超衍射成像中雙螺旋點擴展函數(shù)的三維定位精度*
2013-09-27 11:03:50陳鶴于斌陳丹妮李恒牛憨笨
物理學報 2013年14期
陳鶴 于斌 陳丹妮 李恒 牛憨笨
(深圳大學光電工程學院,光電子器件與系統(tǒng)(教育部/廣東省)重點實驗室,深圳 518060)
(2013年3月7日收到;2013年3月29日收到修改稿)
1 引言
得一了種
近較是年大基來的于,發(fā)縮遠展小場有[1納].效米目激分前發(fā)辨最光熒為斑突光,出顯 通的微 過方成 直法像 接有技 減兩術(shù) 小種取點,擴展函數(shù)的半高寬來提高分辨率,包括受激輻射耗盡(stimulated emission depletion,STED)、基態(tài)耗盡(ground state depletion,GSD)、飽和結(jié)構(gòu)激發(fā)顯微術(shù)(saturated pattern excitation microscopy,SPEM)等;另一種則是基于單分子定位技術(shù),包括隨機光學重建顯微術(shù)(stochastic optical reconstruction microscopy,STORM)、光敏定位顯微術(shù)(photoactivated localization microscopy,PALM)及熒光PALM(fl uorescence photoactivation localization microscopy,fPALM)等.前者是利用受激態(tài)或基態(tài)耗盡的方式,壓縮熒光有效發(fā)射區(qū)域;后者則是利用熒光標記本身的開關(guān)效應(yīng),通過稀疏激發(fā)、分時成像、質(zhì)心定位以及圖像合成來實現(xiàn)納米分辨成像,并已經(jīng)實現(xiàn)20 nm的橫向空間分辨率成像.
然而,傳統(tǒng)的單分子定位方法只能對分子進行二維也就是橫向定位,但對于軸向分辨率并沒有提高.結(jié)合某些改進軸向分辨率的方法,如柱面鏡定位[2]、雙焦面探測[3]、雙螺旋點擴展函數(shù)法(double helix point spread function,DH-PSF)[4]以及熒光干涉法[5]等,能將軸向分辨率提高到50 nm的水平.其中,DH-PSF是通過特殊設(shè)計相位板,改變系統(tǒng)的點擴展函數(shù)形成雙螺旋的形式,并且旋轉(zhuǎn)的方向與熒光分子的軸向位置有關(guān),從而獲得熒光分子的軸向定位.該方法具有相比其他方法更長的可探測焦深范圍,并且在整個成像深度內(nèi),點擴展函數(shù)的形狀近似不變,僅隨軸向位置發(fā)生旋轉(zhuǎn),而不像其他方法需要通過精確形狀圖像比對來得到軸向位置,從而定位精度可以做得更高.
考慮到單分子定位超分辨方法中,定位精度直接決定了其極限分辨率,因此有必要對DH-PSF的三維定位精度進行詳細的分析.本文通過兩種方法來分析DH-PSF的三維定位精度:首先,基于費希爾信息量(Fisher information,FI)理論分析了DH-PSF的三維FI理論定位精度;此外,基于高斯擬合質(zhì)心定位算法,利用誤差傳遞理論求得DH-PSF的三維模擬質(zhì)心定位精度,并對二者進行了比較和分析.結(jié)果表明,在光子數(shù)大于1000的情況下,二者得到的定位精度接近.本文重點分析了光子數(shù)、背景噪聲、軸向位置對定位精度的影響,這將對于DH-PSF的三維定位實驗提供理論指導.
2 DH-PSF實現(xiàn)三維納米定位原理
DH-PSF實現(xiàn)三維納米定位是基于一種被稱為自成像的現(xiàn)象.DH-PSF是一種三維光學響應(yīng),具有隨離焦量不斷旋轉(zhuǎn)的圓形不對稱橫截面輪廓.實現(xiàn)DH-PSF的主要方法是通過位于Laguerre-Gauss(LG)模式平面上特定直線上的LG模式的線性疊加.LG光束模式的線性疊加構(gòu)成自成像光束.LG光束模式為[6]

式中r=(ρ,φ,z)為空間點的柱坐標,ρ?=ρ/ω(z?)是高斯光斑的經(jīng)向坐標,為束腰半徑,z?=z/z0縱向坐標,z0=πω02/λ為瑞利長度,un,m(r)的組成為

將(1,1),(3,5),(5,9),(7,13),(9,17)五個LG模式進行等權(quán)重疊加,形成一個新的光場分布函數(shù),即雙螺旋旋轉(zhuǎn)光束(圖1(a)).基于LG函數(shù)的傅里葉變換不變特性,該函數(shù)如作為光學傳遞函數(shù)應(yīng)用到光學成像系統(tǒng)中,光學系統(tǒng)的點擴展函數(shù)將變?yōu)镈H-PSF,且隨離焦量變化而旋轉(zhuǎn)的速度與LG模式平面上所選取的直線斜率成正比,在聚焦區(qū)速度最大(圖1(c)).一個DH-PSF系統(tǒng)是在標準成像系統(tǒng)的傅里葉平面加入一個特殊設(shè)計的相位板,此相位板是其透射率函數(shù)在傅里葉變化的聚焦區(qū)形成雙螺旋的形式.更特別的是它展示了兩個圍繞著光軸旋轉(zhuǎn)的旁瓣,其中一個繞著光軸順時針旋轉(zhuǎn),而另一個則是逆時針旋轉(zhuǎn).用DH-PSF進行三維納米定位時,分子的橫向定位點通過兩個旁瓣的中點來估計,而其軸向位置則根據(jù)兩個旁瓣中心連線的旋轉(zhuǎn)角度(圖1(b))確定[7].
3 基于FI理論計算DH-PSF的三維定位精度
FI是一種測量隨機變量X與取決于X概率的未知參數(shù)θ的信息量.X的概率函數(shù)也就是θ的似然函數(shù),記作 f(X,θ).似然函數(shù)的對數(shù)對θ的偏導數(shù)叫作得分函數(shù).在特定的條件下,得分函數(shù)的一階矩為0,二階矩為FI,則FI表達式為

圖1 DH-PSF (a)DH-PSF的強度與相位分布;(b)DH-PSF兩個旁瓣的旋轉(zhuǎn)角度與Z軸位置的關(guān)系曲線圖舉例;(c)DH-PSF在不同軸向位置處的圖形

就基于DH-PSF的單分子定位而言,似然函數(shù)就是DH-PSF,感興趣的參量就是單分子的橫向和軸向位置根據(jù)Cramer-Rao不等式,一個未知參數(shù)θ的無偏估計值θ?的變化往往大于或者等于FI逆矩陣[8].

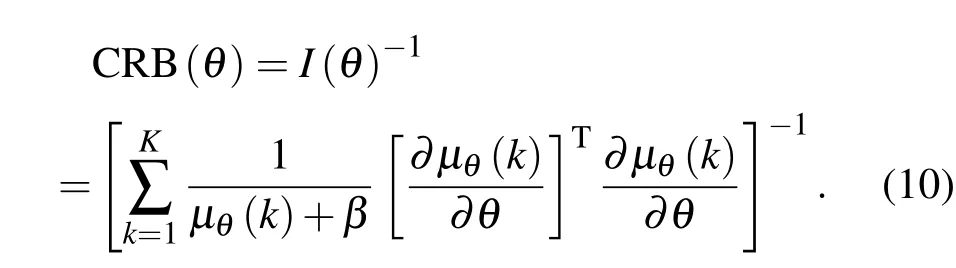
DH-PSF的Cramer-Rao邊界(Cramer-Rao bound,CRB)代表了無偏估計值的最小可能位置的估計方差,通過選擇適當?shù)脑肼暦植?可計算不同信噪比下的CRB.對于單分子的3D定位問題,3D定位精度的極限為FI逆矩陣的對角線元素的平方根,其計算如下[9]:

其中θ=(x0,y0,z0),μθ為PSF在每個像素點上的概率密度函數(shù),β為每個像素點上的泊松背景噪聲,K為總的像素數(shù).
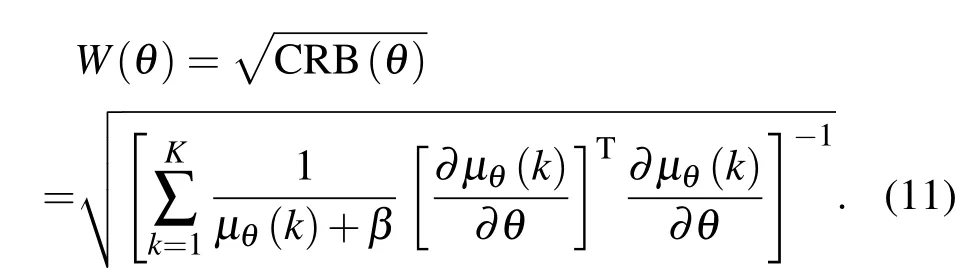
則其光子受限系統(tǒng)中的CRB為
由前面可知3D的定位精度與CRB的平方根是一致的,所以光子受限系統(tǒng)中的三維定位精度表達式如下:
為了計算DH-PSF的FI矩陣,我們必須求解成像函數(shù)的PSF及其偏導數(shù).在基于雙螺旋點擴展函數(shù)的熒光顯微系統(tǒng)中,位于點(0,0,z)處的熒光分子所成的像,即為系統(tǒng)的DH-PSF,其3D-PSF數(shù)學模型如下[10,11]:

把qz(x,y)代入(9)—(12)式得:
i,j=1,2,3;θ∈{x,y,z},N表示總光子數(shù),B為背景噪聲.
為了計算DH-PSF的理論定位精度,我們重點分析了光子數(shù)、背景噪聲、軸向位置對其定位精度的影響.所有的理論定位精度的模擬計算均在Matlab編程環(huán)境下實現(xiàn).模擬參數(shù)如下:熒光波長λ=670 nm,物鏡放大倍率M=100,數(shù)值孔徑N=1.4,探測器像元大小為16μm.通過探測光子數(shù)的不同,可以分別求出其不同的三維定位精度,如圖2(a)所示.由于定位精度與光子數(shù)的開方成反比,所以隨著光子數(shù)的增加,所求得的W(θ)值就越小,也就是其定位精度越高.如圖2(b)所示,光子數(shù)為1000時,通過所加背景噪聲的不同,可以分別求出其不同的三維定位精度.隨著背景噪聲的增加,定位點的分布就越寬,所求得的W(θ)值就越大,也就是其定位精度越低.光子數(shù)為1000和5000時,通過z的取值不同(-1—1μm),可分別求得各個位置處的三維定位精度,如圖2(c)—(e)所示.在x,y軸定位精度上,由于其橫向定位精度與光斑的大小有關(guān),光斑越小其定位精度就越高.在不同的z軸位置上,最中間的光斑最小,旁邊的都隨著離焦而有所增大,所以在中點位置的定位精度最高,隨著中點依次降低;在z軸定位精度上,其定位精度不僅與光斑尺寸有關(guān),還與兩個光斑之間的距離有關(guān),距離越遠定位精度越高.離焦越遠,兩個點之間的距離越大,所以在中點位置的定位精度最低,隨著中點依次升高.通過對軸向及橫向定位精度隨分子所處離焦量的變化曲線可以看到,在焦點位置,橫向定位精度達到最高,而軸向定位精度最低.
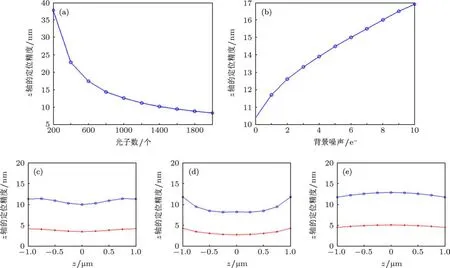
圖2 DH-PSF定位精度模擬圖 (a)不同光子數(shù)情況下的軸向定位精度;(b)不同背景噪聲的軸向定位精度;(c),(d),(e)不同位置處的x,y和z軸定位精度(藍色為光子數(shù)N=1000,紅色為光子數(shù)N=5000)
4 運用誤差傳遞定律計算DH-PSF的三維質(zhì)心定位精度
DH-PSF的軸向質(zhì)心定位精度是由兩個旁瓣相對于軸向距離的旋轉(zhuǎn)角來確定的,根據(jù)其產(chǎn)生原理,可知旋轉(zhuǎn)角θ為[12]
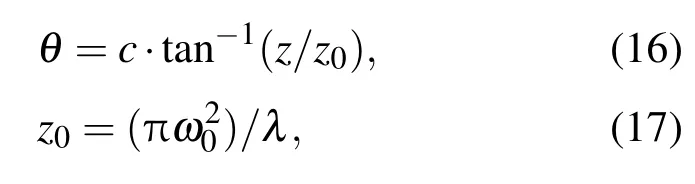
c為在LG模式平面上所取點的斜率,z0為瑞利長度,ω0為束腰半徑.由數(shù)學知識我們可知,兩個點相對于水平方向的夾角為

把(18)式代入(16)式可得:

誤差傳遞函數(shù)定律為[13]
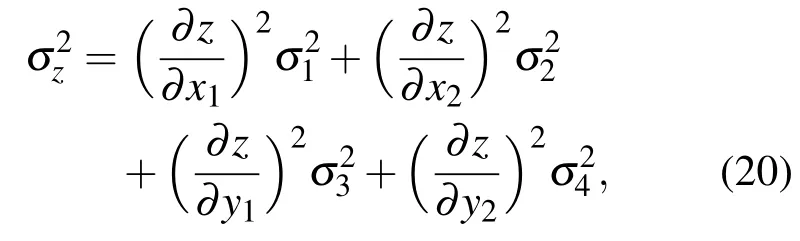
式中σ1(σ2,σ3,σ4)為x1(x2,y1,y2)的標準差,把(19)式代入(20)式則σz為DH-PSF的軸向定位精度.
下面,我們通過計算機進行DH-PSF定位精度的模擬,所有計算均在Matlab編程環(huán)境下實現(xiàn)[14].模擬參數(shù)如下:樣品尺度為12×12個像元,熒光波長λ=670 nm,物鏡放大倍率M=100,數(shù)值孔徑NA=1.4,探測器像元大小為16μm.如圖3(a)所示,源圖像的生成方法如下:首先,通過(1,1),(3,5),(5,9),(7,13),(9,17)五個LG模式疊加得到DH-PSF的圖像;然后,再加上泊松分布的光子散彈噪聲和高斯分布的背景噪聲,最終獲得用于定位的2000幅源圖像.模擬實驗中,背景噪聲均值為2e-/pixel.
圖像重構(gòu)步驟如圖3(b)所示.首先,對上面的源圖像進行濾波降噪;再把圖像分成兩個區(qū)域,分別求得兩個區(qū)域的最大值的坐標,并作為高斯擬合的初值,用高斯擬合質(zhì)心定位算法進行定位,獲得4000個定位點,求得這4000個定位點的標準差,代入(20)式即可求得其軸向的定位精度.
通過上面定位算法所求得的軸向質(zhì)心定位精度與前面計算CRB所得出的FI理論定位精度比較,如圖4所示,藍色為計算CRB所得出的FI理論定位精度,紅色為質(zhì)心定位算法所求定位精度.通過質(zhì)心定位算法求得的定位精度比FI理論定位精度低(誤差數(shù)值高),且在光子數(shù)比較少的情況下差距比較大,但在光子數(shù)比較多時,兩個數(shù)值基本相同.
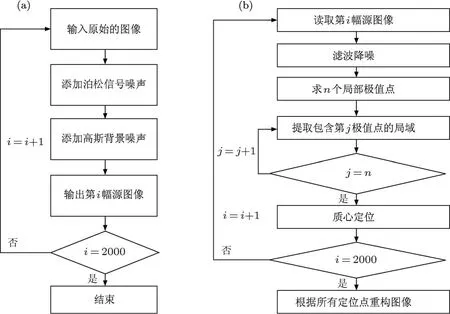
圖3 定位算法步驟原理圖 (a)源圖像的生成;(b)圖像的重構(gòu)
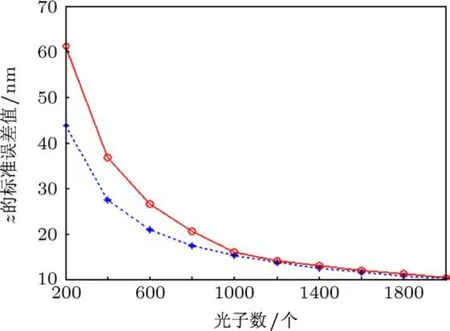
圖4 質(zhì)心定位算法(紅色)所求得的軸向定位精度與計算CRB(藍色)所得出的FI理論定位精度比較
5 總結(jié)與討論
通過對DH-PSFFI矩陣的計算,求得其CRB值,表示了它的FI理論三維定位精度.同樣,根據(jù)質(zhì)心定位算法也求出了其定位精度.兩者相比較可知,運用質(zhì)心定位精度算法求出的定位精度要比直接運用公式計算CRB所得的FI理論定位精度要低;但是,在光子數(shù)大于1000的條件下,二者的差別還是比較小的,基本上一致.由于在光子數(shù)少的情況下,信噪比較差,運用高斯擬合質(zhì)心定位時,造成對質(zhì)心位置的定位偏差過大,從而造成質(zhì)心定位精度算法求出的定位精度標準誤差增大,即定位精度降低;而在光子數(shù)多的情況下,噪聲對質(zhì)心位置定位的偏差較小,因此二者之間的定位精度基本一致.
[1]Chen D N,Liu L,Yu B,Niu H B 2010 Acta Phys.Sin.59 6948(in Chinese)[陳丹妮,劉磊,于斌,牛憨笨2010物理學報59 6948]
[2]Holtzer L,Meckel T,Schmidt T 2007 Appl.Phys.Lett.90 053902
[3]Toprak E,Balci H,Blehm B H,Selvin PR 2007 Nano Lett.7 2043
[4]Pavani SRP,Thompson M A,Biteen JS,Lord SJ,Liu N,Twieg RJ,Piestun R,Moerner WE 2009 PNAS106 2995
[5]Shtengel G,Galbraith J A,Galbraith C G,Lippincott-Schwartz J,Gillette J M,Manley S,Sougrat R,Waterman C M,Kanchanawong P,Davidson M W,Fetter RD,Hess H F 2009 PNAS106 3125
[6]Piestun R,Schechner Y Y,Shamir J2000 JOSA A 17 294
[7]Pavani S R P,Greengard A,Piestun R 2009 Appl.Phys.Lett.95 021103
[8]Thompson M A,Lew M D,Badieirostami M,Moerner WE 2010 Nano Lett.10 211
[9]Ober RJ,Ram S,Ward ES 2004 Biophys.J.86 1185
[10]Badieirostami M,Lew M D,Thompson M A,Moerner WE 2010 Appl.Phys.Lett.97 161103
[11]Ram S,Prabhat P,Chao J,Ward E S,Ober R J 2008 Biophys.J.95 6025
[12]Khonina SN,Kotlyar V V,Soifer V A,Honkanen M,Lautanen J,Turunen J1999 J.Mod.Opt.46 227
[13]Liu Z M 1981 Error and Interpretation of Data(Beijing:Atomic Energy Press)p21(in Chinese)[劉智敏1981誤差與數(shù)據(jù)處理(北京:原子能出版社)第21頁]
[14]Chen D N 2010 Ph.D.Dissertation(Wuhan:Huazhong University Of Science And Technology)(in Chinese)[陳丹妮2010博士學位論文(武漢:華中科技大學)]