正弦波永磁同步電機(jī)靜態(tài)電流概述
2013-09-25 01:49:28黃明
電氣傳動(dòng)自動(dòng)化 2013年2期
黃 明
(煙臺(tái)寶鋼鋼管有限責(zé)任公司,山東煙臺(tái) 265503)
1 引言
正弦波永磁同步電機(jī)具有定子三相分布繞組和永磁轉(zhuǎn)子,工業(yè)應(yīng)用中一般稱之為交流伺服電機(jī),本文簡(jiǎn)稱伺服電機(jī)。所謂靜態(tài)電流就是指已經(jīng)加載使能的伺服電機(jī),在沒(méi)有啟動(dòng)命令情況下,流經(jīng)電機(jī)定子繞組的電流。
伺服電機(jī)靜態(tài)電流重要性不言而喻,然而教材中僅有對(duì)伺服電機(jī)定子和轉(zhuǎn)子電流模型的描述,沒(méi)有伺服電機(jī)靜態(tài)電流的詳細(xì)描述和計(jì)算方法,也就無(wú)法計(jì)算出靜態(tài)電流的正常范圍。
2 理論分析
如圖1所示為控制原理圖。伺服電機(jī)轉(zhuǎn)子上安裝有高精度編碼器,能精確檢測(cè)出磁極位置和轉(zhuǎn)子相對(duì)于定子的精確位置,用以控制伺服驅(qū)動(dòng)器電流的頻率和相位,從而使定子和轉(zhuǎn)子磁動(dòng)勢(shì)保持確定的相位關(guān)系,進(jìn)而產(chǎn)生恒定的轉(zhuǎn)矩圖[1]。
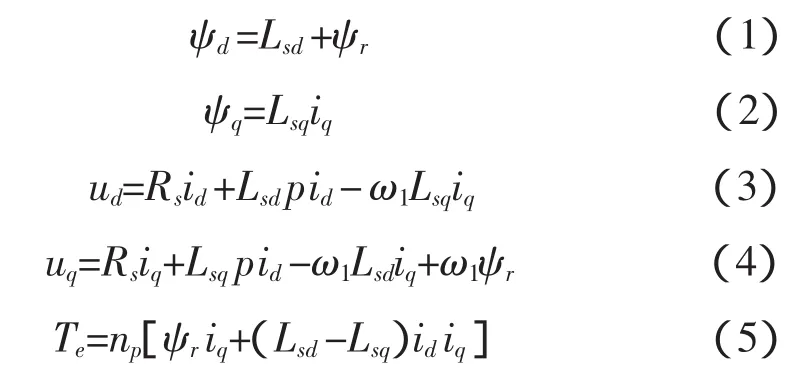
伺服電機(jī)在 dq 坐標(biāo)系中磁鏈方程為[1,4]:
為了達(dá)到負(fù)載扭矩僅與定子電流幅值大小相關(guān)的控制目的,需要精確檢測(cè)轉(zhuǎn)子d軸與定子繞組A軸之間的夾角,同時(shí)確保伺服驅(qū)動(dòng)器三相定子的合成電流矢量位于q軸上(領(lǐng)先于d軸90°),如圖2所示,且,并有
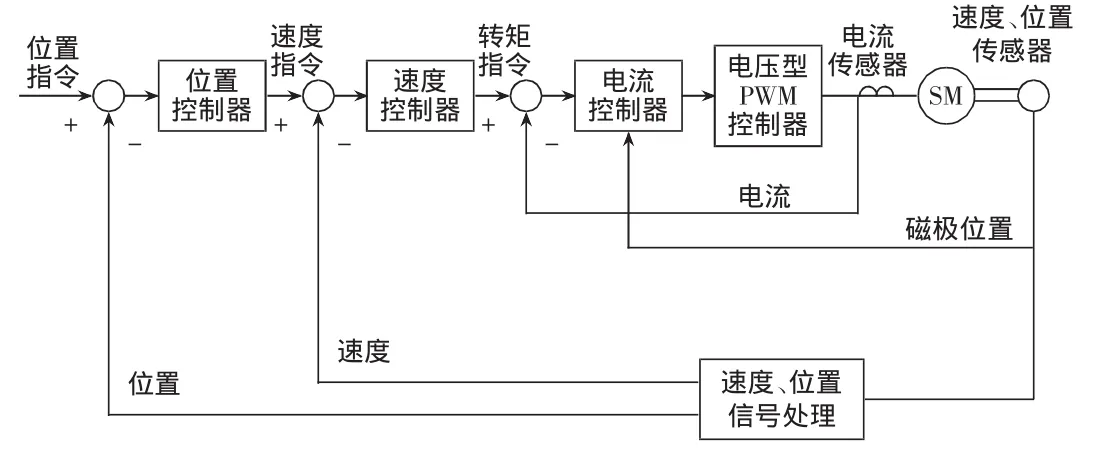
圖1 控制原理圖
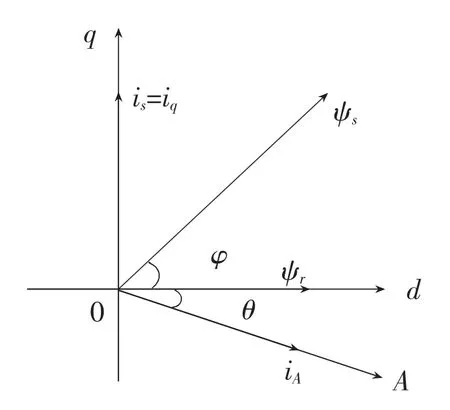
圖2 恒轉(zhuǎn)矩調(diào)速
令 id=0、is=iq,Lsd=0,聯(lián)立方程式(1)~(5),可得永磁同步電動(dòng)機(jī)在dq坐標(biāo)系轉(zhuǎn)矩方程為:
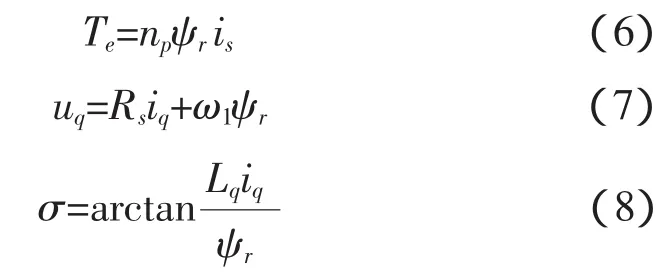
式中:ψr為永磁轉(zhuǎn)子磁通量,np為定子極對(duì)數(shù),is為dq坐標(biāo)系中定子電流,σ為電機(jī)功角。
根據(jù)“扭矩=轉(zhuǎn)矩×力臂”可知

實(shí)際工業(yè)生產(chǎn)中,對(duì)伺服電機(jī)電流影響最大的為轉(zhuǎn)子承受力,為了分析方便,這里忽略力臂影響,則由公式(9)可以得出:

通過(guò)查看伺服電機(jī)說(shuō)明書(shū),一般可以查到正常狀態(tài)下伺服電機(jī)相關(guān)參數(shù):靜態(tài)扭矩(M0)、靜態(tài)電流(I0)、最大扭矩(Mmax)、峰值電流(Ipeak),故由公式(10)可知伺服電機(jī)空載時(shí),靜態(tài)電流為:

則最大靜態(tài)電流占峰值電流的百分比為:
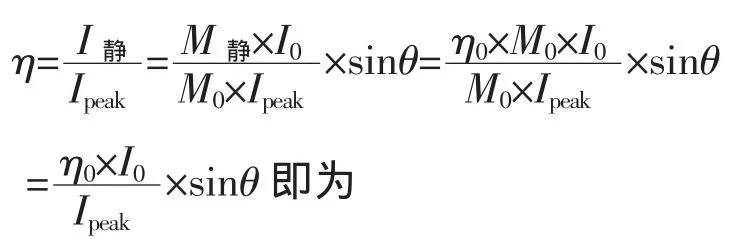

η0為靜止扭矩減小系數(shù)。
因此很容易得靜態(tài)電流百分比范圍為:

由式(6)可知,永磁同步電機(jī)轉(zhuǎn)子磁通量恒定,隨著負(fù)載的增加,電流is直線上升,導(dǎo)致電機(jī)總磁通量上升,嚴(yán)重時(shí),電機(jī)實(shí)際實(shí)時(shí)扭矩或?qū)崟r(shí)電流超過(guò)M0和 I0,造成 ψs≥ψr,這時(shí)由可以推斷出φ大于90°,這樣永磁同步電機(jī)進(jìn)入弱磁狀態(tài),同時(shí)-ψr方向還產(chǎn)生一個(gè)電流,該電流將造成永磁磁通量的下降,嚴(yán)重時(shí)甚至造成永磁體永磁去磁。進(jìn)入弱磁狀態(tài)的伺服電機(jī)很快將進(jìn)入停止?fàn)顟B(tài),并引發(fā)伺服驅(qū)動(dòng)報(bào)警,報(bào)警代碼一般為300608故障。
3 案例計(jì)算
某車床Z軸采用 840D、611D與 1FK7080-5AF71-1AA0電機(jī)驅(qū)動(dòng),其伺服系統(tǒng)參數(shù)如下:
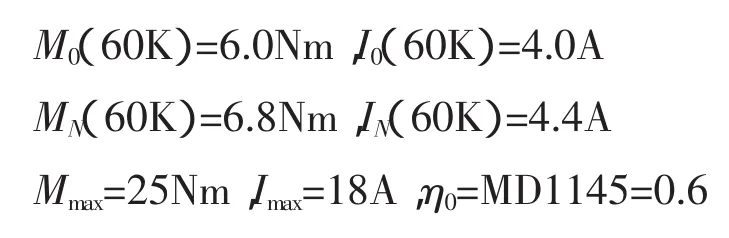
根據(jù)公式(12)可推算出:

由于該電機(jī)轉(zhuǎn)子識(shí)別時(shí)驅(qū)動(dòng)參數(shù)MD1020(電機(jī)識(shí)別轉(zhuǎn)子旋轉(zhuǎn)角度)10°,也即

聯(lián)立公式(14)和(15),可知 0.023≤η≤0.13。
通過(guò)現(xiàn)場(chǎng)查閱機(jī)床軸MD1708參數(shù),MD1708為0.038,該值與理論值相差不大,基本上可以證明該軸處于正常工作狀態(tài)。如果時(shí)間監(jiān)控該值,發(fā)現(xiàn)其超出理論值過(guò)多,則證明該軸存在故障隱患,應(yīng)及時(shí)安排相關(guān)檢修。
4 結(jié)束語(yǔ)
通過(guò)正弦波交流永磁同步電機(jī)理論分析和理論計(jì)算,并結(jié)合生產(chǎn)維修實(shí)踐經(jīng)驗(yàn),提出一種伺服電機(jī)靜態(tài)電流計(jì)算方法。基于這種算法,可以很好地分析數(shù)控機(jī)床故障現(xiàn)象,并及時(shí)發(fā)現(xiàn)機(jī)床進(jìn)給軸過(guò)載隱患,為機(jī)床狀態(tài)維護(hù)提供理論依據(jù)。
[1]陳伯時(shí).電力拖動(dòng)自動(dòng)控制系統(tǒng)(運(yùn)動(dòng)控制系統(tǒng))第三版[M].北京:機(jī)械工業(yè)出版社,2006.
[2]劉希金.機(jī)床數(shù)控系統(tǒng)故障檢測(cè)及維修[M].北京:兵器工業(yè)出版社,1995.
[3]張光耀.數(shù)控設(shè)備故障診斷與維修實(shí)用教程[M].北京:電子工業(yè)出版社,2005.
[4]寇寶泉,程樹(shù)康.交流伺服電機(jī)及其控制[M].北京:機(jī)械工業(yè)出版社,2010.
[5]王 鋼.數(shù)控機(jī)床調(diào)試、使用與維護(hù)[M].北京:化學(xué)工業(yè)出版社,2006.
[6]王洪波.數(shù)控機(jī)床電氣維修技術(shù)——SINUMERIK 810D/840D[M].北京:電氣工業(yè)出版社,2007.
