基于DSP的柴油發電機組控制系統自動并網模塊設計
2013-09-25 14:12:44閆宏量
電子設計工程 2013年3期
李 琳,趙 宇,閆宏量
(西安石油大學 陜西省鉆機控制技術重點實驗室,陜西 西安 710065)
鉆井現場中,電動鉆機動力系統配套的數臺同步發電機通常會根據鉆井工藝的變化及用電量的需求進行選擇性的并聯運行。并聯運行可以使柴油機和發電機在較高的效率下運行,也可以提高供電的可靠性,并且能夠提高供電質量,對鉆井設備安全性,提高鉆井工作效率有重要意義。隨著技術發展,現在的自動準同期并網裝置大部分以DSP芯片作為數據處理核心,其強大的數據采集和計算能力可以滿足快速性和準確性的要求,同時發電機組控制系統也發展到了使用DSP芯片實現的數字控制階段。但是兩者在硬件上自成一體,因而硬件投資較大,而且硬件接線復雜。文中將自動并網功能作為發電機控制系統的模塊進行一體化綜合設計,以解決此問題。
文中以TMS320F2812為控制核心,在原有開發的柴油發電機組數字控制系統[1]基礎上設計了自動并網模塊。該模塊可以實現安全可靠的自動并網操作,并且具有快速、準確等特點。
1 自動并網模塊工作原理
進行并列操作時,為了使瞬時沖擊電流不影響電網,需要在理想條件下發出并網信號[2]。理想條件如下:
1)待并網發電機的電壓和母線電壓大小相等。
2)待并網發電機的電壓和母線電壓相位相同。
3)待并網發電機的頻率和母線頻率相等。
4)待并網發電機的相序和母線相序相同。
在發電機并網時,任意一項條件不滿足都不能發出并網信號。在實際的并列操作中,并列的實際條件允許有一定的偏差,即準同期條件。發電機實際并網時的準同期條件為:
通常狀況下滿足上述偏差時,即可保證在并網瞬間不會引起較大的電流沖擊。自動并網模塊在接收到上位機發出的并網指令時,開始實時采集發電機和電網并列的所需參數,并對所采集到的參數進行分析計算,當壓差和頻率差不符合上述準同期條件時,利用自動調節部分調節發電機電壓和轉速。通過調節使壓差和頻率差滿足要求,然后根據采集到的相位差快速捕獲合閘時機,在兩電壓向量重合之前一定時間(越前時間)發出合閘指令,完成并網操作。
2 并網模塊的整體設計
并網模塊主要包括并網參數的采集,參數的分析計算,電壓、轉速的自動調節,合閘信號的發出,與上位機的通訊以及參數的顯示。參數采集部分主要使用電壓轉換、濾波及調理電路將發電機端和電網端的電壓信號轉化為DSP可以直接采集的信號。DSP通過ADC模塊完成對電壓的采集,并且利用事件管理器(EV)的捕獲單元完成對兩者頻率和相位差的采集。DSP對參數進行分析計算,當壓差與頻率差不滿足時,通過D/A輸出控制電壓和轉速的自動調節使其滿足并網要求;當條件滿足時則捕捉時機發出合閘脈沖信號,通過合閘控制電路完成并網。DSP利用內置的CAN控制器與發電機組控制系統的通信單元[3]完成與司鉆臺PLC的通訊。司鉆臺PLC通過總線對發電機控制系統進行控制,使發電機組可以高效的適應整個井場的用電量變化,從而完成對井場的整體控制優化。
并網模塊結構圖如圖1所示。
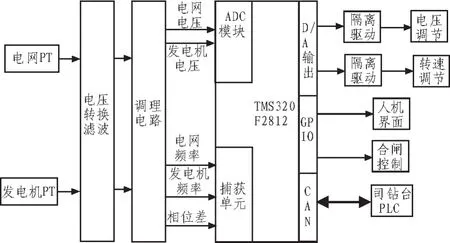
圖1 并網模塊結構圖Fig.1 Grid-connected module structure
3 并網模塊的硬件設計
該自動并網模塊主要應用了DSP和CAN總線技術,采用了TI公司的TMS320F2812芯片。該芯片為32位定點芯片,具有強大的數字信號處理能力,并且還具有較為完善的事件管理能力和嵌入式控制功能,因此被廣泛應用于工業控制領域。該芯片內置事件管理器(EV),A/D轉換器及豐富的I/O控制引腳,可以方便地實現對并網所需的電壓、頻率、相位差等參數的檢測。其強大的計算能力保證系統可以快速準確地進行信息分析,發出調壓、調頻指令,計算合閘時機實現斷路器合閘。該模塊需要接收外界的模擬信號、開關量信號以及上位機的通信信號,因此利用芯片內置的CAN控制器設計了與上位機的通訊接口,并且設計了顯示模塊[4]。
3.1 參數采集
并網模塊的主要參數來自發電機組和電網的電壓信號,電壓差、頻率差以及兩者之間的相位角的計算信號源都來自電壓信號。
1)電壓的檢測
電壓參數的檢測主要是通過傳感器和模數轉換模塊ADC實現的。傳感器將電網和發電機端電壓PT的信號轉換為0~3 V的電壓信號接入ADC中,進行數據采集即可獲得兩者的電壓。
2)頻率和相位差的檢測
頻率和相位差的檢測是將電網和發電機端電壓經過傳感器獲得的正弦信號送入電壓比較電路,比較器將兩路信號轉換為各自周期不變的方波,接入DSP的捕獲單元,這樣可以得出各自的頻率。對兩路方波信號進行異或運算,可得到兩者的相位差。比較電路如圖2所示。
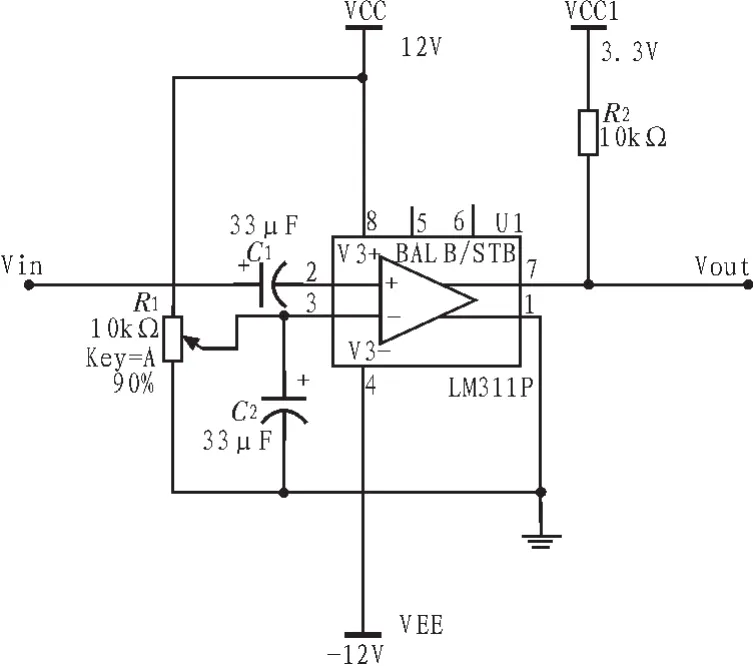
圖2 電壓比較電路Fig.2 Voltage comparison circuit
3.2 合閘控制
并網過程中,自動并網模塊需要準確、可靠地發出合閘脈沖信號,合閘脈沖信號經中間繼電器驅動并列斷路器快速合閘并網。考慮到斷路器觸點從斷開狀態過度到閉合狀態需要走過一段行程,因此需要一定的時間,即斷路器合閘時間tQF,只要這段時間內頻率差不等于零,則這段時間內的相位差變化量為:

為了保證斷路器觸點閉合瞬間相位差等于零,就要求并網模塊發出合閘命令時的相位差δ應滿足:

由此得并網模塊的合閘原理:即根據當前頻率差和斷路器的合閘時間計算合閘越前角,并在當前相位差等于合閘越前角時發出合閘命令。由于用相位差作為合閘判據,所以稱為越前相角原理。注意到此越前相角并不恒定,而是隨頻率差變化而變化,所以這種控制器總是根據變化的頻率差不斷的修正越前相角。雖然越前角不恒定,但越前時間卻是恒定的,它等于斷路器的合閘時間,所以也稱為恒定越前時間原理。文中設計的斷路器合閘脈沖放大電路原理圖如圖3所示。
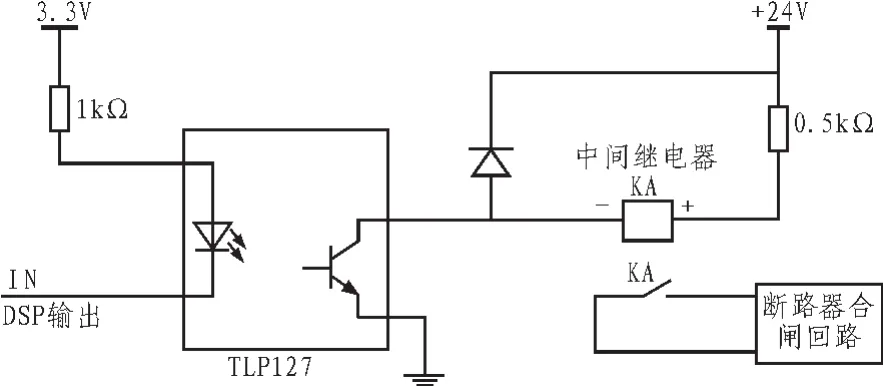
圖3 合閘脈沖放大電路Fig.3 Switching pulse amplification circuit
4 自動并網模塊軟件設計
自動并網模塊的軟件部分主要完成參數的分析計算、并網條件的判斷以及條件符合時合閘信號的發出。其主要工作是對采樣獲得的發電機端和電網端的電壓、頻率以及相位進行計算比較,在此基礎上預測合閘時機并發出合閘信號。
并網控制程序流程圖如圖4所示,模塊實時檢測并網條件,在接收到上位機發出的并網請求信號時進行計算,首先計算發電機端和電網端的電壓差和頻率差是否滿足并網需求,如不滿足則進入相應調節模塊對其進行調整,待兩者都滿足后進行合閘越前角和相位差的計算,捕捉最佳合閘時機發出合閘信號。
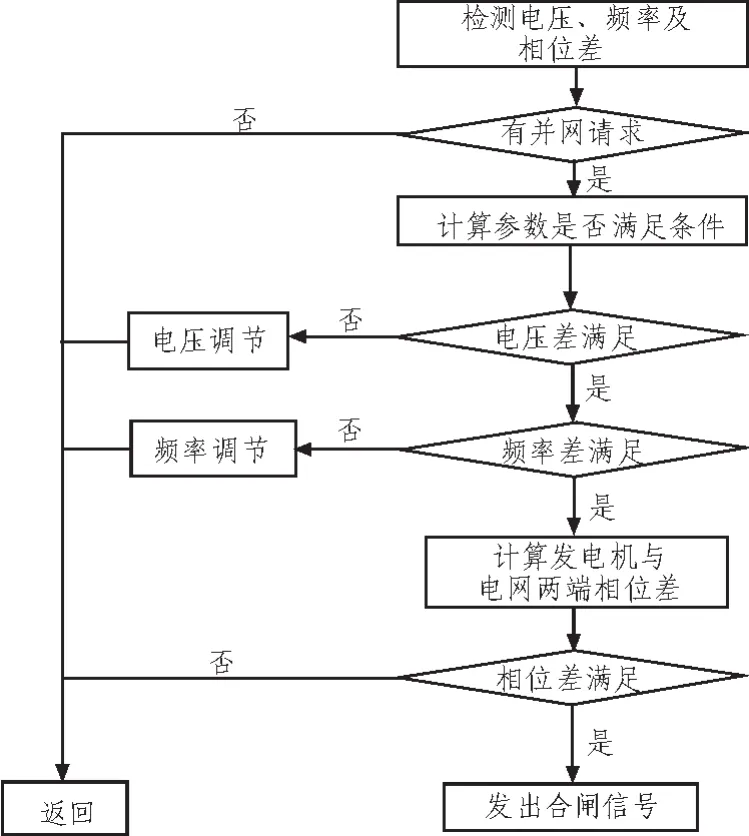
圖4 并網控制程序流程圖Fig.4 Flow chart of grid-connected control program
5 結束語
文中介紹了一種利用TMS320F2812芯片實現的柴油發電機組控制系統中的并網模塊。該模塊作為控制系統的一部分可以使用仿真器在CCS開發環境下進行軟硬件調試。
該模塊可以替代并網裝置實現快速、準確的并網,節省了硬件資源,并且總線接口及通訊功能為以后在現有系統上添加功率均衡及自動保護等功能模塊,實現整個控制現場的優化提供了便利。
[1]呂海衛,李琳.基于DSP的柴油發電機組數字控制器設計[J].電機與控制應用,2008(3):41-44.
LV Hai-wei,LI Lin.Design of digital controller in diesel generating set based on DSP[J].Electric Machines&Control Application,2008(3):41-44.
[2]張奇志,李琳.電動鉆機自動化技[M].北京:石油工業出版社,2006.
[3]申小會,李琳.電動鉆機柴油發電機組控制系統通信單元設計[J].電子設計工程,2010(2):29-30.
SHEN Xiao-hui,LI Lin.Communication module design of electrically operated drilling machine diesel dynamo control system[J].Electronic Design Engineering,2010(2):29-30.
[4]張奇志,康杰.柴油發電機組DSP控制系統人機界面設計[J].現代顯示,2012(1):5-8.
ZHANG Qi-zhi,KANG Jie.Design of human machine interface fortheDSPcontrolleddieselgeneratorset[J].AdvancedDisplay,2012(1):5-8.
[5]TexasInstrumentsTMS320F2810,TMS320F2812 Digital Signal Processors Data Manual[P].2003.
[6]蘇奎峰,呂強,耿慶鋒,等.TMS320F2812原理與開發[M].北京:電子工業出版社,2005.
[7]閆宏亮.TMS320F2812 DSP在柴油發電機組頻率測量中的應用[J].現代電子技術,2009(3):103-104.
YAN Hong-liang.Application of TMS320F2812 DSP in frequency measurement of diesel generating set[J].Modern Electronics Technique,2009(3):103-104.
猜你喜歡
故事作文·高年級(2021年12期)2021-12-21 02:32:35
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
電力工程技術(2014年1期)2014-03-20 14:19:06
