基于Matlab\Simulink對半主動懸架的Fuzzy-PID控制仿真研究
2013-10-09 03:28:00郝莉紅王志騰
河北工業科技 2013年1期
郝莉紅,王志騰,陳 洪
(1.河北工程大學機電學院,河北邯鄲 056038;2.東風汽車車輪有限公司,湖北十堰 442000)
目前,國內外科技人員對汽車主動、半主動懸架控制方式的研究,由基于精確數學模型的傳統控制方法,轉到基于不確定模型的非線性控制[1]。汽車控制技術也從古典控制技術向現代、智能控制技術發展。智能控制方法中模糊控制和PID控制是較適用的。本文將兩者控制方法協同使用,模糊PID控制器中,模糊邏輯控制方法不依靠系統的數學模型,可以處理參數的非線性和不確定性問題,具有靈活性和適應性的特點,模糊與PID協同控制,將使半主動懸架更好地發揮作用[2]。
1 建立2自由度1/4半主動懸架數學模型
車輛是一個極其復雜的振動系統,其振動屬于無限自由度的連續體的振動。它的主要振源來自路面,其次來自發動機和傳動系[3]。本文選擇2自由度1/4單輪汽車振動模型作為研究對象,圖1為2自由度1/4半主動懸架汽車力學模型。
根據Lagrange方程得到圖1所建立的系統的運動微分方程為
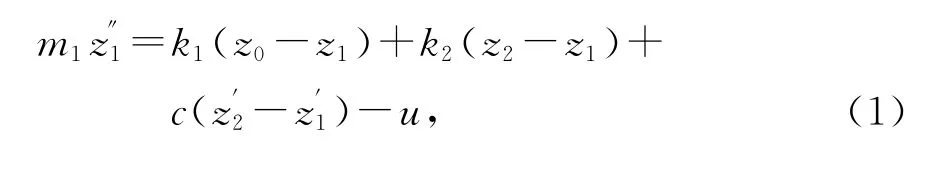
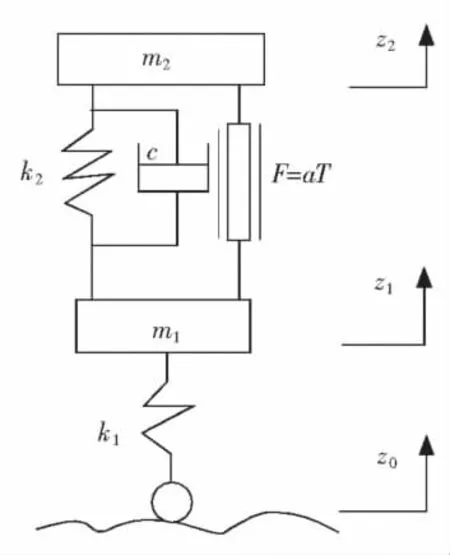
圖1 2自由度1/4半主動懸架汽車力學模型Fig.1 Two-degree of freedom 1/4semi active suspension mathematical model
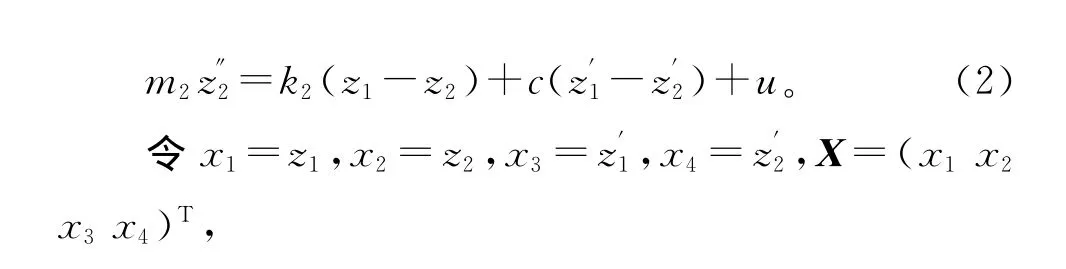
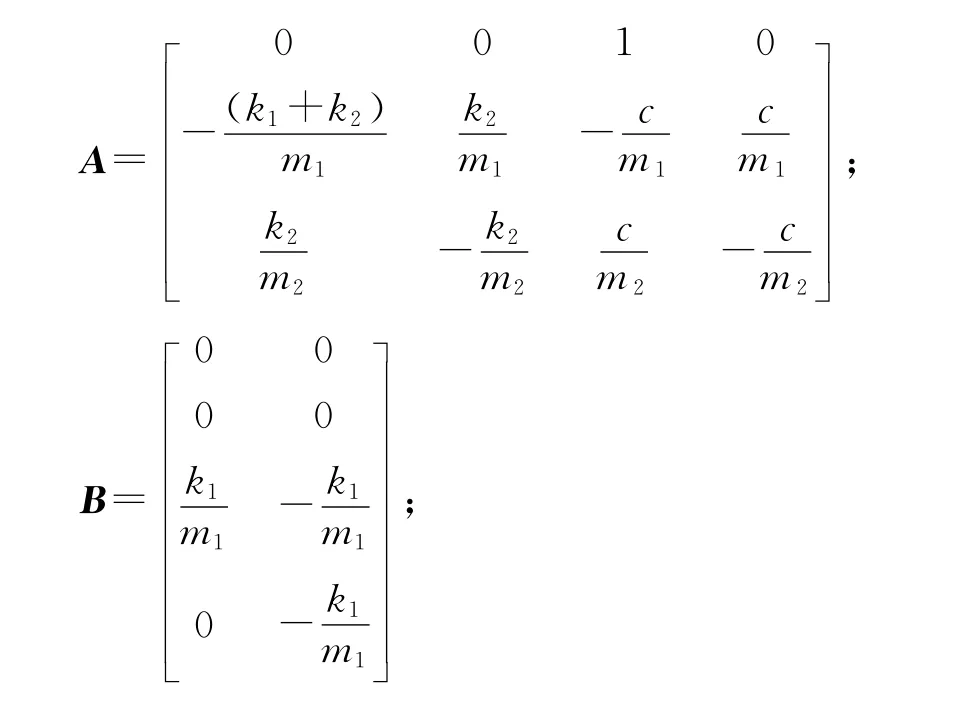
則系統狀態方程為

以車身質量垂直方向的加速度、車身質量垂直方向的速度、車身質量與車輪質量之間的相對位移z2-z1作為輸出變量,
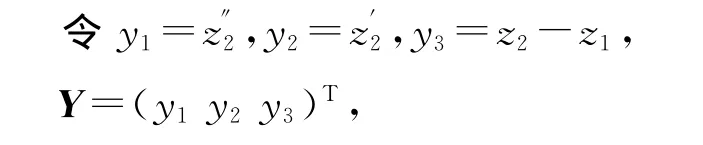
則輸出方程為

式(3)、式(4)中:U=(z0u)T;
2 路面的輸入
本文仿真所用的隨機路況是由白噪聲積分方法所產生的,以車速為定值不變作為前提,汽車的速度時域功率譜就是一種白噪聲信號,譜密度為常數4π2Gq(n0)n2v,于是,路面輪廓可由譜密度的白噪聲通過積分器產生[4],即

式中:k0=2πn0(Gq(n0)v)-2;ω(t)為單位白噪聲;n0為參考空間頻率,n0=0.1m-1;Gq(n0)為路面不平度系數。
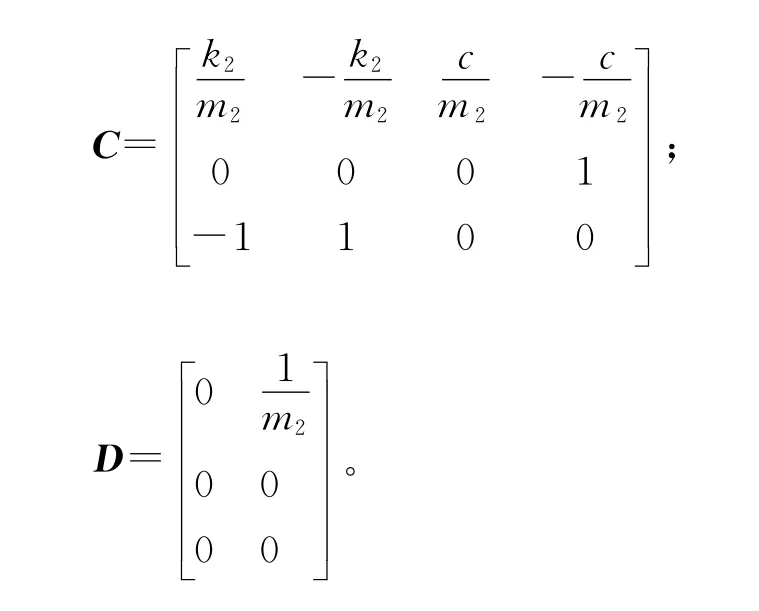
當路面為C級時,路面不平度系數Gq(n0)=256×10-6m3,車速為25m/s時,利用 Matlab\Simulink構造出積分白噪聲模型,仿真得出隨機信號波形,如圖2和圖3所示。
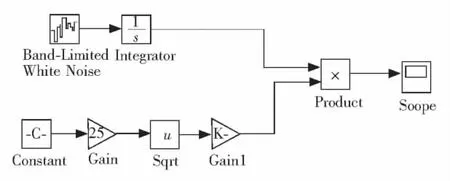
圖2 路面激勵仿真模型Fig.2 Pavement incentive simulation model
3 Fuzzy-PID控制系統的設計
3.1 Fuzzy-PID控制器的結構
模糊控制器的設計是Fuzzy-PID控制系統的核心內容,本文采用二維模糊控制器,以車身垂直速度誤差信號e和車身垂直加速度信號ec作為模糊控制器的輸入,以kP,kI,kD為模糊控制器的輸出量,輸入、輸出變量都選擇7個模糊集子集{NB,NM,NS,ZO,PS,PM,PB}。
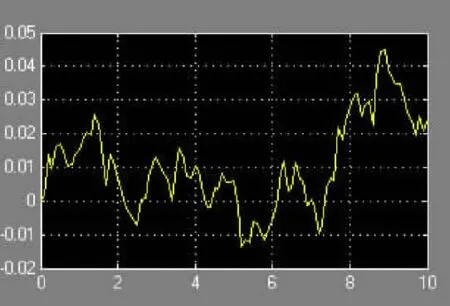
圖3 路面信號Fig.3 Pavement signal
3.2 確定控制器的參數選擇
兩輸入e和ec的基本論域分別為[-0.8,0.8]和[-8.3,8.3],相應的模糊論域為{-3,-2,-1,0,1,2,3};輸出的基本論域是[-900,900],相應的模糊論域為{-6,-4,-2,0,2,4,6},量化因子ke為0.36,kec為3.75,比例因子取150。
模糊控制器的隸屬函數選取較常用的三角形函數trimf,輸出量的解模糊化采用面積平分法bisrctor。
3.3 確定模糊規則(見表1)
根據各模糊子集的隸屬度和各參數模糊模型,運用模糊控制規則表,查出修正參數代入式(6)中計算[2]:
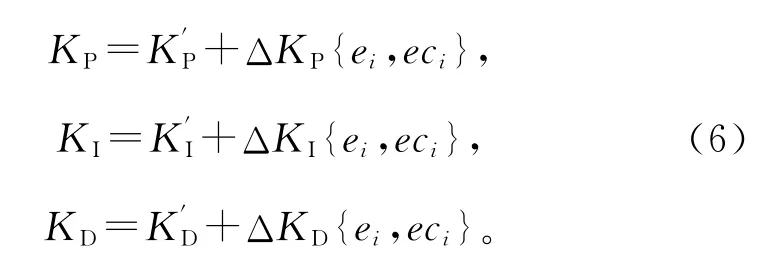
式中:KP,KI,KD為整定后的比例、積分及微分因子;K′P,K′I,K′D為 PID 的參數的初始值;{ei,eci}為e和ec對應的模糊控制規則;ΔKP,ΔKI,ΔKD為修正系數。
4 仿真結果與仿真分析
依據式(1)所建立的2自由度1/4半主動懸架動力學模型,用Matlab\Simulink建立仿真模型,仿真中所采用的參數見表2。
半主動懸架模糊PID控制模型見圖4。
4.1 仿真分析結果
圖5~圖7為仿真分析圖,由圖可知半主動懸架使用Fuzzy-PID控制方法比單獨使用模糊控制或PID控制方法有良好的魯棒性,可以有效地提高懸架的車輛行駛平順性和操作穩定性。

表1 KP,KI,KD 模糊控制規則Tab.1 Fuzzy control rule of KP,KI,KD
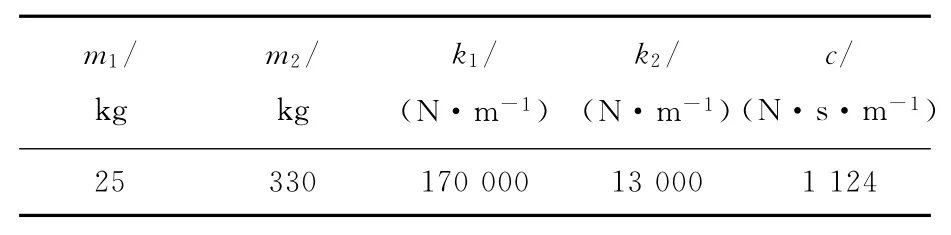
表2 模型仿真參數表Tab.2 Model simulation parameters
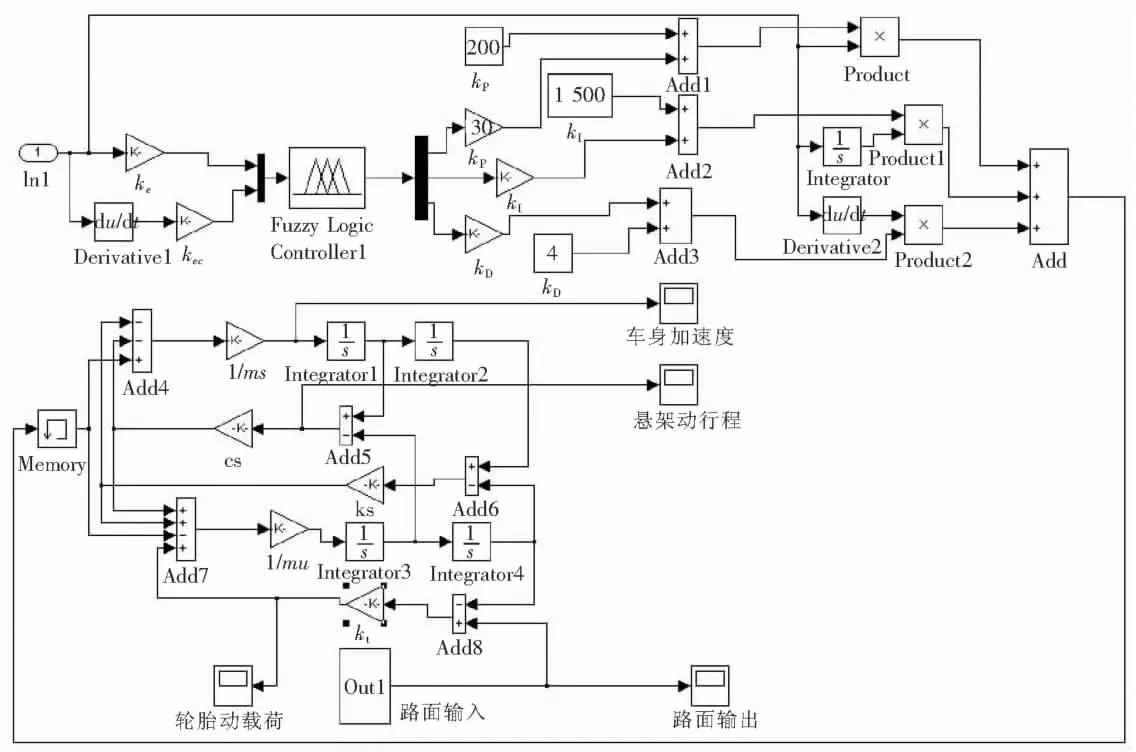
圖4 半主動懸架模糊PID控制模型Fig.4 Fuzzy PID control model of semi active suspension
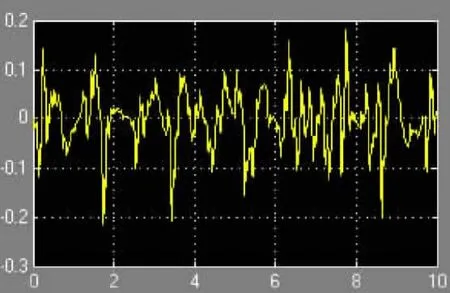
圖5 懸架動行程Fig.5 Suspension dynamic stroke
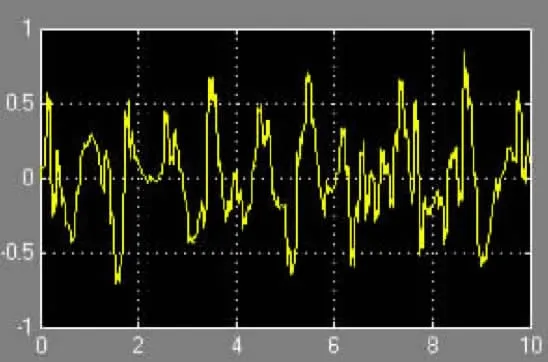
圖6 車身加速度Fig.6 Body acceleration
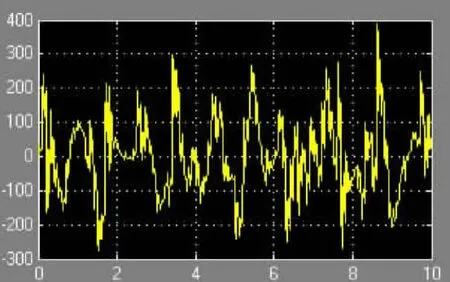
圖7 輪胎動載荷Fig.7 Tyre dynamic load
5 結 論
在白噪聲路面激勵條件下,模糊PID控制可以有效地提高懸架的車輛行駛平順性和操作穩定性,驗證了模糊PID控制具有較好的自適應能力。但對PID參數的整定和模糊控制規則的制定需要較豐富的實踐經驗,為克服這一缺點,應采用遺傳算法或粒子群算法等優化方法加以改善,這為下一步研究提供了一個新思路。
/References:
[1]張大千,張天俠.車輛半主動懸架的模糊控制與仿真[J].機械設計,2008,25(9):21-24.ZHANG Daqian,ZHANG Tianxia.Fuzzy control and simulation on semi-active suspension frame of vehicles[J].Journal of Machine Design,2008,25(9):21-24.
[2]劉 潛,王天利.汽車半主動懸架的模糊PID控制仿真研究[J].農業裝備與車輛工程,2011(7):21-24.LIU Qian,Wang Tianli.Study on fuzzy PID control simulation of semi-active suspension[J].Agricultural Equipment &Vehicle Engineering,2011(7):21-24.
[3]張慧剛,楊 建.車輛半主動懸架動力學分析及模糊PID控制仿真[J].拖拉機與農用運輸車,2011,38(1):14-19.ZHANG Huigang,YANG Jian.Dynamic analysis and fuzzy-PID control simulation of semi-active vehicle suspension[J].Tractor &Farm Transporter,2011,38(1):14-19.
[4]韓豫萍.智能控制在汽車半主動懸架中的應用[D].山東:山東輕工業學院,2009.HAN Yuping.Intelligent Control Application in Automotive Semi-active Suspension[D].Shandong:Shandong Polytechnic University,2009.
[5]曾潔如,谷正氣,李偉平,等.基于遺傳算法的半主動懸架模糊PID控制研究[J].汽車工程,2010,32(5):429-433.ZENG Jieru,GU Zhengqi,LI Weiping,et al.A research on the fuzzy PID control for vehicle semi-active suspension based on genetic algorithm [J].Automotive Engineering,2010,32(5):429-433.
[6]楊啟耀,周孔亢,張文娜,等.半主動空氣懸架Fuzzy-PID控制[J].農業機械學報,2008,39(9):24-29.YANG Qiyao,ZHOU Kongkang,ZHANG Wenna,et al.Fuzzy-PID control on semi active air suspension[J].Transactions of the Chinese Society for Agricultural Machinery,2008,39(9):24-29.
[7]張 謙.1/2汽車半主動懸架模糊PID控制器設計與仿真[J].公路與汽運,2008(3):25-27.ZHANG Qian.1/2automotive semi-active suspension fuzzy PID controller design and simulation[J].Highways &Automotive Applications,2008(3):25-27.
[8]樊登柱,吳 煒,姚嘉伶,等.汽車磁流變半主動懸架的模糊控制[J].南通職業大學學報,2008,22(4):96-99.FAN Dengzhu,WU Wei,YAO Jialing,et al.Fuzzy control for automotive semi-active suspension with MR damper[J].Journal of Nantong Vocational College,2008,22(4):96-99.
[9]何青瑋,林 青.MATLAB在汽車半主動懸架仿真中的應用[J].機床與液壓,2002(3):34-36.HE Qingwei,LIN Qing.The application of MATLAB in the simulation of vehicle semi-active suspension[J].Machine Tool&Hydraulics,2002(3):34-36.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
核科學與工程(2015年4期)2015-09-26 11:59:03
決策探索(2014年21期)2014-11-25 12:29:50
中學數學雜志(初中版)(2006年1期)2006-12-29 00:00:00
