基于T-S模糊模型的電液比例位置控制系統研究
2013-09-25 14:13:08胡金池
電子設計工程 2013年8期
杜 進,胡金池,彭 琦,李 明
(1.西南林業大學 云南 昆明 650224;2.三一重工 黑龍江 哈爾濱 150000)
近年來,隨著電液比例控制技術的發展,憑借著成本低、抗污染能力強等優點,在許多場合逐漸替代了伺服閥,特別是在大型的工程機械中的應用越來越廣泛。電液比例閥能同時實現流量和方向以及壓力的控制,并且可以方便地實現計算機控制。但由于電液比例閥的死區和非線性的特征使其控制要比伺服閥難以控制,而傳統的PID控制由于參數整定困難,工程上很難得到滿意控制效果[1-3]。而T-S模糊模型其本身就是一種非線性的模型,其基本思想是將非線性系統根據實際的情況在合適的工作點對系統進行局部線性化,然后依照相應的解模糊方法對每個線性的輸出結果進行整合,最后輸出系統的控制量,從而實現對非線性系統的控制。
1 系統組成及原理
電液比例位置控制系統主要由油箱1、油缸7、位移傳感器8、電液比例閥6、單向閥4、液壓泵3、溢流閥5、比例放大器10、濾油器2和計算機9組成。系統在工作時,位移傳感器感應出活塞的位置,然后通過數據采集卡將感應到的信號采集并傳遞給計算機,計算機根據當前信號和目標信號計算出誤差的大小和誤差變化率的大小,模糊化程序對誤差和誤差變化率進行模糊化處理,將其轉化為T-S模糊控制器能夠識別的信號,然后將模糊化的結果傳遞給模糊規則庫,推斷出模糊輸出,并將模糊輸出進行解模糊得到精確的控制量。通過比例放大器對控制量進行放大,最后將放大的信號輸給電液比例閥,控制電液比例閥的閥口開度以實現對電液比例系統的流量和壓力的控制,進而實現液壓缸的精確控制。其主要的硬件組成如圖1所示。
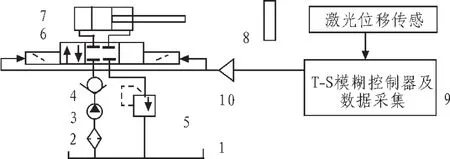
圖1 電液比例位置控制系統Fig.1 Electrohydraulic proportional position control system
2 電液比例閥控液壓缸的數學模型
2.1 閥控缸的模型
本系統采用的電液比例閥是零開口四邊滑閥,4個節流窗口是匹配且對稱的;由于閥腔容積很小,因此,不考慮油液在閥腔內的壓縮。并且閥的響應速度快,即閥芯位移及外負載變化立即會引起負載流量的變化[4]。零開口四邊滑閥的線性流量方程,液壓系統的流浪連續方程,由牛頓第二定律推導出的力平衡方程可寫成:
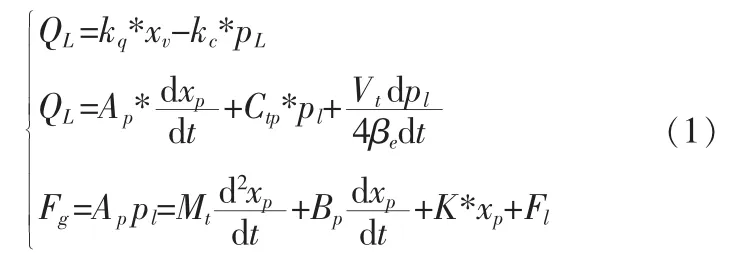
由于本系統沒有負載,因此K=0,并且流量—壓力系數kce很小,粘性摩擦系數Bp也很小,并且本系統是無負載系統,因此(1)式進行拉氏變換并整理可得:
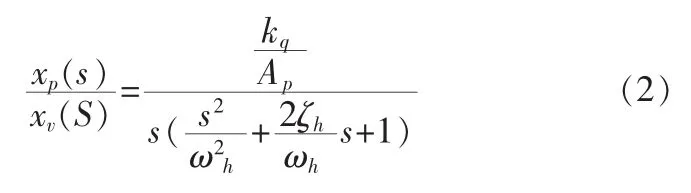
2.2 電液比例閥的傳遞函數
根據實驗得到電液比例閥是一個積分環節與一個二階震蕩環節的疊加,其傳遞函數為:

2.3 位移傳感器和比例放大器的傳遞函數
由于電液比例放大器的轉折頻率比系統的頻寬要高得多,因此電液比例放大器可以視為比例環節。位移傳感器的頻寬也比系統的頻寬要高很多,因此位移傳感器也被看成一個比例環節,位移傳感器和比例放大器的傳遞函數為:

2.4 電液比例位置控制系統的傳遞函數
由(1)~(3)式可以得出電液比例位置控制系統的系統方框圖,如圖2所示。

圖2 電液比例位置控制系統框圖Fig.2 Electrohydraulicproportionalpositioncontrolsystemblockdiagram
由圖2可以推導出電液比例位置控制系統在任何狀態下的傳遞函數:
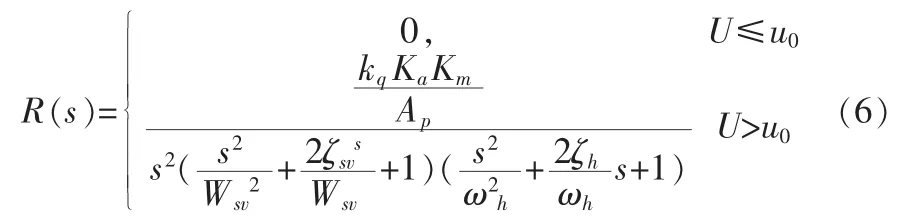
當輸入的控制電壓U小于或等于電液比例閥的開啟電壓u0時,液壓缸沒有動作。當U大于電液比例閥的開啟電壓u0時,系統則變成一個非線性的控制對象。
2.5 主要參數

3 模糊控制器的設計
T-S模糊模型是由Takagi和Sugeno于1985年提出的,T-S模糊模型由模糊化、規則庫、推理機、解模糊幾個部分組成,如圖3所示。當控制系統有輸入信號時,模糊化模塊將輸入信號進行模糊化處理,將輸入信號變成模糊控制器能夠識別的信號,即模糊矩陣A。然后模糊矩陣A依照編寫的模糊規則和模糊推理產生模糊矩陣B。模糊矩陣B就是系統模糊輸出,但此輸出還不能被液壓系統識別,故而還要設計出能讓液壓系統識別的信號,即解模糊過程。通過對模糊矩陣的整合就可以得到模糊控制器對液壓系統的控制信號[5]。
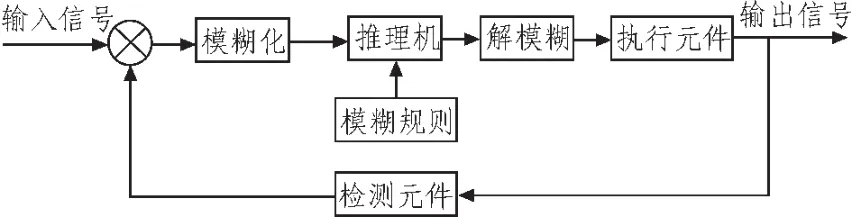
圖3 系統閉環控制結構圖Fig.3 Closed-loop control structure diagram
3.1 隸屬度函數的確定
隸屬度函數是模糊控制器能夠運行的基礎,正確構造隸屬度函數對模糊控制器的控制效果有關鍵性的作用。但到目前為止還沒有一套成熟有效的方法,大多數隸屬度函數的確定都是基于經驗和系統本身特點的。本研究對象為電液比例位置控制系統,為了方便數字信號的實現以及系統本身的特點和算法的效率,文中選擇三角形的隸屬度函數。
根據一般設計控制器的經驗來說,為解決系統響應速度和系統穩定性的矛盾。在設計控制器時,在誤差和誤差變化率較大時,適當地增大控制器的輸出,提高系統的響應速度。在誤差和誤差變化率較小時,適當地減小控制器的輸出,增強系統的穩定性[6]。在T-S模糊控制中,采用變更各個模糊子集對應的模糊規則數目來解決系統響應速度和穩定性的矛盾。換而言之,即在誤差和誤差變化率較大的區域對應較少的模糊規則數目,以提高系統的響應速度。在誤差和誤差變化率較小的區域對應較多的模糊規則數目,以提高系統的穩定性。為使論域中任何一點對應的隸屬度值不能太小,這里使隸屬度的值域為[0.2,1]。因此,隸屬度函數如圖4。隸屬度函數中可以看出,共分為8個模糊等級。為解決在同一個模糊等級中出現不同元素對應同樣的隸屬度的情況,需要對模糊等級左右兩邊進行區分。如圖所示,在相鄰的兩個隸屬度等級中會出現公共元素對于這些公共元素,在本研究中將其歸于前一個隸屬度等級里面。例如:-7屬于NSS,-5屬于NB,以此類推。
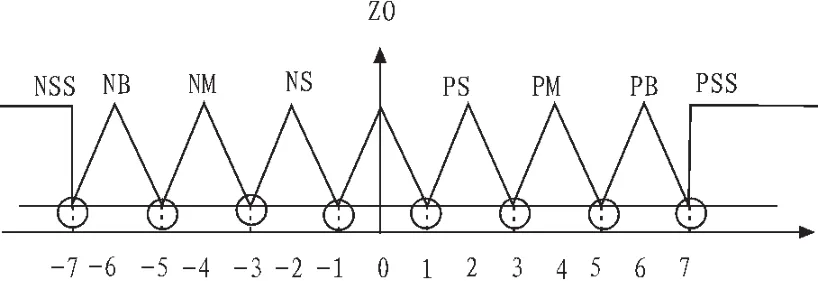
圖4 隸屬度函數圖Fig.4 Membership function diagram
本系統所采用的隸屬度函數可以寫為:

3.2 模糊規則庫的設計
模糊規則庫是模糊控制器的關鍵部分,當前還沒有權威的理論來指導模糊規則庫的構建,現在在模糊規則庫的構建中一般都是從系統本身的特點出發或者根據多年的經驗來指導構建的[7]。這里在構建模糊規則庫采用前一種方法。本系統由兩個部分構成,一個部分是沒有陷入死區時候系統的非線性部分另一個部分為系統輸入信號太小,導致輸出電壓不足以逃出系統的死區,從而出現了有輸入而沒有響應的情況出現。對于這兩種情況需要區別對待。首先,當系統沒有進入死區的時候,即此時的系統就為一個非線性系統。其次,當系統陷入死區的情況。對于非線性部分的模糊規則庫由前件和后件組成,其形式為:

當系統沒有陷入死區,對于模糊規則庫的前件,前件的作用就是將模糊化后的信號進行分類,并確定隸屬度的大小[8]。模糊前件對模糊化后的信號進行劃分的指標有以下幾個:模糊化后的隸屬等級、在隸屬等級中的位置、誤差的隸屬度、誤差變化率的隸屬度。

bn為第n條模糊規則所對應的步長,這個步長是通過實驗得到的。Hi為第i條規則所對應的信號的適合度。適合度的算法為:Hi=ui(e)∧ui(ec)ui(e)為第 i條規則對應信號誤差的模糊子集,ui(ec)為第i條規則對應信號誤差變化率的模糊子集。從模糊后件的形式可以看出,模糊控制器的每一個模糊輸出都是線形的。當系統是非線性時,模糊控制器用線性的輸出來逼近非線性的對象。

模糊規則庫的設計由非線性部分的模糊規則和死區部分的模糊規則構成。當系統在非線性部分的時候,模糊控制器的模糊輸出是用線性規則對非線性的近似。當系統進入死區時,死區模糊規則開始運行,對輸出信號進行校正,跳出死區。
3.3 解模糊
為了使電液比例系統能夠識別模糊控制器的信號要對信號進行處理,即將模糊信號轉化為精確的控制信號。根據電液比例位置控制系統的特點我們采用重心法解模糊。其具體的表達如下:
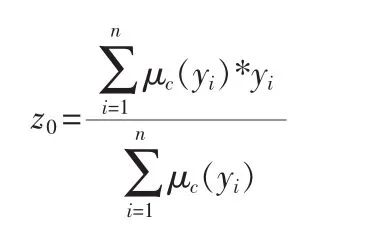
通過解模糊的方法就可以得到給到控制電壓大小,再進行D/A轉換將數字信號轉換成模擬信號即控制電壓,進而控制電液比例閥的閥口開度,從而改變了系統的流量以及系統壓力,以達到精確定位的目的。
4 仿真實例
為了驗證基于T-S模糊模型的電液比例位置控制系統的控制效果,在Matlab中建立電液比例位置控制系統的模型進行仿真實驗。 參考模型的傳遞函數為:d=sin(i)*cos(i)。
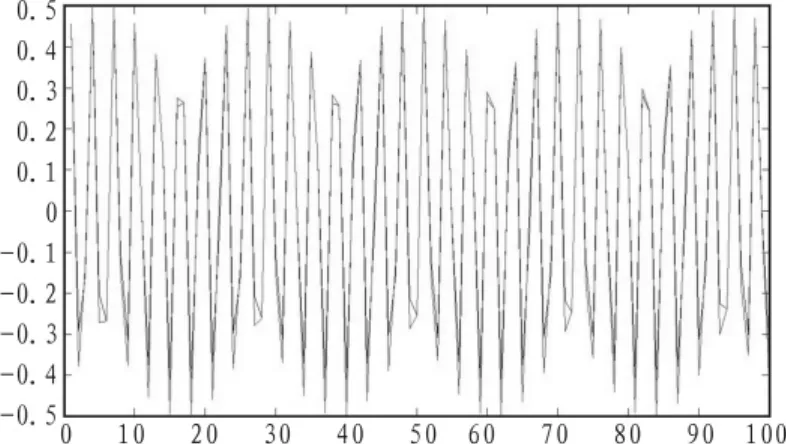
圖5 電液比例位置控制系統輸出曲線Fig.5 Electrohydraulic proportional position control system output curve
本次仿真對于每個目標值都是進行300次逼近得到的結果。從仿真圖中可以看出系統的誤差變化是周期性的,其原因在于輸入信號也是周期變化的。
5 結 論
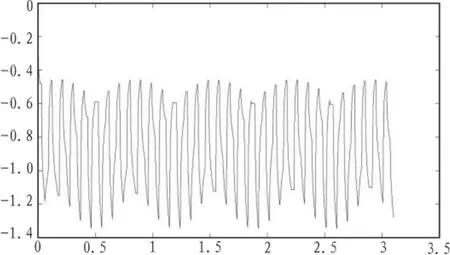
圖6 T-S模糊控制器輸出曲線Fig.6 T-S fuzzy controller output curve
本文針對電液比例位置控制系統的死區和非線性的問題,采用T-S模糊模型的方法建立了基于T-S模糊模型的電液比例位置控制系統,根據對電液比例位置控制系統的特點編制相應地模糊規則,并不斷的完善這些規則,使電液比例位置控制系統能夠越過死區。雖然通過仿真實驗驗證了系統的性能,并取得了較好的效果。但為了是系統的控制效果更加理想可以增加模糊規則的數目,但隨著模糊規則的數目的增加系統的變得更加復雜,從而降低了系統的響應速度。為此,怎樣用較少的模糊規則數目使系統的控制效果變好還有待于進一步的研究。
[1]鄭江,陳柏金.電液比例位置控制系統的參數自整定Fuzzy-PI控制[J].液壓與氣動,2003(5):33-35.
ZHANG Jiang,CHEN Bai-jin.Electrohydraulic proportional position control system with parameter self-tuning Fuzzy-PI control[J].Hydraulic and Pneumatic,2003(5):33-35.
[2]朱銀法,陳冰冰,安磊.電液比例位置控制系統的自整定模糊PID控制研究[J].機床與液壓,2010,38(8):98-100.
ZHU Yin-fa,CHEN Bing-bing,AN Lei.Electrohydraulic proportional position control system with self-tuning fuzzy PID control research[J].Hydraulic and Pneumatic,2010,38(8):98-100.
[3]趙瞻,郭淑娟.基于電液比例位置系統的模糊自整定PID控制器[J].機電工程,2006,23(11):59-62.
ZHAO Zhan,GUO Shu-juan.An electro-hydraulic proportional position control system based on fuzzy self-tuning PID controller[J].Mechanical and electrical engineering,2006,23(11):59-62.
[4]常鈺,馮永保.電液比例閥控缸速度控制系統的建模與仿真[J].液壓氣動與密封,2011(8):23-28.
CHANG Yu,FENG Yong-bao. The electro-hydraulic proportional speed control system modeling and simulation[J].Hydraulic and Pneumatic Seals,2011(8):23-28.
[5]孔德永,高永琪.T-S模糊控制在飛行器滾動通道設計中的應用研究[J].彈箭與制導學報,2009,29(4):19-24.
KONG De-yong,GAO Yong-qi.T-S fuzzy control in aircraft rolling channeldesign applied research[J].Journalof Projectiles and Guidance,2009,29(4):19-24.
[6]趙賢林,沈明霞.基于Delta算子系統T-S模型的魯棒穩定性研究[J].控制工程.2007,14(1):60-63.
ZHAO Xian-lin,SHEN Ming-xia.Based on theDelta operatorsystems robuststability ofT-S model[J].Control Engineering,2007,14(1):60-63.
[7]宋金澤,戴斌,崔慧海,等.基于T-S模糊模型的LQR控制器設計[J].計算機仿真,2009,26(11):174-177.
SONG Jin-zhe,DAI Bing,CUI Hai-hui,et al.Based on T-S fuzzy model of LQR controller design[J].Computer Simulation,2009,26(11):174-177.
[8]陳學有,趙志偉,尹柳.基于隨機負荷與模糊線性規劃的可伸縮靜態安全域[J].陜西電力,2012(6):43-48.
CHEN Xue-you,ZHAO Zhi-wei,YIN Liu.Flexible steadystate security region of power system with stochastic load demand and fuzzy linear programming[J].Shaanxi Electric Power,2012(6):43-48.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(2017年9期)2017-09-26 03:41:45