一種組合神經(jīng)網(wǎng)絡(luò)在結(jié)構(gòu)優(yōu)化中的應(yīng)用
2013-10-14 06:55:34王矅辰紀(jì)愛敏張大偉郭聰聰
機械制造與自動化 2013年2期
王矅辰,紀(jì)愛敏,張大偉,郭聰聰
(河海大學(xué)機械工程學(xué)院,江蘇常州 213000)
0 神經(jīng)網(wǎng)絡(luò)優(yōu)化方法的研究和存在不足
結(jié)構(gòu)優(yōu)化設(shè)計是工程中的重要環(huán)節(jié),建立以性能最大化,成本最小化的多目標(biāo)優(yōu)化設(shè)計模型,利用有限元計算和優(yōu)化算法在指定參數(shù)區(qū)域內(nèi)找出設(shè)計參數(shù)的Pareto最優(yōu)解集的方法逐漸被工程中所采用。然而面對一些復(fù)雜的模型,和大量接觸的非線性問題,有限元的重復(fù)迭代計算存在大量的時間成本的投入,以神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)替代有限元計算為有效的方法。參考文獻[1]介紹了通過BP神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí),結(jié)合遺傳算法的多目標(biāo)優(yōu)化方法,并應(yīng)用與對液壓機的上梁優(yōu)化中,提高了優(yōu)化效率;參考文獻[2]介紹了利用RBF神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)取代有限元計算的可靠性,并以25桿桁架做為算例。然而目前大部分研究停留在整體方法介紹,對于提高神經(jīng)網(wǎng)絡(luò)應(yīng)力預(yù)測準(zhǔn)確度的研究卻較少涉及,而神經(jīng)網(wǎng)絡(luò)應(yīng)力預(yù)測的精度卻是整個方法成功與否的關(guān)鍵。本文在挖掘機動臂仿真分析基礎(chǔ)上,簡述BP神經(jīng)網(wǎng)絡(luò)和RBF神經(jīng)網(wǎng)絡(luò)的預(yù)測特點,并提出BPRBF組合的神經(jīng)網(wǎng)絡(luò),進一步擴展RBF神經(jīng)網(wǎng)絡(luò)的應(yīng)用范圍和BP神經(jīng)網(wǎng)絡(luò)的預(yù)測精度。
1 神經(jīng)網(wǎng)絡(luò)的原理簡介
1.1 BP神經(jīng)網(wǎng)絡(luò)的基本原理
BP神經(jīng)網(wǎng)絡(luò)(back propagation neural network),被稱為誤差方向傳播網(wǎng)絡(luò),它是由非線性變換單元組成的前饋網(wǎng)絡(luò),由輸入層、中間層和輸出層組成。BP神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí)過程由兩部分組成:正向傳播和反向傳播。當(dāng)正向傳播時,信息從輸入層經(jīng)過隱層單元處理后傳向輸出層,當(dāng)輸出層得到不希望的輸出時,則反向傳播,將誤差信號沿原來的神經(jīng)通路返回,同時不斷修改連接權(quán)值和閾值。BP網(wǎng)絡(luò)的實質(zhì)是求解誤差函數(shù)的最小值問題,利用它可以實現(xiàn)多層前饋神經(jīng)網(wǎng)絡(luò)權(quán)值的調(diào)節(jié)。BP算法可以使網(wǎng)絡(luò)權(quán)值收斂到一個最終解,但并不能保證所求的誤差為全局最優(yōu)解,也就是容易陷入局部極小值。
1.2 RBF神經(jīng)網(wǎng)絡(luò)的基本原理
RBF神經(jīng)網(wǎng)絡(luò)(radial basis function neural network)是單隱層前饋型神經(jīng)網(wǎng)絡(luò),輸入層節(jié)點只是傳遞輸入信號到隱層,它是一個三層前向網(wǎng)絡(luò)。RBF神經(jīng)網(wǎng)絡(luò)的顯著特點是隱含節(jié)點的基函數(shù)采用的是距離函數(shù),并使用RBF作為激活函數(shù)。RBF關(guān)于n維空間的一個中心點具有對稱性,神經(jīng)元輸入距離該中心越遠(yuǎn),激活成功率就越低,這個局部特性可以看出RBF神經(jīng)網(wǎng)絡(luò)不同與BP神經(jīng)網(wǎng)絡(luò),它是一個局部響應(yīng)網(wǎng)絡(luò),所以訓(xùn)練速度更快,同時缺點也是當(dāng)樣本輸入?yún)^(qū)域較大時,如何保證足夠的輸入?yún)^(qū)域,是能否保持學(xué)習(xí)精度的研究重點,另外與BP神經(jīng)網(wǎng)絡(luò)不同的是,它不需要誤差的反向傳播,節(jié)省了大量的運算時間,而且需要確定的參數(shù)較少,僅需確定散布常數(shù)(SPREAD)。散布常數(shù)的確定方法一般采用湊試法和聚類法,本文采用的是湊試法。
2 挖掘機動臂的有限元試驗
2.1 挖掘機動臂簡介
液壓挖掘機隨著國家基礎(chǔ)建設(shè)工作的普及,得到快速的發(fā)展。工作裝置是液壓挖掘機的重要部件,對挖掘機性能有著十分重要的影響。挖掘機動臂的整體式彎臂采用大圓弧過渡以減小該地方的應(yīng)力集中。主體框架由上蓋板、下蓋板、左側(cè)板、和右側(cè)板焊接而成。上下蓋板,左右側(cè)板均由前后厚度為5~19 mm的16 Mn鋼板拼焊而成。動臂與轉(zhuǎn)臺、斗桿、動臂油缸連接的軸座均由ZG270-500材料焊接而成,軸座四周焊有四塊加強筋板以提高強度。
2.2 挖掘機動臂優(yōu)化變量選取及有限元模型
[7-8]介紹了動臂參數(shù)的優(yōu)化,主要集中在動臂外形幾何尺寸的優(yōu)化,對動臂焊接板厚度的研究卻很少。本文選取的變量為上蓋板厚度d0、下蓋板厚度d1、左右側(cè)板厚度d2、上耳板厚度d3、前耳板厚度d4。首先在ABAQUS中應(yīng)用殼體建模,建立了包括上蓋板、下蓋板、左右側(cè)板、前后耳板等零件,在軟件中完成裝配,方便針對不同厚度的薄板進行賦予屬性。有限元模型如圖1。

圖1 挖掘機動臂有限元模型
2.3 計算工況選取以及邊界條件處理
a)計算工況
本文計算工況選取為挖掘機動臂可能出現(xiàn)的最大載荷工況來計算,即動臂缸全縮,斗桿與斗桿缸鉸接點、斗桿和鏟斗鉸接點及鏟斗齒尖在同一直線上且垂直于斗桿缸。
b)有限元模型約束和載荷的處理
為了消除模型的剛體位移,對動臂和轉(zhuǎn)臺的鉸點,約束其x,y,z方向的移動自由度與繞x,y軸的旋轉(zhuǎn)自由度,釋放z方向的旋轉(zhuǎn)約束(ROTZ)。對動臂與斗桿的鉸點,約束其y方向的移動自由度,對其他與油缸的鉸點以施加載荷的方式處理。
c)各鉸點銷孔處理方法
由于動臂是通過銷軸孔處通過接觸傳力,銷軸孔力不是按照均勻分布而是近似的余弦分布,且存在一定的接觸應(yīng)力集中現(xiàn)象。為了減少計算誤差,同時又不致使運算計算量加大,本文在ABAQUS軟件中銷軸孔中心設(shè)置reference points(RP),利用RP與銷孔表面設(shè)置結(jié)構(gòu)耦合約束,通過RP來施加載荷模擬接觸受力(圖2)。
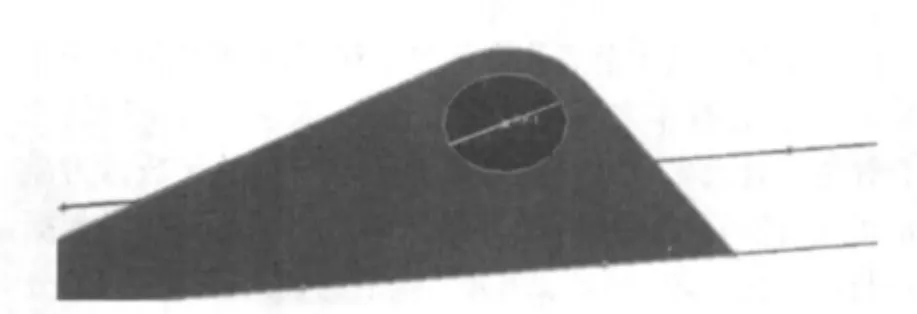
圖2 銷孔的受力處理
2.4 正交設(shè)計試驗安排
正交試驗設(shè)計是利用數(shù)理統(tǒng)計學(xué)和正交性原理,從大量的試驗點中挑選適量的具有代表性的試驗點,應(yīng)用正交表合理安排多因素試驗的一種科學(xué)的試驗設(shè)計方法。其主要的優(yōu)點是利用較少次數(shù)的試驗,得到因素對目標(biāo)函數(shù)影響顯著性及其影響規(guī)律。根據(jù)挖掘機動臂參數(shù)特點,選取五因素四水平的正交表L16(4)5,其中16為試驗次數(shù),4為因素的水平數(shù),5為因素數(shù)。具體試驗安排及試驗結(jié)果如表1,最終動臂應(yīng)力云圖(圖3)。
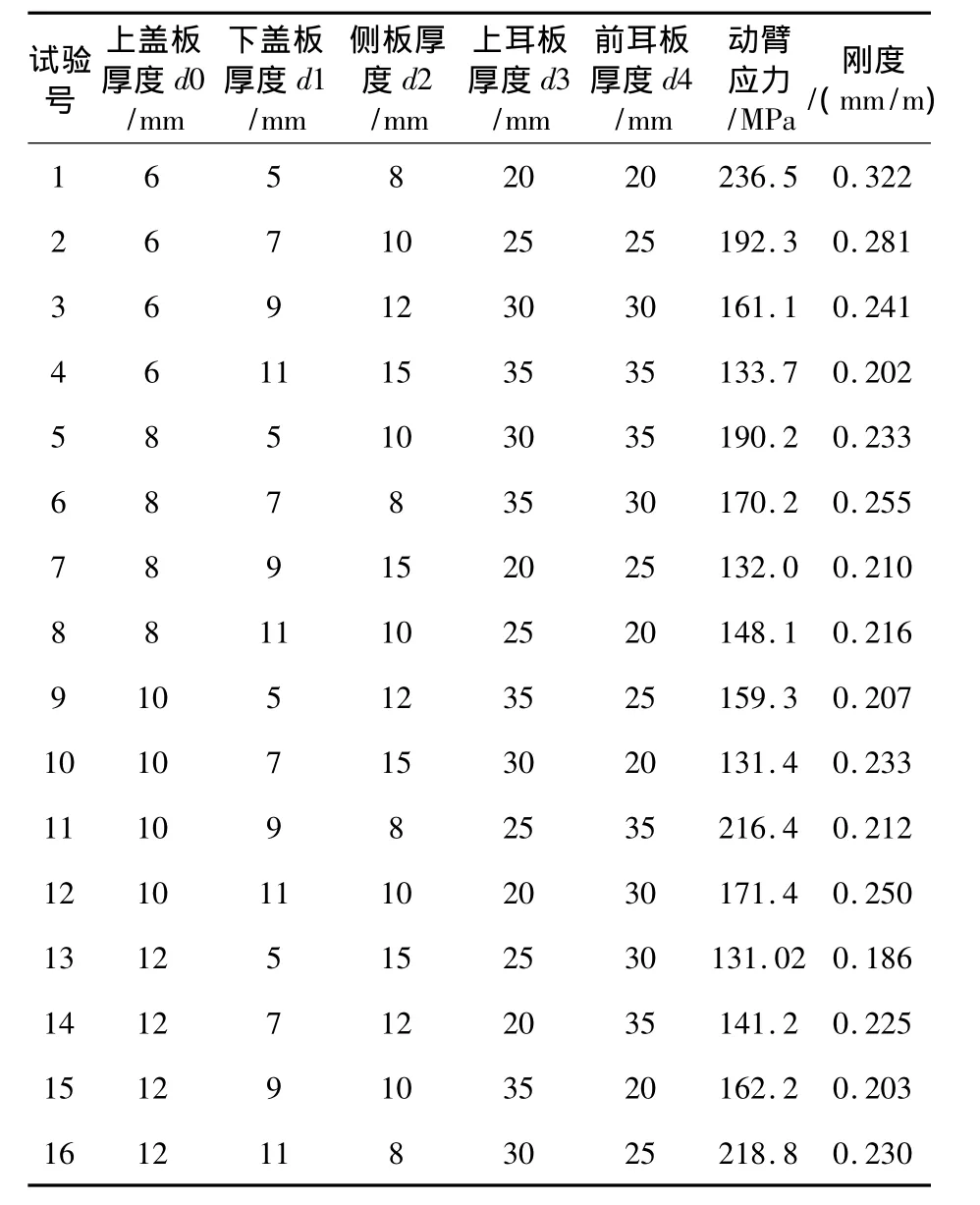
表1 正交試驗結(jié)果

圖3 挖掘機動臂應(yīng)力云圖
3 神經(jīng)網(wǎng)絡(luò)的設(shè)計與仿真
3.1 數(shù)據(jù)歸一化處理
由于網(wǎng)絡(luò)輸入節(jié)點物理量各不相同,有的數(shù)值差距非常大,各指標(biāo)樣本之間不存在可比性,無法進行正確的綜合評估。且大多數(shù)神經(jīng)網(wǎng)絡(luò)模型采取S形的函數(shù)做為激活函數(shù),該函數(shù)的值域在【0,1】區(qū)間內(nèi)。因此需要對數(shù)據(jù)進行歸一化處理,本文采用激活函數(shù)的極大值和極小值分別為1和0,所以本文將數(shù)據(jù)歸一到區(qū)間【0.05,0.95】內(nèi),以便讓樣本有足夠的增長空間,采用的歸一化公式為:
式中:Xmax,Xmin是樣本變量的最大值和最小值;Xi和Xi'分別是歸一化前和歸一化后的值。
3.2 BP神經(jīng)網(wǎng)絡(luò)與RBF神經(jīng)網(wǎng)絡(luò)設(shè)計
所有網(wǎng)絡(luò)設(shè)計都在MATLAB軟件中創(chuàng)建,BP神經(jīng)網(wǎng)絡(luò)采用三層的網(wǎng)絡(luò)設(shè)計,隱含層傳遞函數(shù)選擇tansig,訓(xùn)練方法選擇 trainlm,調(diào)用語句 net=newff(P,T,7,{‘tansig’},’trainlm’)完成BP網(wǎng)絡(luò)的創(chuàng)建;RBF神經(jīng)網(wǎng)絡(luò)不需要進行各種參數(shù)確定,只需要確定散布常數(shù)SPREAD,采用湊試法,從 0.5,0.7,0.9,1.1……2.0 中逐一試驗,確定最佳的 SPREAD 值為0.7,調(diào)用 net=newrbe(P,T,0.7)完成徑向基網(wǎng)絡(luò)創(chuàng)建。兩種網(wǎng)絡(luò)訓(xùn)練誤差曲線如圖4,圖5。

3.3 BP-RBF組合神經(jīng)的網(wǎng)絡(luò)設(shè)計
BP神經(jīng)網(wǎng)絡(luò)采取BP算法反向傳播,容易陷入局部最小值,泛化能力較差,利用BP神經(jīng)網(wǎng)絡(luò)與RBF神經(jīng)網(wǎng)絡(luò)串聯(lián),通過RBF的快速逼近,對BP網(wǎng)絡(luò)進行進一步訓(xùn)練。其中第一部分為BP神經(jīng)網(wǎng)絡(luò),第二部分為RBF神經(jīng)網(wǎng)絡(luò),兩種神經(jīng)網(wǎng)絡(luò)中的神經(jīng)元層與層間沒有連接,層間全連接。網(wǎng)絡(luò)結(jié)構(gòu)模型如圖6。
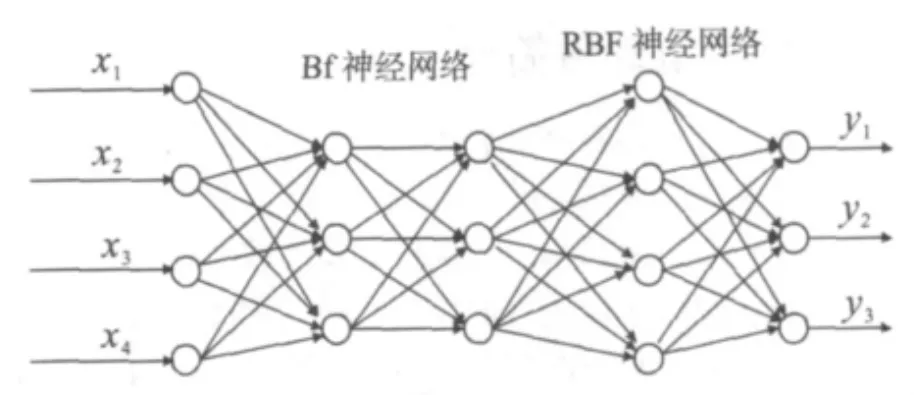
圖6 BP-RBF組合神經(jīng)網(wǎng)絡(luò)模型
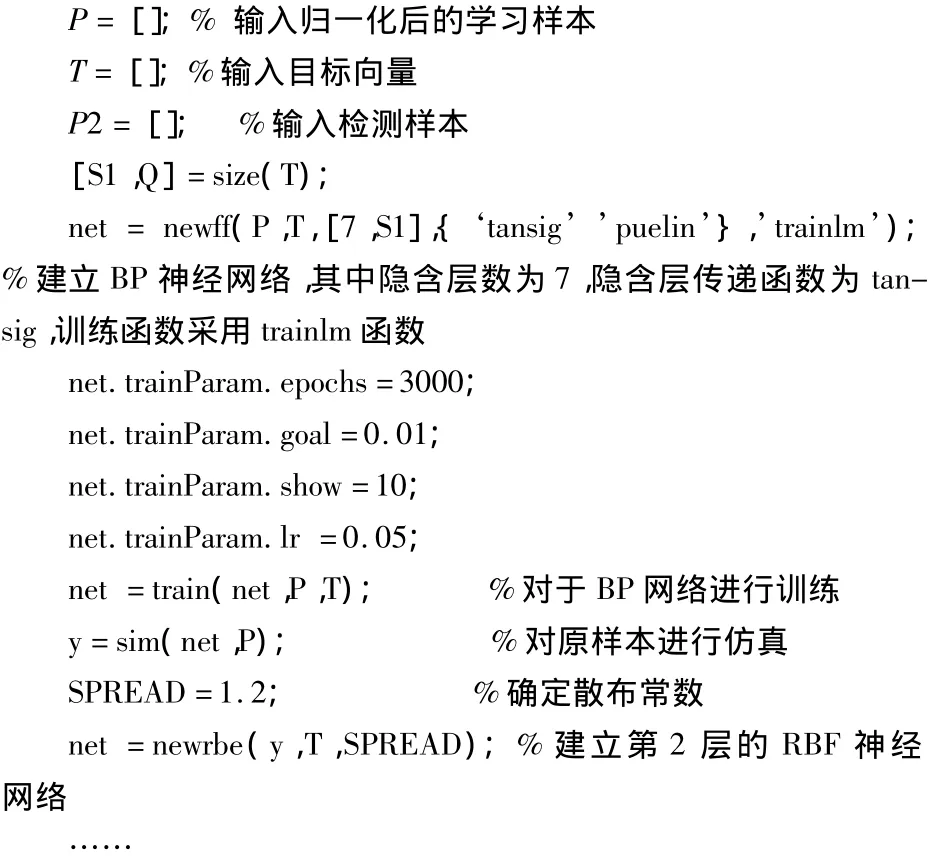
在BP-RBF組合神經(jīng)網(wǎng)絡(luò)中,BP神經(jīng)網(wǎng)絡(luò)的設(shè)計和3.2條中相同,輸入層為個數(shù)為16,隱含層為7,傳遞函數(shù)為S型函數(shù),輸出層為2;RBF神經(jīng)網(wǎng)絡(luò)比3.2條中精簡,其輸入層個數(shù)與BP神經(jīng)網(wǎng)絡(luò)輸出層相同,散布常數(shù)SPREAD值需要重新試驗確定,傳遞函數(shù)使用高斯函數(shù),仿真編程在MATLAB中部分代碼如下:
3.4 三種神經(jīng)網(wǎng)絡(luò)預(yù)測結(jié)果分析對比
分別將組合神經(jīng)網(wǎng)絡(luò),BP神經(jīng)網(wǎng)絡(luò),RBF神經(jīng)網(wǎng)絡(luò)的預(yù)測結(jié)果進行對比,檢測樣本的預(yù)測誤差對比如表2,表中樣本數(shù)據(jù)為歸一化后的數(shù)據(jù)。

表2 三種神經(jīng)網(wǎng)絡(luò)預(yù)測誤差的對比

3 0.08 0.11 0.14 0.8 0.8 213.7 210.3 0.014 2 184.8 0.131 9 210.5 0.014 9 4 0.14 0.17 0.26 0.8 0.5 153.5 135.5 0.117 2 151.0 0.016 2 151.0 0.016 2 5 0.20 0.11 0.14 0.8 0.5 205.7 192.9 0.047 6 186.1 0.123 4 195.5 0.048 7 6 0.14 0.05 0.35 0.5 0.95 144.1 131.7 0.089 4 141.5 0.018 1 141.5 0.018 1
由仿真分析對三種神經(jīng)網(wǎng)絡(luò)做一下對比:
從網(wǎng)絡(luò)結(jié)構(gòu)上,BP神經(jīng)網(wǎng)絡(luò)和組合神經(jīng)網(wǎng)絡(luò)的網(wǎng)絡(luò)結(jié)構(gòu)較RBF神經(jīng)網(wǎng)絡(luò)精簡,其中BP神經(jīng)網(wǎng)絡(luò)隱含神經(jīng)元為7,組合神經(jīng)網(wǎng)絡(luò)的第一隱含層神經(jīng)元數(shù)為7,0神經(jīng)網(wǎng)絡(luò)的隱含層神經(jīng)數(shù)為16。在BP神經(jīng)網(wǎng)絡(luò)中,sigmoid神經(jīng)元能覆蓋較大的輸入?yún)^(qū)域,而徑向基采用高斯函數(shù)作為傳遞函數(shù)決定了其只能對較小的區(qū)域產(chǎn)生響應(yīng),徑向基的隱藏神經(jīng)元等同于學(xué)習(xí)樣本數(shù),所以當(dāng)輸入?yún)^(qū)間較大,學(xué)習(xí)樣本較多的時候RBF神經(jīng)網(wǎng)絡(luò)需要更多的神經(jīng)元去滿足預(yù)測精度,導(dǎo)致了網(wǎng)絡(luò)結(jié)構(gòu)的冗贅。
從預(yù)測精度上,三種神經(jīng)網(wǎng)絡(luò)都展現(xiàn)了良好的訓(xùn)練精度,證明神經(jīng)網(wǎng)絡(luò)預(yù)測應(yīng)力的方法是可行的。其中BP神經(jīng)網(wǎng)絡(luò)在3、4號預(yù)測樣本中的誤差出現(xiàn)了較大的跳躍,誤差大于百分之10;RBF神經(jīng)網(wǎng)絡(luò)預(yù)測平穩(wěn),僅在6號樣本出現(xiàn)百分之8的誤差;BP-RBF組合神經(jīng)網(wǎng)絡(luò)中通過RBF網(wǎng)絡(luò)的進一步訓(xùn)練,兩處跳躍誤差得到了改善,在預(yù)測精度上組合網(wǎng)絡(luò)顯示出優(yōu)于BP和RBF神經(jīng)網(wǎng)絡(luò)的性能。
訓(xùn)練時間上,BP神經(jīng)網(wǎng)絡(luò)的訓(xùn)練時間為32.7 s,迭代200次;由于RBF神經(jīng)網(wǎng)絡(luò)避免了BP網(wǎng)絡(luò)冗贅的反向誤差傳播計算,通過局部映射大大提高了訓(xùn)練速度,RBF神經(jīng)網(wǎng)絡(luò)訓(xùn)練代數(shù)僅為20次,訓(xùn)練時間為7.2 s;RBP神經(jīng)網(wǎng)絡(luò)了較快的收斂速度,大于BP神經(jīng)網(wǎng)絡(luò)和組合神經(jīng)網(wǎng)絡(luò)
綜上可知,RBF神經(jīng)網(wǎng)絡(luò)和組合神經(jīng)網(wǎng)絡(luò)可實現(xiàn)互補應(yīng)用,當(dāng)學(xué)習(xí)樣本較少的時候采用RBF神經(jīng)網(wǎng)絡(luò)實現(xiàn)較快的收斂,較平穩(wěn)的預(yù)測精度;當(dāng)學(xué)習(xí)樣本眾多,輸入?yún)^(qū)間跨度大的時候,為了精簡網(wǎng)絡(luò)結(jié)構(gòu),防止誤差跳躍,可以利用BP-RBF組合神經(jīng)網(wǎng)絡(luò)實現(xiàn)精簡的網(wǎng)絡(luò)結(jié)構(gòu)和滿意的預(yù)測精度。
4 結(jié)語
本文分析了BP神經(jīng)網(wǎng)絡(luò)和RBF神經(jīng)網(wǎng)絡(luò)在應(yīng)力預(yù)測中的應(yīng)用特點,提出了BP-RBF組合神經(jīng)網(wǎng)絡(luò),通過實例仿真證明了,BP-RBF組合神經(jīng)網(wǎng)絡(luò)的誤差滿足工程應(yīng)用需求,并提高了BP神經(jīng)網(wǎng)絡(luò)在應(yīng)力應(yīng)變預(yù)測中的準(zhǔn)確度,解決了RBF神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)樣本繁多時候,需要相應(yīng)多的神經(jīng)元的問題,具有普適性。可以和RBF神經(jīng)網(wǎng)絡(luò)結(jié)合使用解決各種輸入樣本情況下的結(jié)構(gòu)優(yōu)化問題,提高運算效率。
參考文獻:
[1]李艷聰,張連洪.基于神經(jīng)網(wǎng)絡(luò)和遺傳算法的液壓機上梁輕量化和剛度優(yōu)化設(shè)計[J].機械科學(xué)與技術(shù),2010,(2):164-169.
[2]朱學(xué)軍,薛量,王安麟,等.利用神經(jīng)網(wǎng)絡(luò)實現(xiàn)復(fù)雜結(jié)構(gòu)的多目標(biāo)優(yōu)化設(shè)計[J].機械科學(xué)與技術(shù),2000,(3):368-370.
[3]田雨波.混合神經(jīng)網(wǎng)絡(luò)技術(shù)[M].北京:科學(xué)出版社,2009.
[4]麻官亮,邵玉剛.BP和RBF神經(jīng)網(wǎng)絡(luò)在邊坡穩(wěn)定性評估中的比較研究[J].路基工程,2012,(1):161-164.
[5]孫大洪,王發(fā)展,劉強,等.基于BP和RBF神經(jīng)網(wǎng)絡(luò)的滾動軸承故障診斷比較[J].軸承,2010,(2):53-56.
[6]孫德豐.MATLAB神經(jīng)網(wǎng)絡(luò)仿真與應(yīng)用[M].北京:電子工業(yè)出版社,2009.
[7]朱奇,孫紀(jì)燕.液壓挖掘機動臂優(yōu)化設(shè)計[J].工程機械,2008,(9):34-36.
[8]黃美美,趙婷婷.液壓挖掘機動臂有限元分析[J].設(shè)計與研究,2006 ,(8):19-22.
[9]牟洪波,戚大偉.基于BP和RBF神經(jīng)網(wǎng)絡(luò)的木材缺陷檢驗研究[M].哈爾濱:哈爾濱工程大學(xué)出版社,2011.
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
機械工程師(2015年10期)2015-02-02 01:14:03
機電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
