電調濾波器自動校頻技術
2013-09-19 10:18:16衷潔,韓軍
無線電工程 2013年1期
衷 潔,韓 軍
(中國電子科技集團公司第五十四研究所,河北石家莊050081)
0 引言
軍事通信裝備,如微波通信設備、散射通信設備和數字化電臺等大量采用電調濾波器以實現ECCM功能。早期電調濾波器工作于UHF頻段,采用λ/4諧振濾波器,調諧桿的行程比較長,經過長期運行產生的腔體、傳動、回零、調諧桿以及溫度等的變化導致調諧頻率變化的幅度比較小,在設計時留有一定的帶寬余量即可滿足長期使用要求。而隨著頻段不斷提高,如C、X、Ku波段,最大問題就是隨著波長的縮短,電調諧器件的行程變得非常短,也就是調諧靈敏度非常高。長期工作老化和溫度變化導致的等效行程變化嚴重影響濾波器的穩定性。每次記錄的脈沖—頻率對應表格隨著外界應力變化而不同,給電調濾波器在高頻段應用帶來了困難。針對該技術難點,提出了一套電調濾波器自動校頻程序,在通信設備中運行該專用程序,即可實現電調濾波器的頻率校準,由于每次運行該程序實現的是實時校準,外界應力已經全部考慮進來,從而徹底解決電調濾波器的頻率偏移問題。
1 電調濾波器原理
1.1 電調濾波器組成
以微波腔體電調濾波器為例,電調濾波器由腔體濾波器、步進電機、驅動電路和傳動裝置等部分組成,組成原理框圖如圖1所示。
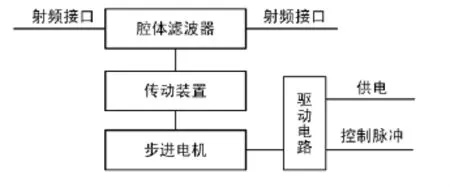
圖1 電調濾波器組成原理
1.2 電調濾波器調諧原理
文獻[1,2]指出:根據工作頻段、功率容量以及電調濾波器的實現難易程度,腔體選擇λ/4同軸腔結構,工作頻率隨著內導體長度的增加,頻率由高到低逐漸變化。
以某濾波器設計為例:外腔橫截面為邊長為30 mm的正方形,當同軸腔的外、內導體直徑比為3.591時,同軸腔的Qe值最高,即同軸腔導體損耗最小。內導體頂端與腔體壁之間距離10 mm以上,產生的端電容很微弱,對頻率不會有影響,因此腔體的高度選擇為65 mm。在HFSS中建立單諧振腔模型,用本征模求解仿真,根據仿真結果可以看到,調諧范圍大致在41 ~53 mm,可覆蓋1 300 ~1 600 MHz,調諧行程約有12 mm,每25 MHz調程是0.1 mm,按照目前的加工情況,能夠較好地滿足調諧精度。
從測試結果可知,內導體的長度與頻率成單調一一對應關系,通過改變內導體的長度就可以改變濾波器工作頻率。
1.3 電調濾波器調諧方式
由于通過改變內導體長度即可改變工作頻率,將頻率變化轉化為內導體長度變化。為了精確實現內導體長度變化,采用步進電機與傳動裝置結合的方式。
如圖1所示[3,4],步進電機用于把電脈沖信號轉換為線位移或者角位移。如果電機沒有超載時,當一個電脈沖信號發送至步進電機的驅動器時,按照預先設定的方向,驅動器就可以驅動步進電機按照設置的方向進行轉動,以此類推,步進電機就可以按照固定的角度進行運行。脈沖信號的脈沖數、頻率決定了步進電機的行程和轉動速度。
1.4 步進電機實現頻率改變
步進電機控制由監控及其驅動電路組成。對于傳統的電調濾波器,當需要頻率改變時,通過監控鍵盤輸入需要改變的頻率值,監控讀取該頻率值,并通過查表轉換成相應的驅動方向和脈沖數量,發送該脈沖到驅動電路,驅動電路即驅動步進電機達到相應的行程,該行程轉換為腔體濾波器調諧內導體的長度改變,從而實現工作頻率的改變。當然,為了克服步進電機驅動方向不同帶來的回零現象,在實際應用中要加回零程序和防止失控程序。
以上為傳統電調濾波器的調諧原理,由于基于外界應力條件對于濾波器工作頻率影響可以忽略或忍受的前提,因此一般在調諧內導體行程比較長的低頻段應用比較合適。
當頻率升到C波段、X波段以上時,由于無法忽略外界調諧內導體對頻率的影響,傳統的脈沖數與頻率的對應表格不再是一個恒量,而是疊加了外界應力因素,導致傳統的電調濾波器控制出現技術難題,無法正常使用。
2 電調濾波器自動校頻
為了能夠在更高頻率上正常使用電調濾波器,下面提出了一套自動校頻方法,該方法不再依賴脈沖數與頻率的對應表格,而是通過現場測試電調濾波器的通帶特性,將實時測試的通帶特性與實時脈沖數一一對應,通過分析脈沖數在通帶內的分布情況,實時驅動步進電機到達濾波器的通帶范圍,實現電調濾波器的自動校頻。
設備在自動對準狀態,發送單載波信號f1給被測濾波器,該單載波信號頻率f1即為該濾波器工作頻率,給電調濾波器連續發送步進脈沖,并實時檢測通過濾波器后的單載波電平數值,當濾波器到達某個位置達到設置電平門限時,如圖2所示,該時刻t0作為脈沖數記錄的零點,開始記錄脈沖數;繼續發送脈沖,直至該電調濾波器第二次達到電平門限,如圖3所示,記錄該時刻t1脈沖數為N,發脈沖停止。
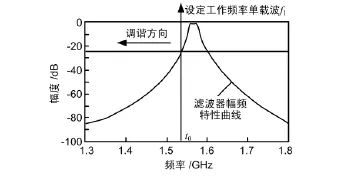
圖2 電調濾波器t0時刻
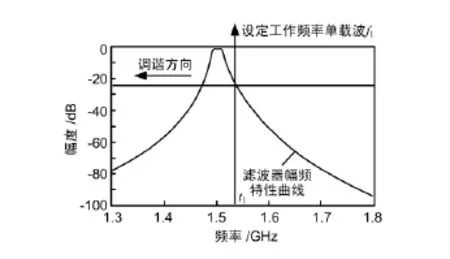
圖3 電調濾波器t1時刻
此時需要反向發脈沖,脈沖數為:N/2,在不考慮回零效應時,濾波器對準到f1預設頻率,如圖4所示,實現電調濾波器自動校頻。
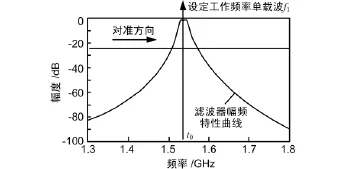
圖4 電調濾波器自動校頻操作
由于f1頻率與濾波器狀態頻率位置不確定,存在濾波器左邊進入、右邊進入和單邊進入等情況,通過編程可分別識別并自動調整。
下面分別結合TDD和FDD不同雙工模式的設備進行詳細分析。
2.1 在TDD設備中的自動校頻技術
TDD設備采用時分雙工方式,射頻前端采用電調濾波器,當需要進行自動校頻時,設備監控執行自動校頻程序流程如圖5所示[5]。
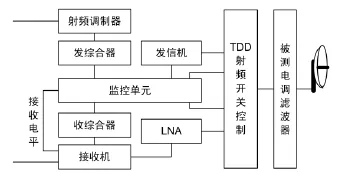
圖5 TDD設備組成
預置發頻率到指定頻率,判斷頻率是否改變,若改變,則將發信機改為該頻率單載波波形,功率放大器置于最小輸出電平,設備設為射頻自環狀態,天線口接匹配負載,實時檢測接收電平,確定預設電平門限L(典型值)。
如果是首次開機,則驅動步進電機向歸零方向調諧,在此過程中,如果出現超過預設電平門限L值,則從該時刻開始計數脈沖數,直至再次出現電平門限L,停止計數。將計數N除以2,反方向驅動電機N/2脈沖,濾波器調諧完成;如果只出現一次電平門限L值,則從歸零點反方向連續發送脈沖信號,出現2次L電平,按照以上算法對準。
如果監控記憶有上次頻率值,則計算頻率差Δ(新頻率-舊頻率),當Δ為負,則向歸零方向驅動電機;當Δ為正,則向相反方向驅動電機,在此過程中,如果出現超過預設電平門限L值,則從該時刻開始計數脈沖數,直至再次出現電平門限,停止計數。將計數N除以2,反方向驅動電機走N/2脈沖,濾波器改頻完成。
而后,監控按照逆向操作,回復改頻前各個單元的狀態,自動校頻完成。
2.2 在FDD設備中的自動校頻技術
如圖6所示[6],FDD設備采用時分雙工方式,有收發電調濾波器構成雙工器,需要分別進行收發電調濾波器的自動校頻才能夠完成設備頻率改變。
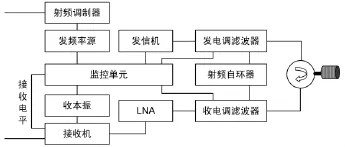
圖6 FDD設備組成
與TDD設備相比,發電調濾波器自動對準時的流程基本相似;而收濾波器則需要借助發信機信號作為源,對收濾波器進行自動頻率對準,由于收發頻率不同,需要采用FDD射頻自環的移頻模塊來實現設備監控執行自動校頻程序,其他原理則相同。
3 可行性技術分析
如圖2所示,實際電調濾波器幅頻特性響應在單邊為單調曲線,這樣才能夠確保預置電平門限的單邊唯一性,而對于切比雪夫相應或最大平坦響應濾波器中,在3~6 dB帶寬內,均可以滿足要求。實際電平檢測均采用探針耦合方式,因此要求收發電調濾波器探針耦合分量與濾波器幅頻特性保持一致。自環器到接收機的信號與外界信號相比,應該是一個高信噪比的電平信號,否則會受到外界干擾而使頻率對準不準或失敗。濾波器驅動時,按照程序達到一個自動校頻過程,無論頻率改變的Δ正與負,總有一次正驅動和一次反驅動,可以認為螺桿機械應力誤差基本相同,不需進行單方向調整。在FDD設備實際應用中,調整收發濾波器驅動時,總有某時刻收發濾波器同頻的狀態,程序上需要避免損毀LNA等前端器件。
4 結束語
電調濾波器自動校頻是解決電調濾波器頻率漂移的最根本方法。上述方法在不增加硬件的基礎上,通過設備監控軟件設計即可實現電調濾波器自動校頻功能,從根本上克服了外界應力導致頻率漂移的問題,簡化了電調濾波器繁瑣的調試工作,尤其在C、X等高頻段電調濾波器應用中,將會起到非常重要的作用。
[1]賈建蕊,韓 軍.基于HFSS設計同軸腔調諧濾波器[J].無線電工程,2011,41(1):44 - 46.
[2]甘本祓,吳萬春.現代微波濾波器的結構與設計(上).北京:科學出版社,1973.
[3]張同祥,曲 波.步進電機控制器的設計[J].電工電氣,2010(11):14-17.
[4]王雁平.步進電機定位控制系統的設計[J].現代電子技術,2010(18):205 -207.
[5]陳如明.大容量數字微波傳輸系統工程[M].北京:人民郵電出版社,1998.
[6]GOLDSMITHA.Wireless Communications[M].北京:人民郵電出版社,2007.