基于ARM太陽能光伏板自動跟蹤系統的設計
2013-09-25 14:13:18袁志遠
電子設計工程 2013年8期
關鍵詞:系統
朱 宇,袁志遠
(西安科技大學 計算機科學與技術學院,陜西 西安 710054)
隨著社會的發展,社會對新能源的需求越來越太,而太陽能以儲量豐富、普遍存在、環保無污染占據相當的優勢,所以對太陽能的開發利用具有重大意義。然而常規的太陽能發電的方式是將太陽能電池板固定在某一位置,對太陽能進行采集,平均光伏轉換效率較低,并且一臺嵌入式系統只控制一塊太陽能光伏板,極大的浪費了資源。本設計采用ARM11作為控制系統,控制多個太陽能光伏板,通過對光敏電阻的采集和比較,控制電機調整太陽能板的位置。實現太陽能光伏板自動跟蹤太陽的功能,使太陽能光伏板能自動對著太陽,從而提高光伏發電系統光伏轉換的效率。同時為了減少電機對電能的消耗,本系統兼顧了電機間歇工作方式,每個太陽能光伏板每25分鐘調整一次與太陽的左右對應,每二周調整一次與太陽的上下對應。
1 基于ARM太陽能光伏板自動跟蹤系統整體結構
如圖1所示是基于ARM11的嵌入式光伏板自動跟蹤系統的整體框圖,該系統設計成雙軸自動跟蹤,自動跟蹤太陽的強度,使太陽光垂直入射在太陽能光伏板的表面以獲取最大發電效率,本系統主要由葵花太陽能光伏板、光敏電阻、放大器、光電二極管、電機[1]、電機驅動芯片、減速器、立體支架和ARM11組成。系統通過比較光敏電阻的大小,由ARM11發出命令給電機驅動器,驅動電機向阻值大的一端自動旋轉。第一步比較左右2個光敏電阻的阻值,通過調整直到2個光敏電阻的阻值相等時,停止左右旋轉;第二步比較水平上方的電阻的阻值與左右方向的其中一個電阻的阻值,通過調整直到兩個光敏電阻的阻值相等時,停止上下旋轉;從而使多個葵花太陽能光伏板與太陽光保持最佳角度 (第二步2周運行一次)。
2 太陽能光伏板自動跟蹤器的組成及工作原理
太陽能光伏板自動跟蹤器[2-3]由ARM11,電機驅動芯片和相關電路組成。ARM11系統主要組成部分如圖2所示。它主要是通過接收光敏電阻值,比較左右2個光敏電阻大小,得到兩阻值之差,經過系統的簡單處理,由系統發出命令給對應的電機驅動器,電機帶動光伏板旋轉到左右兩個光敏電阻的阻值相等的位置,然后再比較水平上方的電阻阻值與左右方向的其中一個光敏電阻阻值的大小,得到兩阻值之差,經過系統的簡單處理,由系統發出命令給對應的電機驅動器,電機帶動光伏板旋轉到水平上方的電阻阻值與左右方向的其中一個光敏電阻的阻值相等的位置,電機停止旋轉。從而實現光伏板自動跟蹤太陽的功能。
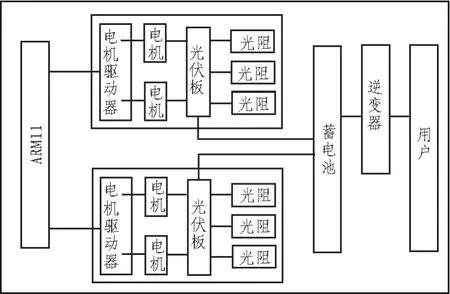
圖1 基于ARM11的嵌入式光伏板自動跟蹤系統的整體框圖Fig.1 Based on the ARM11 embedded photovoltaic panels automatic tracking system overall block diagram
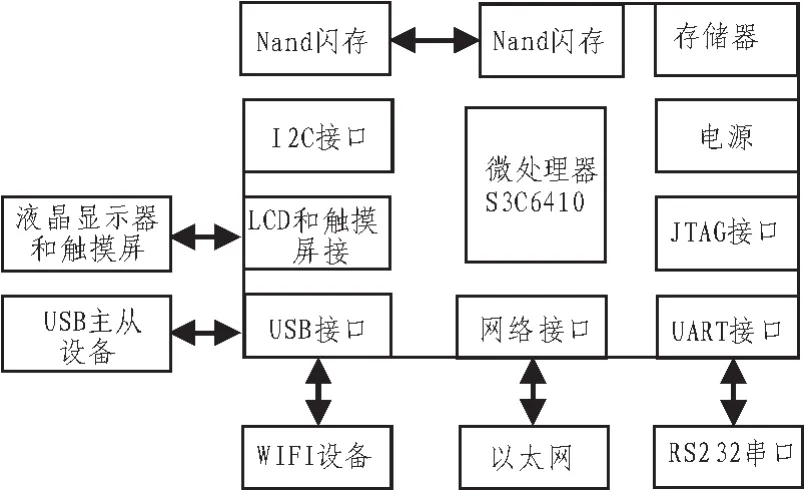
圖2 ARM核心版模塊圖Fig.2 ARM core module diagram
3 太陽能光伏板支架控制器的組成及工作原理
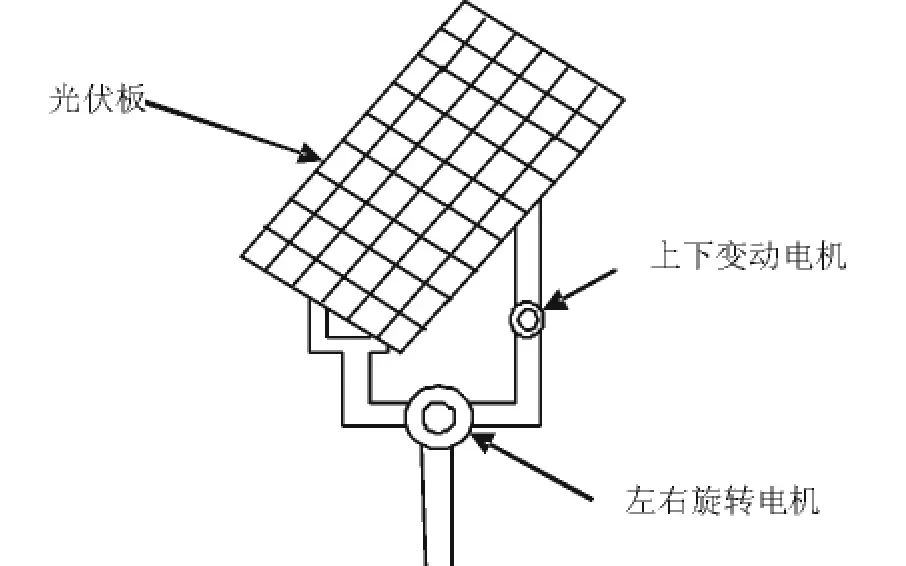
圖3 太陽能光伏板支架控制器結構圖Fig.3 Solar panel bracket structure diagram of the controller
如圖3所示是太陽能光伏板支架控制器結構圖,支架控制器由光敏電阻傳感器、放大器,光電二極管,電機組成。每個太陽能光伏板需要3光敏電阻傳感器。左右2個光敏電阻傳感器為一組,上方的光敏電阻傳感器與左右2個光敏電阻傳感器中的其中一個為一組。每隔25分鐘系統就會比較左右2個光敏電阻傳感器的阻值,經過系統簡單的處理,把命令發給對應的光敏電阻傳感器對應的電機驅動器,驅動對應的電機旋轉,當左右2個光敏電阻傳感器的阻值相等時,停止旋轉,并休息25分鐘;每隔2周系統就會首先比較左右兩個光敏電阻大小,根據比較的結果,由控制系統把命令發給光敏電阻傳感器對應的電機驅動器,驅動對應的電機旋轉,當左右2個光敏電阻傳感器的阻值相等時,停止左右旋轉;接著比較水平上方的電阻阻值與左右方向的其中一個光敏電阻的阻值的大小,根據比較的結果,由控制系統發出命令給對應的電機驅動程序,直到調整到兩個阻值的大小相等時,控制上下方向的電機停止旋轉,并休息2周;實現太陽能光伏板自動跟蹤[4-5]太陽。
4 系統的硬件設計
如圖4所示是電機驅動模塊設計圖,為了提高太陽能光伏板自動跟蹤系統的靈敏性,充分發揮ARM11的性能[6],更好的展現一機多能的優點,本設計在電機驅動器里嵌入了芯片,使單個太陽能光伏板成為一個獨立的靈活的個體,同時又都在同一個ARM11系統的控制下。每個電機驅動芯片不但能完成驅動電機實現光伏板跟蹤太陽的能力,同時還能隨時向ARM11系統傳輸實時數據,也能從ARM11系統那里接受命令和執行命令。每個電機驅動器通過RS-232與ARM11相連接,電機驅動器采用直流供電。
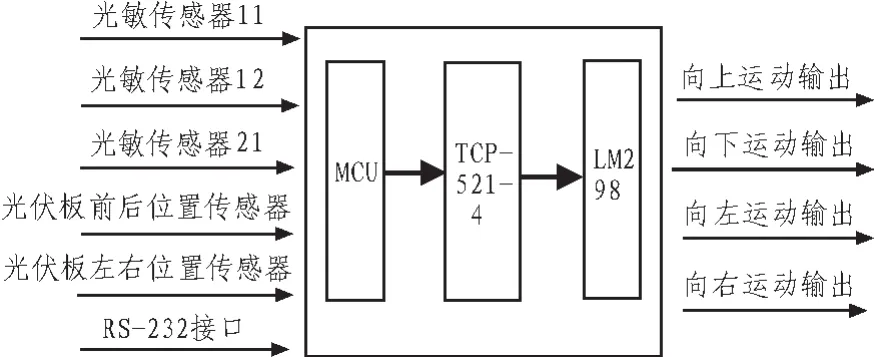
圖4 電機驅動模塊設計圖Fig.4 Motor drive module design
5 系統軟件的實現
如圖5所示是系統控制流程,本系統軟件是采用VC++開發出來的圖像界面,界面友好,操作簡單,支持觸摸操作。開機之后,系統開始自動檢測,識別各個電機驅動器及相應的芯片,一旦發現沒有識別到的電機驅動器會自動報警,并在報警窗口提示沒有識別的電機驅動器的編號;檢測各個驅動器工作狀態,發現工作不正常的驅動器會自動報警,并在報警窗口提示它的編號;系統識別和檢測結束,各個驅動器開始工作,首先獲取左右方向組的光敏電阻的阻值,進行比較,得到大小,系統發出命令給電機驅動器,電機旋轉,當左右阻值相等時電機開始停止工作,并休息25分鐘;每隔2周系統就會首先比較左右2個光敏電阻大小,根據比較的結果,由控制系統把命令發給光敏電阻傳感器對應的電機驅動器,驅動對應的電機旋轉,當左右2個光敏電阻傳感器的阻值相等時,停止左右旋轉;接著比較水平上方的電阻阻值與左右方向的其中一個光敏電阻的阻值的大小,根據比較的結果,由控制系統發出命令給對應的電機驅動程序,直到調整到兩個阻值的大小相等時,控制上下方向的電機停止旋轉,并休息2周;從而實現太陽能光伏板自動跟蹤太陽。
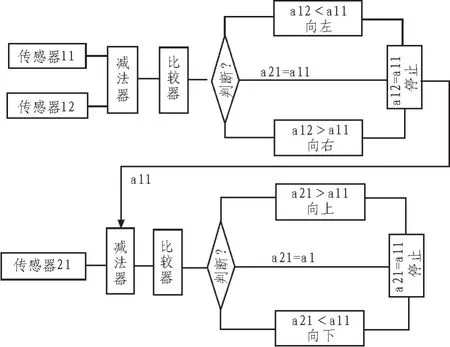
圖5 系統控制流程Fig.5 System control flow
6 結 論
本研究基于ARM11,采用光敏電阻比較法,并結合了3只眼昆蟲識別方向的特點,設計了一機多能自動跟蹤系統,使太陽能電池板自動保持與太陽光垂直。太陽能電池板自動跟蹤太陽光的研究,有效地提高了太陽能的利用率,增加了每天的發電功率輸出,并從整體上降低了太陽能光伏板聯合發電的成本,不但具有很高的經濟效益,而且非常適合社會和經濟發展的要求,應用前景廣闊。
[1]朱衛紅,邢旭輝,王振華,等.異步電動機交-直-交變頻矢量控制的應用和日常維護 [C]//全國冶金自動化信息網2010年年會論文集,2010:755-758.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32