載波相位平滑偽距算法研究與精度分析
2013-09-25 14:13:08隋葉葉楊小江
電子設計工程 2013年8期
隋葉葉,楊小江,柳 濤
(航天恒星科技有限公司 北京 100086)
偽距定位法是指利用偽距及廣播星歷的衛星軌道參數和衛星鐘差改正進行的定位。由于衛星時鐘誤差一般為3 m左右,均方差約為2 m,偽距觀測噪聲為30 cm,廣播星歷的軌道精度為m級,衛星鐘差的改正精度為幾十納秒,因此在高動態條件下,單點定位的坐標分量精度通常在10 m左右。而結合偽距確定周整模糊度的非差精密單點定位的精度可達2 cm[1-5],但是由于載波相位存在周整模糊度問題,因此實現較為復雜。而載波相位平滑偽距將偽距無周整模糊度與載波相位觀測量高精度的特點相結合進行單點定位,能夠有效提高偽距精度,且實現方法簡單,更加適合在空間飛行器上使用。
文中提出一種基于載波差量進行周跳探測的方法,根據衛星、飛船的軌道特點,選擇合理的偽距/平滑偽距解算切換策略與周跳處理方式,并對參數的確定進行仿真分析,解算出航天器的位置信息。該方法實現簡單,并能夠可靠地檢測周跳,保證定位結果的平滑并有效提高定位精度。
1 定位精度影響因素分析
由GPS確定的位置、時間解的精度最終表示為幾何因子和偽距誤差因子之積。粗略地講,GPS解的誤差用下式來估計[6]:
(GPS解的誤差)=(幾何因子)×(偽距誤差因子)在適當的假設條件下,偽距誤差因子就是偽距值的實際精度。而幾何因子表示衛星/用戶的相對幾何布局對GPS解的誤差的復合影響,一般地,將它稱做與衛星/用戶幾何布局相關聯的幾何精度因子。
GPS標準定位服務的偽距誤差(m)估算表如表1[6]所示。
由表1可以看出,偽距誤差一般在7 m左右,在單點定位誤差中占有很大比重。采用載波相位平滑偽距的方法,可以消除偽距噪聲,改進偽距誤差,從而有效地提高單點定位精度。因此,文章對載波相位平滑偽距算法進行研究,并對高動態環境下算法的適用性進行分析。
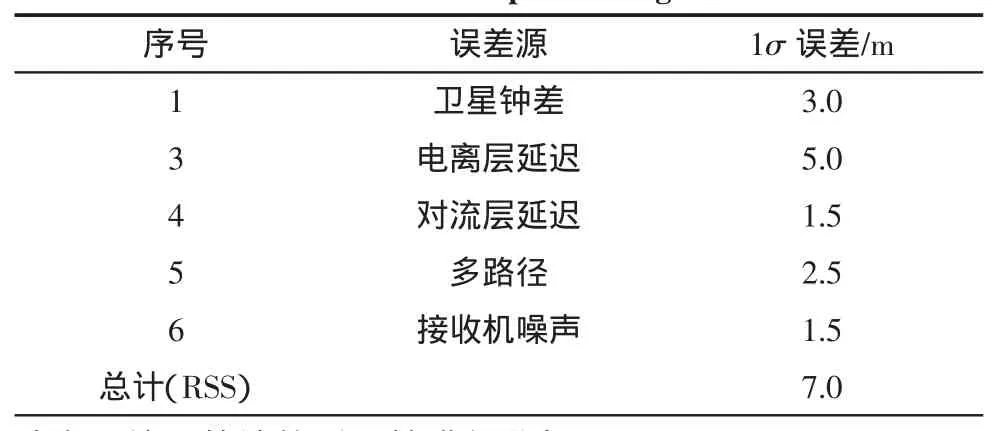
表1 偽距誤差源Tab.1 Sources of pseudorange error
2 載波相位平滑偽距原理
目前GPS接收機實時導航解采用的大多是偽距定位。但偽距觀測值由于其本身的精度比較低,如果直接帶入單點定位的觀測方程中進行求解的話也會降低定位結果的精度,所以一般不用來直接進行求解。雖然載波相位測量的精度比偽距測量的精度高兩個數量級,但載波相位周整模糊度無法直接測得,所以也難以直接利用載波觀測值。如果能用載波相位觀測值對偽距觀測值進行修正的話,就可以提高偽距定位的精度。這就是所謂的相位平滑偽距。
載波相位平滑偽距的方法是利用高精度的載波相位觀測值改善偽距觀測值的精度。在忽略觀測誤差的條件下,其數學模型中所表示的偽距與載波相位觀測值之間的關系如下:

其中:ρ為偽距,φ為載波相位,N為初始周整模糊度,λ為載波波長。
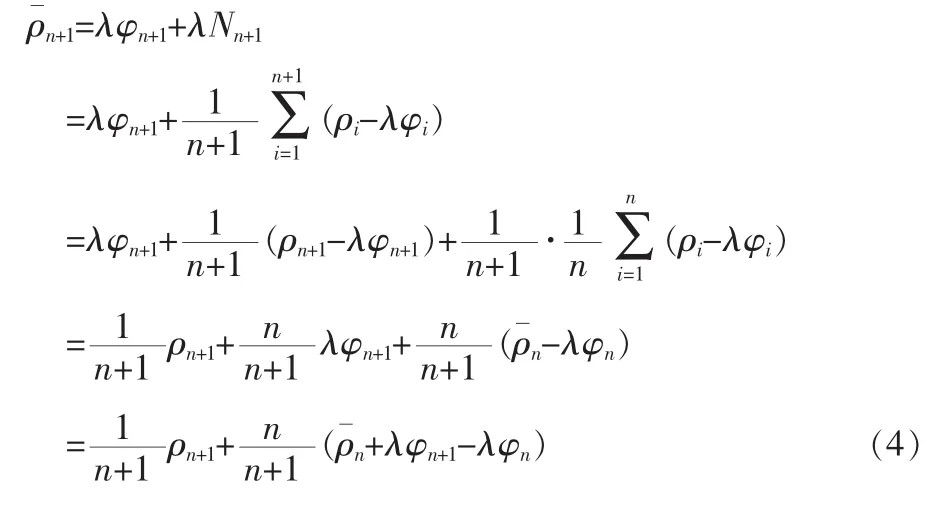
觀測過程中若不存在周跳,則N保持不變,接收機自動對載波相位φ連續計數。設接收機對某顆導航星連續跟蹤n個歷元,有則可得周整模糊度近似為采用遞推算法,n+1時刻的平滑偽距為


3 載波相位平滑偽距單點定位軟件設計
由于GPS導航星座的變化、障礙物的遮擋、接收機的運動、較低信噪比及接收機故障,導航定位過程中,可見星的變化與周跳現象時有發生。在載波相位平滑處理中,如何對這些特殊情況進行處理將直接影響到平滑的效果及定位精度。
載波相位與碼偽距觀測量之間有如下關系[7]:

其中λ為載波波長;CP1、CP0分別為k+1、k時刻的載波觀測量,單位為周;PR1、PR0分別為k+1、k時刻的偽距觀測量。
基于此,可以采用如下的周跳處理方式:令

該量體現了相鄰兩個歷元間的載波觀測量的連續性,稱為載波差量。將該量做為k+1時刻是否發生周跳的判決依據。
在該平滑算法中,設定周跳判斷門限,對于載波差量超出此判決門限的歷元,認為該時刻發生周跳。若一顆星連續發生周跳的次數很小,則認為之前的平滑數據仍然有效,跨越該時刻繼續平滑;否則,歷史數據無效,對平滑器進行重置,使用該時刻的偽距測量值ρ1來初始化即

反之,若載波差量在周跳判決門限之內,則按沒有周跳進行處理。且載波差量越小,說明載波的連續性越理想,此時刻的平滑偽距較偽距原始觀測量越可信。因此設定一個小門限,對于載波差量在小門限之內的衛星,選擇平滑后的偽距參與解算;否則,平滑偽距僅保存而不做解算。
另外,偽距平滑窗口也應該合理取值。滑動窗口太大,則當前時刻的偽距觀測量在平滑偽距中占很小的權重,因此考慮到相位誤差的累計變化,可能導致定位結果的發散;滑動窗口過小,則載波相位對平滑偽距的貢獻也相應減小,從而對平滑效果造成影響。
4 算例分析
根據GPS載波相位平滑偽距的原理,就是以小尺度的相位觀測值平滑大尺度的碼偽距觀測值,以達到提高精度的作用。因此,與信號傳播有關(對流層折射、電離層折射、相對論效應及多路徑效應)的誤差項,都以載波相位觀測值所達到的精度為平滑偽距精度;平滑過程的改正量又是第i與i-1次相位觀測值的差分過程,使得與接收機、測站和衛星有關的相近誤差得以削弱或抵消,從而達到平滑偽距較C/A碼偽距精度得以改善的目的。
為更加有效地驗證算法在實際應用中的特性,測試數據選用周跳、變星次數較多的動態數據。
4.1 實驗條件
算例數據采用2012年2月1日的高動態實測數據。數據提供CA碼及L1載波相位測量值,采樣間隔為1 s,觀測歷元取3 600 s。導航文件采用IGS提供的該天的廣播星歷,星歷每2小時更新一次。以事后處理所得的精密定軌數據作為基準值。偽距平滑后的計算結果與基準值進行分析比較,得出分析結果。
4.1.1 數據特性
各歷元的可視星數目與PDOP值、定位誤差(單位為m)曲線圖分別如圖1、2。
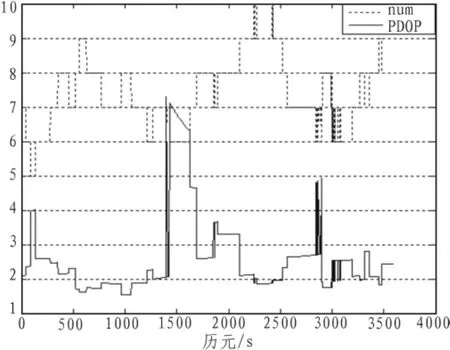
圖1 可視衛星數與PDOPFig.1 Satellite numbers and PDOP
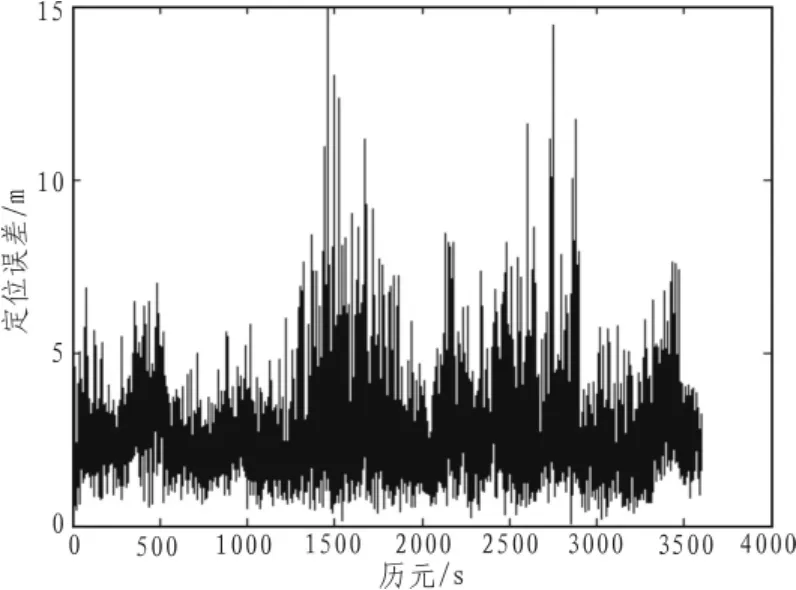
圖2 定位誤差曲線Fig.2 Positioning error plot
為了更加清晰地對比PDOP與定位結果的變化關系,將前200歷元時刻兩者的變化曲線放大如圖3。
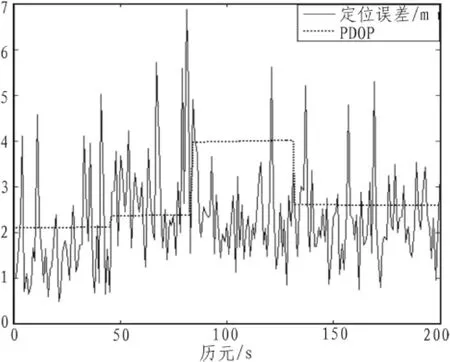
圖3 PDOP與定位誤差的對比Fig.3 The comparison of PDOP and positioning error
由圖3可以看出,定位誤差曲線并不隨著PDOP曲線的變化而變化。即使在PDOP值不變的情況,定位誤差也有可能出現較大抖動。說明在該測量數據作為輸入時,衛星的幾何分布對定位精度幾乎不產生影響[8],定位精度的變化主要是受新上/下星的偽距精度的影響。因此,如何處理新上/下星,對定位精度將產生直接的影響。
4.1.2 參數取值確定
該平滑技術雖然能夠簡單有效地實現周跳檢測及偽距平滑,但是平滑參數的選擇需要適應不同的應用環境。本節針對在該組原始數據條件下,周跳判斷門限和偽距平滑窗口的取值進行分析確定。
偽距平滑窗口取適中值400時,不同的周跳門限取值對定位結果的影響如表2所示。

表2 周跳門限取值分析Tab.2 Cycle slip threshold value analysis
周跳門限過大,容易漏判,從而引入誤差較大的點做平滑,使得平滑結果整體偏離;周跳門限過小,容易誤判,從而載波相位得不到充分的利用,影響平滑效果。由上表2可以看出,在周跳門限大于15時,定位結果不再隨它的變化而改變。周跳門限為10時,定位誤差均方差接近最小值。
在周跳門限取值確定的基礎上,表3顯示了平滑窗口對定位精度的影響。
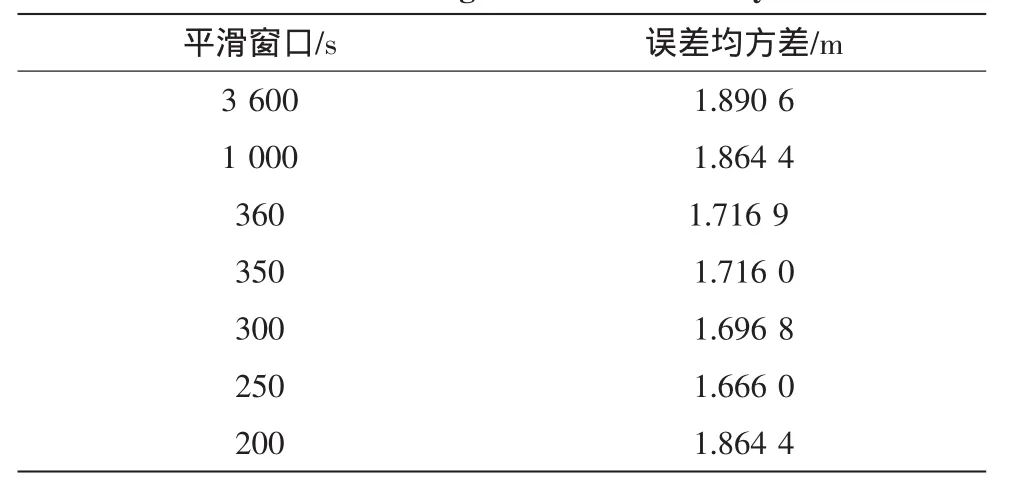
表3 平滑窗口取值分析Tab.3 Smoothing window value analysis
由上表可以看出,在平滑窗口為250時誤差均方差達到最小值,所以在該算例分析中,平滑窗口大小取250合適。
4.2 定位精度分析
當偽距未被載波相位平滑時,單點定位的三軸分量偏差如圖4。
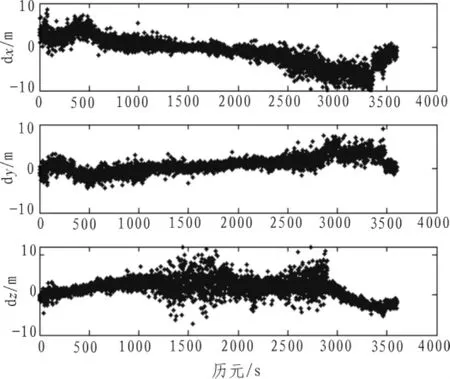
圖4 C/A碼定位三軸分量偏差Fig.4 Three-axis component deviation of C/A code positioning
圖4中,定位誤差的隨機噪聲較大,誤差范圍在±10 m以內,誤差的均方差為2.3 m。偽距采用載波平滑之后,單點定位的三軸分量偏差如圖5。
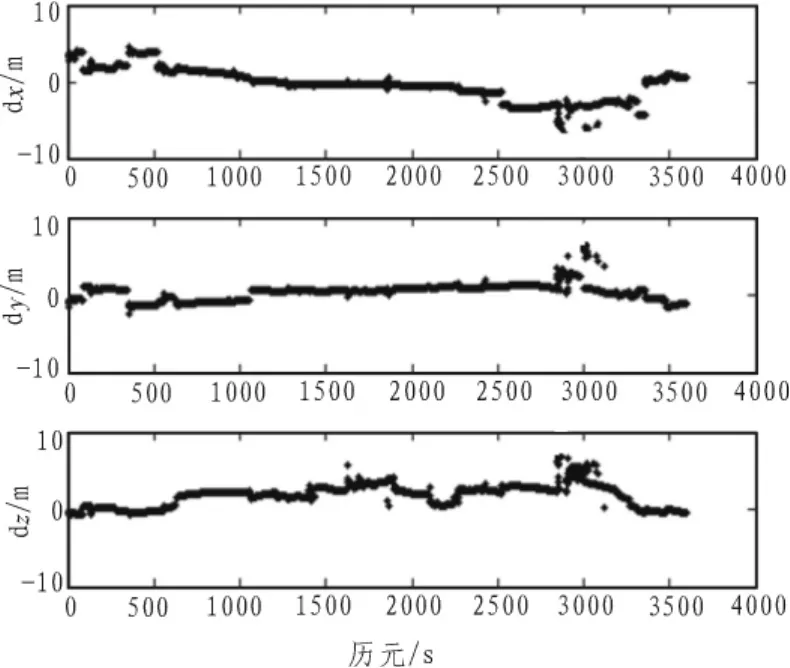
圖5 C/A碼平滑偽距定位三軸分量偏差Fig.5 Three-axis component deviation of smoothing code pseudorange positioning
對比圖4、圖5可以看出,圖5中定位精度有明顯改善,隨機噪聲明顯減小,且定位誤差在±5 m以內,誤差的均方差為1.7 m。
4.3 平滑偽距相關分析
為了從統計意義上分析平滑的效果,選取沒有周跳的一段數據進行分析。以十四號星為例,取一段十分鐘的無周跳數據進行仿真分析。
如圖 6,圖(a)、(b)、(c)分別顯示偽距與載波差量、平滑偽距與載波差量、平滑偽距與偽距差量曲線。其中,為了更加便于圖形的分析,圖a、b顯示的均是消去均值之后的效果。
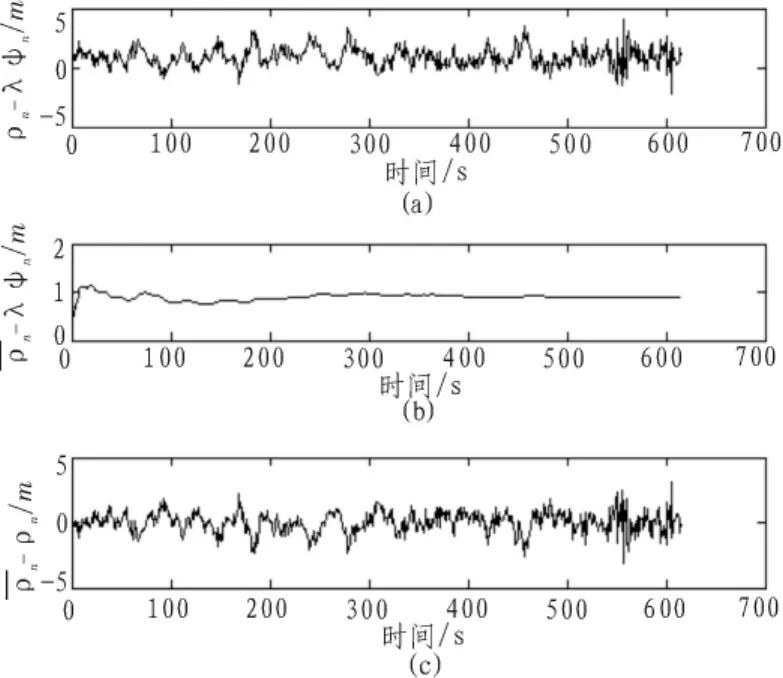
圖6 十四號星相關差量曲線Fig.6 Related differential curve of 14th star

另外,σ2(-λφn)比 σ2(ρn-λφn)小很多,說明平滑后的偽距偏差很小,且平滑后的偽距更趨近于載波相位觀測量,這也證明了平滑的有效性。
5 結 論
通過對以上測試數據分析可以看出,在高動態條件下,偽距定位法的定位精度為10 m。而通過載波相位平滑偽距處理之后,定位精度明顯提高,定位誤差在5 m之內。從統計結果也可以看出,平滑之后的偽距精度更加趨近于載波精度,該平滑方法在高動態環境下具有良好的平滑效果。文章還確定了在該高動態環境下,平滑窗口、周跳門限的合理取值,為高動態環境平滑偽距技術應用時參數的確定提供了參考。
[1]吳江飛,黃城.GPS精密單點定位模型及其應用分析[J].大地測量與地球動力學,2008,28(1):96-100.
WU Jiang-fei,HUANG Cheng.GPS precise point positioning models and the utility analysis[J].Journal of Geodesy and Geodynamics,2008,28(1):96-100.
[2]郝明,丁希杰.GPS精密單點定位的數據處理方法綜述[J].測繪工程,2008,17(4):60-62.
HAO Ming,DING Xi-jie.Study of data processing methods for GPS precise point positioning[J].Engineering of Surveying and Mapping,2008,17(4):60-62.
[3]Gao Y.Development of a real-time single-frequency precise point positioning system and test results[C]//Pro-ceedings of ION GNSS 2006,Fort Worth,TX,2006:26-29.
[4]Hyumho R,et ai.Dual-frequency GPS precise point positioning with WADGPS corrections[C]//Proceedings of ION GNSS 2005,LongBeach,CA,September,2005:13-16.
[5]唐衛明,劉智敏.GPS載波相位乎滑偽距精度分析與應用探討[J].測繪信息與工程,2005,30(3):37-39.
TANG Wei-ming,LIU Zhi-min.Precision evaluating and applications of GPS code pseudorange smoothing algorithm based on carrier observables[J].Journal of Geomatics,2005,30(3):37-39.
[6]Kaplan E D,Hegarty C J.Understanding GPS:principles and applications,second edition[M].Normood,MA:Artech House,2006.
[7]謝鋼.GPS原理與接收機設計[M].北京:電子工業出版社,2009.
[8]徐峰,張少博,陳海峰.發動機熱試車數據測量誤差分析及處理方法[J].火箭推進,2012(4):72-75.
XU Feng,ZHANG Shao-bo,CHEN Hai-feng.Error analysis and processing of engine hot test data[J].Journal of Rocket Propulsion,2012(4):72-75.