學(xué)模型及動(dòng)載荷
同小車運(yùn)行時(shí)相似,大車運(yùn)行機(jī)構(gòu)啟制動(dòng)時(shí)貨物的水平慣性力也會(huì)引起鋼絲繩的偏擺,從而引起吊重對(duì)鋼絲繩的動(dòng)載荷。
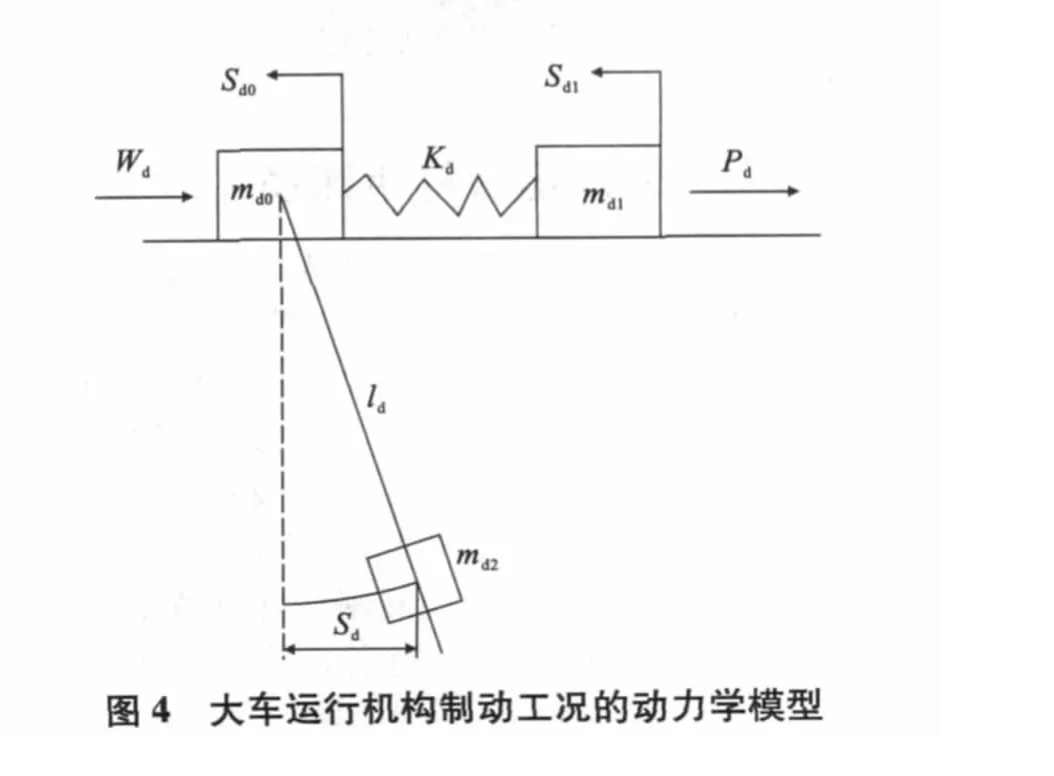
大車運(yùn)行機(jī)構(gòu)的動(dòng)力學(xué)模型如圖3、圖4所示,兩圖中md0為船用門機(jī)大車的推算質(zhì)量,md1為大車傳動(dòng)系統(tǒng)的推算質(zhì)量,md2為移動(dòng)的吊重質(zhì)量,sd0和sd1為質(zhì)量md0、md1的位移,sd為吊重對(duì)鉛垂線的偏距,g為重力加速度,ld為吊重起升時(shí)鋼絲繩的長(zhǎng)度,t表示時(shí)間,Pd和Wd表示推算的加速載荷力和起重機(jī)的運(yùn)行靜阻力,kd為起重機(jī)運(yùn)行機(jī)構(gòu)傳動(dòng)零件(主要是軸)的推算剛性。
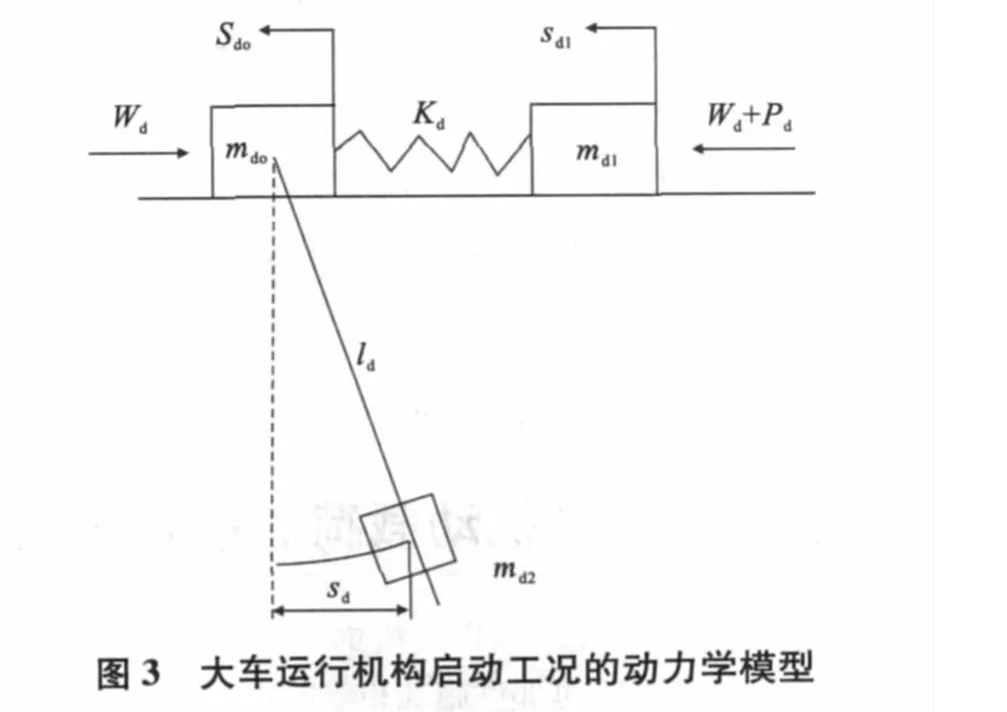
大車運(yùn)行機(jī)構(gòu)啟動(dòng)時(shí),根據(jù)圖3的動(dòng)力學(xué)模型得到質(zhì)量md0、md1運(yùn)動(dòng)微分方程:
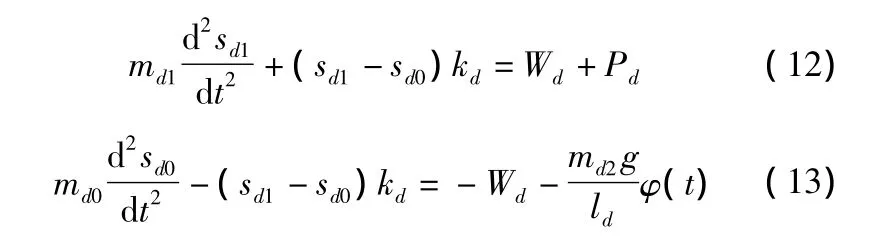
式中φ(t)為大車運(yùn)行機(jī)構(gòu)吊重的擺幅。
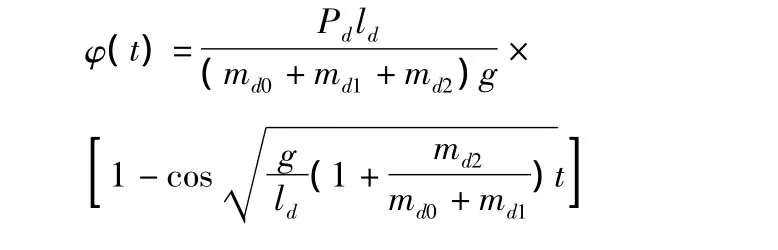
聯(lián)立式(12)、式(13)經(jīng)推導(dǎo)得到鋼絲繩的受力載荷:

式中頻率:

大車運(yùn)行機(jī)構(gòu)制動(dòng)時(shí),根據(jù)圖4制動(dòng)工況的動(dòng)力學(xué)模型得到質(zhì)量md0、md1的運(yùn)動(dòng)微分方程:
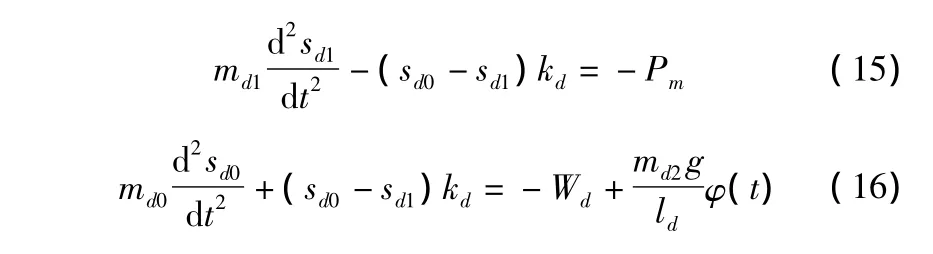
式中Pm為作用在質(zhì)量md1上的制動(dòng)力。
聯(lián)立式(15)、(16)經(jīng)推導(dǎo)得到鋼絲繩的受力載荷:
2 基于虛擬樣機(jī)動(dòng)載荷的確定方法
利用PRO/E建立了船用門機(jī)的三維實(shí)體模型,并將模型導(dǎo)入到ADAMS,對(duì)部件施加相應(yīng)的約束和載荷,建立起虛擬樣機(jī),實(shí)現(xiàn)了船用門機(jī)各機(jī)構(gòu)在不同工況下動(dòng)載荷隨時(shí)間變化過程的仿真模擬。
2.1 船用門機(jī)的虛擬樣機(jī)建模
以300 t/43 mA型雙梁船用門機(jī)為原型,按照設(shè)計(jì)圖樣建立了三維幾何模型,如圖5所示。模型由主梁、剛性支腿、柔性支腿、上小車、下小車、大車運(yùn)行機(jī)構(gòu)等組成。
根據(jù)船用門機(jī)各構(gòu)件間的連接約束關(guān)系,將主梁與剛性支腿、軌道和地面、支腿和主梁、柔性支腿下端和下橫梁、小車軌道與主梁以固定副約束,柔性支腿上端與主梁間以球鉸約束,卷筒和小車以旋轉(zhuǎn)副約束,大車和大車軌道以移動(dòng)副約束,將所有車輪和車體以旋轉(zhuǎn)副約束,對(duì)上下小車車輪與軌道施加接觸力。
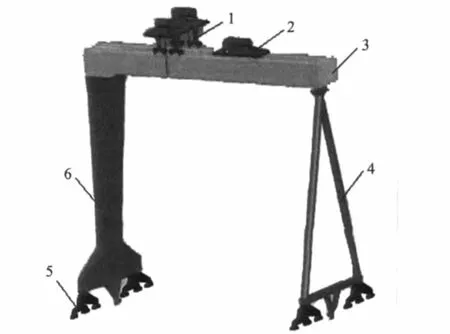
圖5 船用門機(jī)的三維幾何模型
在創(chuàng)建鋼絲繩時(shí),采用離散的方法,利用多段圓柱體通過襯套力(Bushing)連接來模擬鋼絲繩,并在鋼絲繩的每一個(gè)圓柱體與卷筒之間施加接觸力,實(shí)現(xiàn)鋼絲繩繞卷筒卷繞。
采用ADAMS的IF函數(shù)實(shí)現(xiàn)起升、小車和大車啟動(dòng)載荷和制動(dòng)載荷的施加,在仿真中給各剛體施加重力載荷,并考慮風(fēng)載對(duì)吊重的影響。
采用IF函數(shù)對(duì)卷筒和小車的轉(zhuǎn)動(dòng)副、小車與主梁軌道的移動(dòng)副和大車與整機(jī)運(yùn)行軌道的移動(dòng)副上施加驅(qū)動(dòng)。
最后生成的起重機(jī)整機(jī)虛擬樣機(jī)模型如圖6所示。
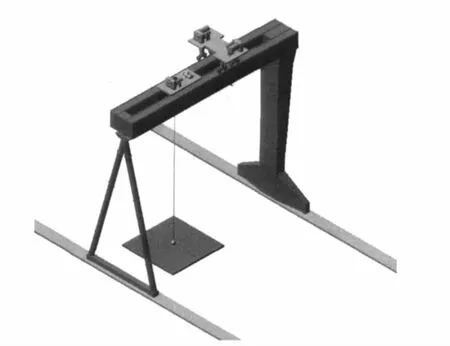
圖6 船用門機(jī)的虛擬樣機(jī)模型
2.2 典型工況下動(dòng)載荷的確定方法
根據(jù)船用門機(jī)技術(shù)性能參數(shù)表計(jì)算得到,起升機(jī)構(gòu)的啟制動(dòng)時(shí)間分別為5.28 s和2.89 s,勻速運(yùn)行的時(shí)間為24.33 s;小車運(yùn)行機(jī)構(gòu)的啟制動(dòng)時(shí)間分別為3.63 s和2 s,勻速運(yùn)行的時(shí)間為26.87 s;大車運(yùn)行機(jī)構(gòu)的啟制動(dòng)時(shí)間分別為 4.98 s和 4.56 s,勻速運(yùn)行的時(shí)間為 7.46 s。利用虛擬樣機(jī)仿真法進(jìn)行三大機(jī)構(gòu)的聯(lián)合啟制動(dòng)下的動(dòng)力學(xué)仿真,得到典型工況下隨時(shí)間變化的鋼絲繩的動(dòng)載荷,如圖7所示。
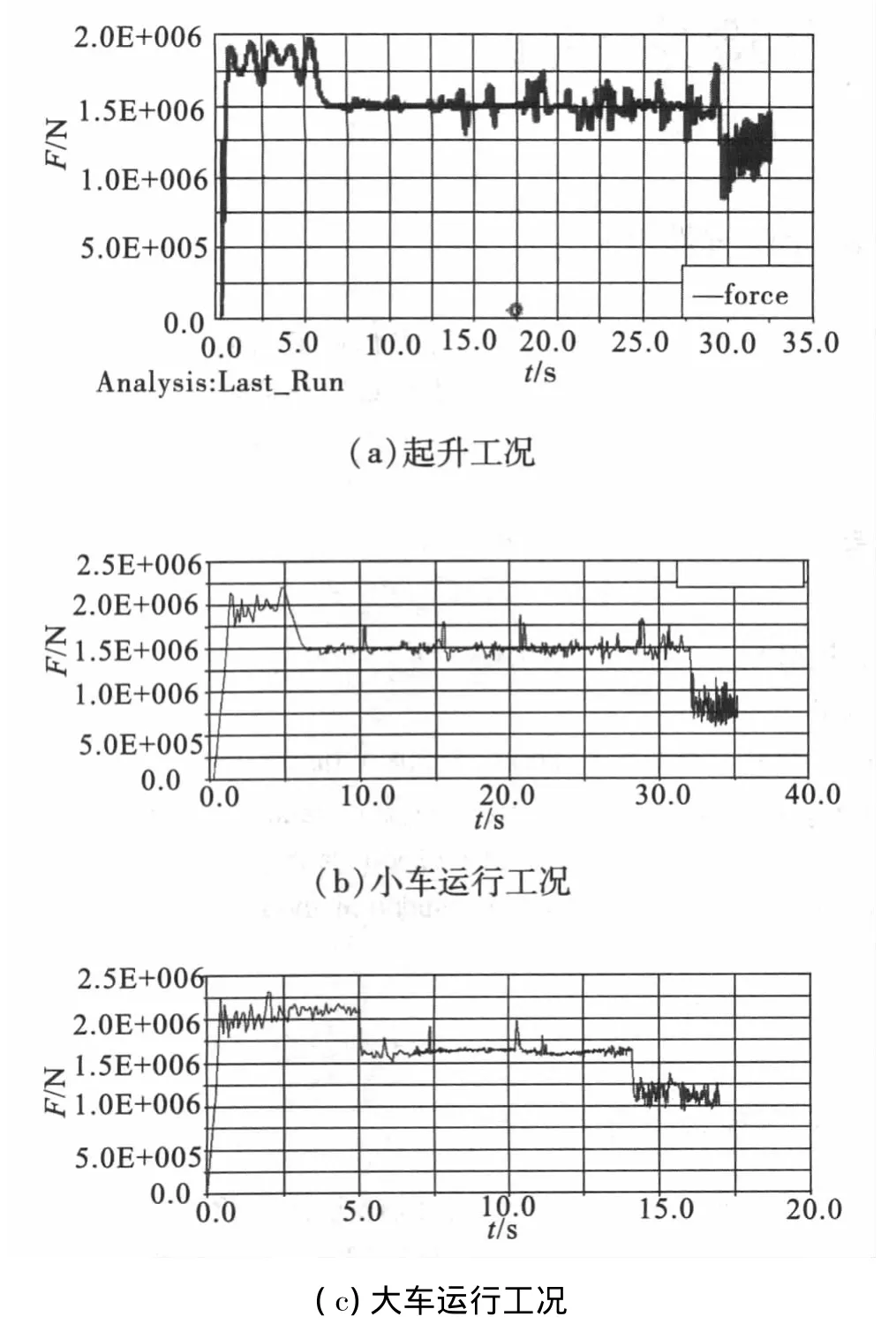
圖7 鋼絲繩張力曲線
對(duì)于起升工況,如圖7(a)所示:0-5.28 s為起升機(jī)構(gòu)啟動(dòng)階段,此時(shí)吊重加速上升,平均載荷力要比實(shí)際吊重大;5.28-29.61 s為勻速運(yùn)行階段,載荷力等于吊重自重;29.61—32.5 s為起升機(jī)構(gòu)制動(dòng)階段,平均載荷力變小。
對(duì)于小車運(yùn)行工況,如圖7(b)所示:0-3.63 s為啟動(dòng)階段,機(jī)構(gòu)做加速運(yùn)動(dòng),3.63-30.5 s為平穩(wěn)上升階段,機(jī)構(gòu)做勻速運(yùn)動(dòng),30.5-32.5 s為制動(dòng)階段,機(jī)構(gòu)做減速運(yùn)動(dòng)。在啟、制動(dòng)階段,小車運(yùn)行機(jī)構(gòu)吊重的水平慣性力使懸吊貨物的鋼絲繩相對(duì)鉛垂線產(chǎn)生偏擺,引起鋼絲繩的動(dòng)載荷。
對(duì)于大車運(yùn)行工況,如圖7(c)所示:0-4.98 s為啟動(dòng)階段,機(jī)構(gòu)做加速運(yùn)動(dòng),4.98-12.44 s為平穩(wěn)上升階段,機(jī)構(gòu)做勻速運(yùn)動(dòng),12.44-17 s為制動(dòng)階段,機(jī)構(gòu)做減速運(yùn)動(dòng)。在啟、制動(dòng)階段,大車運(yùn)行機(jī)構(gòu)吊重的水平慣性力引起鋼絲繩的偏擺,產(chǎn)生鋼絲繩的動(dòng)載荷。
3 兩種方法的比較
在啟、制動(dòng)階段,船用門機(jī)承受較大的沖擊動(dòng)載,以上采用基于振動(dòng)理論的動(dòng)載荷確定方法和基于虛擬樣機(jī)的動(dòng)載荷確定方法分別得到隨時(shí)間變化的動(dòng)載荷。針對(duì)300 t/43 mA型雙梁船用門機(jī),根據(jù)技術(shù)性能參數(shù)表,分別得到了最大動(dòng)載荷,如表1所示。
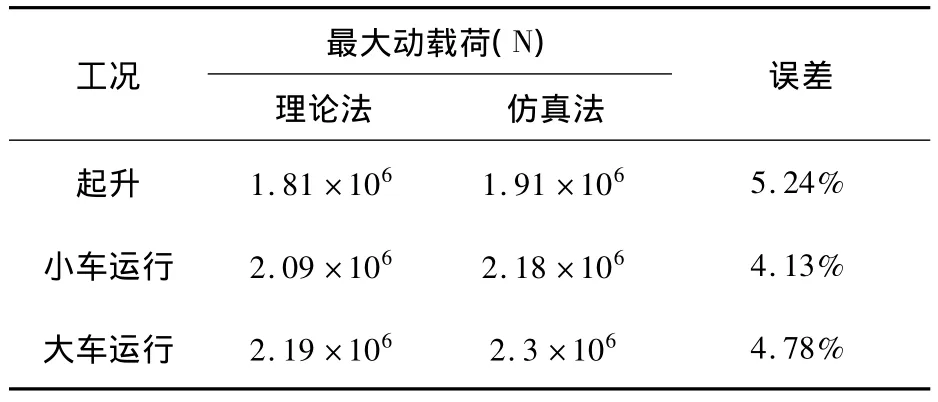
表1 兩種方法的最大動(dòng)載荷比較
通過比較,兩種方法得到的最大動(dòng)載荷比較接近,仿真值較理論值偏大,偏向于安全。但他們各有特點(diǎn),基于振動(dòng)理論的動(dòng)載荷確定方法對(duì)實(shí)際船用門機(jī)結(jié)構(gòu)進(jìn)行簡(jiǎn)化,根據(jù)模型形成系統(tǒng)的動(dòng)力學(xué)方程,最后求解動(dòng)力學(xué)方程。由于在簡(jiǎn)化的過程中存在假設(shè),與實(shí)際系統(tǒng)有一定誤差。而基于虛擬樣機(jī)的動(dòng)載荷確定方法,利用PRO/E和ADAMS聯(lián)合建模法建立船用門機(jī)虛擬樣機(jī)并進(jìn)行動(dòng)力學(xué)仿真,此方法以多體動(dòng)力學(xué)為支撐,較直觀,操作靈活,但需掌握一定的專業(yè)知識(shí)。
4 結(jié)語
采用基于振動(dòng)理論的動(dòng)載荷確定方法和基于虛擬樣機(jī)的動(dòng)載荷確定方法分別進(jìn)行微分方程求解和仿真模擬,得到了船用門機(jī)三大機(jī)構(gòu)在不同工況下隨時(shí)間變化的動(dòng)載荷,并對(duì)典型機(jī)型最大動(dòng)載荷進(jìn)行比較,得到的最大動(dòng)載荷為船用門式起重機(jī)動(dòng)態(tài)有限元分析提供了數(shù)據(jù)支撐。
[1] Xing Junwen,Tao Liaozhong,trans.Software MSC.MSC.ADAMS/View advanced training tutorial[M].Beijing:Tsinghua University Press,2004.
[2]楊長(zhǎng)骙.起重機(jī)械[M].北京:機(jī)械工業(yè)出版社,1982.
[3]胡曉光,隋允康,丁克勤,等.基于虛擬樣機(jī)技術(shù)的門式起重機(jī)動(dòng)力學(xué)仿真分析[J].科技導(dǎo)報(bào),2010(02).
[4]程文明,王金諾.起重機(jī)的動(dòng)態(tài)分析方法[J].起重運(yùn)輸機(jī)械,2002,(2):1-4.
[5]胡宗武,閻以誦.起重機(jī)動(dòng)力學(xué)[M].北京:機(jī)械工業(yè)出版社,1988.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
