擴散爐自動上下料系統安全性設計
2013-09-17 01:49:22林伯奇羅于亮毛朝斌陳特超
電子工業專用設備 2013年7期
林伯奇,羅于亮,毛朝斌,陳特超
(中國電子科技集團公司第四十八研究所,長沙, 410111)
擴散爐自動上下料系統安全性設計
林伯奇,羅于亮,毛朝斌,陳特超
(中國電子科技集團公司第四十八研究所,長沙, 410111)
介紹了一種用于臥式擴散爐的自動上下料系統,對自動上下料系統組成進行了介紹,著重討論了系統的安全性問題,并對安全性提出了解決方案,該系統控制效果良好,能為電池片生產企業降低人工成本,提高生產效率,增強了設備的安全性,適合大規模電池片生產要求。
自動上下料系統;擴散爐;系統安全性
隨著晶體硅電池產業的快速發展,電池片生產廠家為了降低人工成本,提高生產效率,增強設備的安全性,對電池生產設備的要求也不斷提高。臥式擴散設備作為生產光伏電池的主要設備,其性能和生產效率尤其受到廣大光伏電池生產廠家的關注,現在電池生產廠家要求提高擴散設備的自動化程度,提高人取放舟的安全性,同時要保證舟在放取的時候SiC槳和舟的安全性[1][2]。
因此,設計自動上下料系統時必須考慮系統運行的安全性。中國電子科技集團公司第四十八研究所為適應客戶的新要求研制了一套用于擴散爐的自動上下料系統。這套系統能很好地提高擴散爐的自動化程度,同時也保證了設備和人的安全。
1 系統安全性分析
下面結合國內外現有的自動上下料系統進行安全性分析。圖1為自動上下料系統,從圖中可以看出,本系統是實現石英舟在槳上的自動裝卸,因此,包括沿X軸方向運動的SiC槳在內,裝卸系統是一個X、Y、Z三維立體運動系統。由于SiC槳、石英舟及硅片價格昂貴,因此系統的安全顯得尤為重要。
首先是Z軸方向,臥式擴散爐一般是幾根反應管豎直分層疊放,根據反應管的位置不同,裝卸舟所要達到的高度也不同,機械手臂通過Z軸方向運動將舟在不同爐管與不同位置的緩存區間傳遞。因此,對應不同的高度需要有精確的位置檢測,既要防止機械手臂過了所要求的位置卻沒有停止的情況,也要防止機械手臂沒達到所要求的位置就停下來的情況。通過在所需的高度安裝檢測裝置,結合電機的反饋信息能很好地實現Z軸方向的運動。
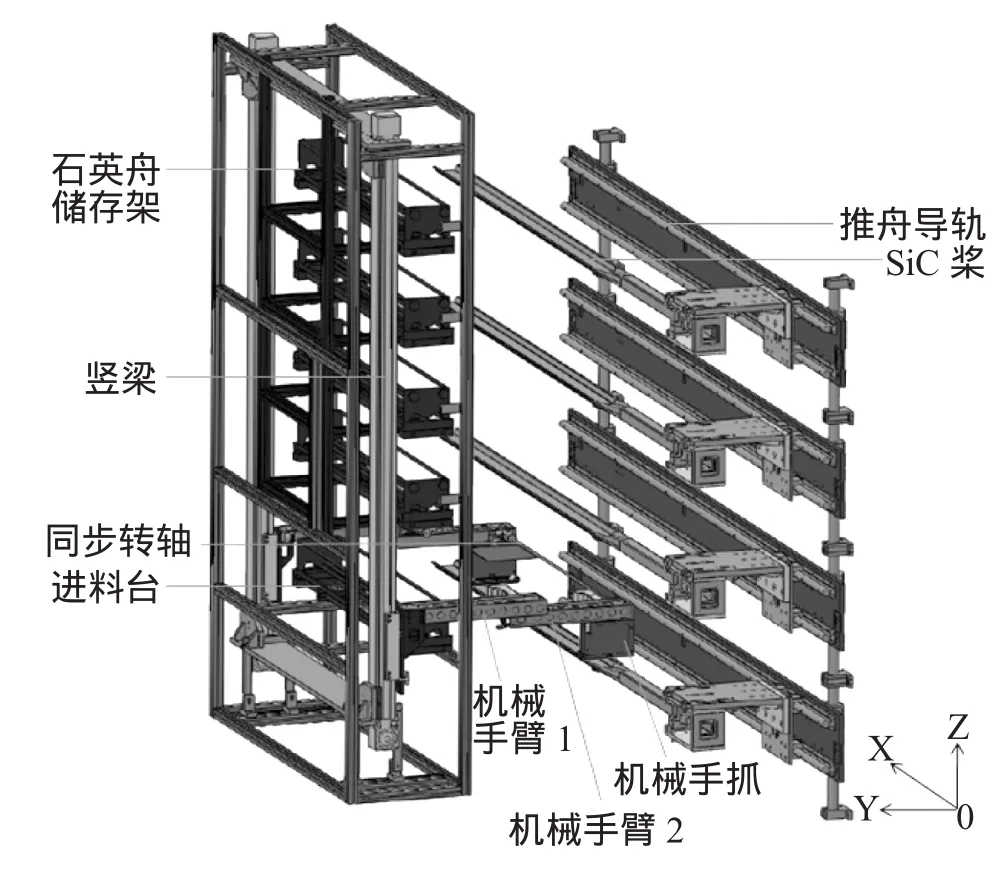
圖1 自動上下料系統
在Y軸方向,機械手爪沿著Y軸方向運動,根據實踐經驗,幾根反應管豎直分層疊放時不可能在同一豎直平面,因此相對應的SiC槳也不在同一豎直平面,有微小的差異。因此機械手爪對應每層Y軸方向運動的距離也是有差異的,這種微小的差異通過在機械手臂上安裝位置檢測裝置是無法實現的。一般地,通過在在電機上安裝旋轉編碼器,根據編碼器反饋的信息來確定位置。這種方式只有在電機與傳動機構連接完好的情況下能很好的實現。然而如果電機與傳動機構連接出現異常,編碼器卻不能反應傳動機構的實際運行情況,給系統帶來了安全隱患。
在X軸方向,當機械手臂將舟放到SiC槳上時,SiC槳將舟送入反應管內,當工藝完成時,SiC槳將舟取出回到機械手臂取舟位置,再由機械手臂將舟取走。一般地,取放舟只是一個重復動作,對舟的位置不會造成影響,只需檢測SiC槳的位置。實際上,軟著陸擴散爐中工藝時舟與槳是分離的,也就是說SiC槳將舟送入反應管后,SiC槳是脫離舟退出反應管再進行工藝的。如果SiC槳沒有調好或者其他因素可能導致槳與舟的相對位置發生變化,那么槳載舟出來后,舟就不能回到機械手臂放舟位置,機械手臂無法安全地取到舟。
3 M5111-5WK/UM自動上下料系統
3.1 自動上下料組成
本文研制的自動上下料系統為龍門結構,如圖1所示。包括:沿豎直軸(Z軸)方向的龍門升降機;在水平面內沿Y軸方向運動的機械手臂;提舟用的機械手爪;石英舟儲存架;進料臺;控制系統。
龍門升降機結構由兩根豎直安裝的梁作為滑臺,梁上有帶剎車裝置的驅動電機。龍門升降機用來執行垂直方向的運動,負責石英舟在進料臺,擴散爐各管之間和石英舟儲存架的垂直運動。
在水平方向設計兩個機械手臂及取舟機械手爪,機械手臂分別固定在豎梁的兩個滑臺上,可沿Y軸方向前后運動;兩個機械手爪采用同一個電機驅動,中間通過同步軸連接保證左右機械手爪動作一致。機械手爪成“L”型且相對設置在機械手臂的下部。機械手爪用于對進料臺,儲存架和SiC槳上的石英舟的抓取,并且能夠在水平方向移動,配合龍門升降機完成石英舟的裝卸。
豎梁的內側還分別對稱設有先向內再向前延伸而成的石英舟暫存區,石英舟暫存區的內側設有兩個放舟支架。用來對加工完畢的熱石英舟進行冷卻或在加工忙和出現故障時,對正在運輸中的石英舟進行儲存。
自動上下料系統通過獨立的PLC控制,通過控制龍門升降機在滑臺上下運動及機械手臂在Y軸方向運動,實現對石英舟的自動裝卸。
3.2 控制系統安全性設計
圖2為自動上下料控制系統框圖,其中可編程控制器采用三菱FX3U80MT+FX2N16EX,控制控制龍門升降機在滑臺上下運動及機械手臂在Y軸方向運動及系統的位置檢測。而SiC槳上的對舟檢測由擴散爐各管的控制系統檢測,通過上位機將檢測信息傳送給自動上下料控制系統。下面著重討論系統的安全性設計。
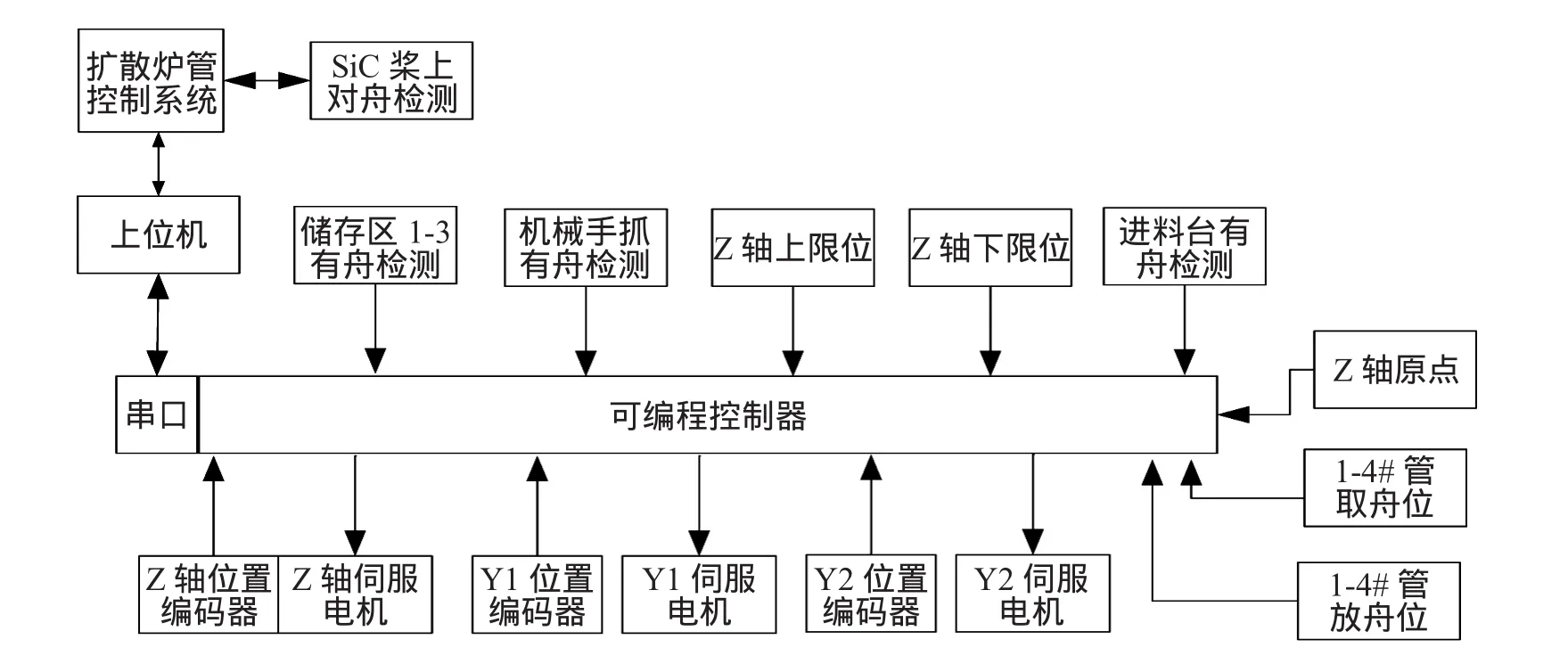
圖2 控制系統框圖
首先在Z軸方向的位置檢測,在所需的高度將到位開關裝置安裝在豎梁上,如1#管的取舟位和放舟位。電機使用帶有編碼器的伺服電機。驅動電機配有剎車裝置,能夠保證在非工作狀態下,滑塊機構自鎖,保證在掉電狀態下石英舟的安全。其工作原理如圖3所示,當升降機在長距離檢測開關1運動到2時,在兩開關之間升降機將高速運動,為防止在檢測開關2過沖,在離檢測開關2一段距離時升降機就須減速運行。升降機從檢測開關1運行到檢測開關2的過程為:升降機在檢測開關1開始以3 000 mm/min運行,電機編碼器同時計數,計數到距離檢測開關2還有200 mm時,速度變為300 mm/min,當開關2檢測到升降機,電機停止運行,如果在運行時間容差10 s內檢測開關2沒有檢測到信號,系統發出報警信號進行人工干預。當升降機豎梁的兩端裝有限位檢測開關,一方面作為調試過程中升降找原點的參考點,另一方面作為保證在生產過程中龍門升降機的安全。
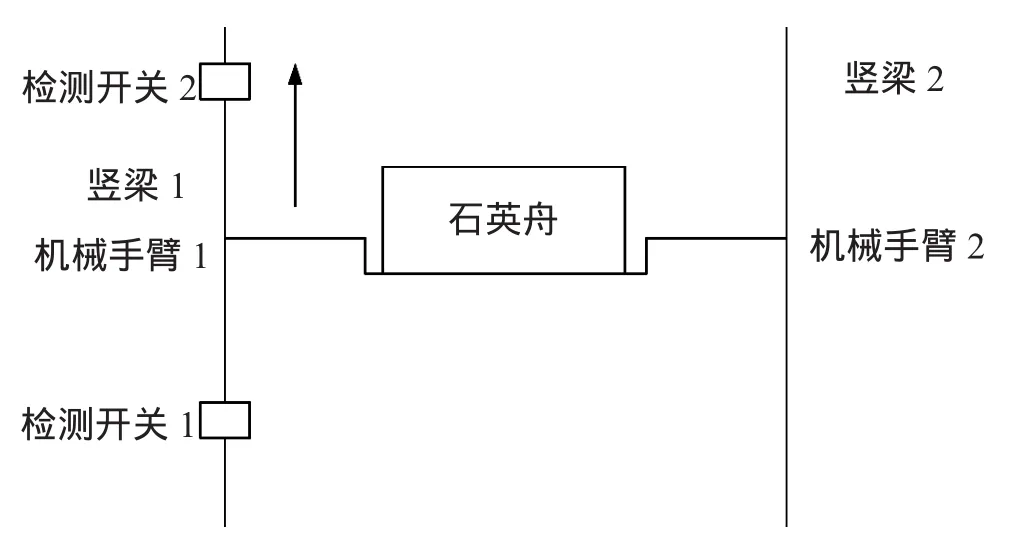
圖3 升降機在Z軸方向運動原理圖
在Y軸方向,機械手爪的位置檢測靠獨立編碼器完成。在兩個機械手爪之間的如圖1所示同步轉軸的從動一端安裝編碼器,實時反饋機械手爪的運行情況,如果運行時間在容差范圍5 s內編碼器沒有檢測滿足所要求的計數量,認為系統出現故障,系統發出報警信號進行人工干預。在機械手臂與豎梁連接端安裝一個檢測開關作為機械手爪原點。

圖4 SiC槳上對舟開關原理圖
在X軸方向,SiC槳上對舟檢測如圖4所示,在擴散爐推舟底板上安裝兩個對射開關,檢測到石英舟出爐后是否在兩個對射開關之間,確定機械手爪是否安全取舟。其工作原理是當槳和石英舟從反應管退出時,對射開關2檢測到石英舟,槳和舟繼續退出直到對射開關1檢測到石英舟,出舟運動立即停止,此時舟還在對射開關2的檢測范偉內即舟在取舟安全范圍內。如果舟停止后不是兩個對射開關同時有檢測信號,則認為系統故障,系統將發出報警信號進行人工干預。兩個對射開關之間的距離與石英舟的長度容差范圍小于5 mm,假設石英舟的長度為1 205 mm,那么對射開關的距離要大于1 200 mm,且小于1 205 mm,保證兩對射開關都同時檢測到舟。由于一般的光電開關發出的光有一定散射,很難保證石英舟的安全區域,在此選用歐姆龍的E3Z-Laser激光傳感器。
機械手爪上有舟檢測,通過在兩個手爪上分別安裝小型安全限位開關,只有當系統檢測到兩個開關同時作用時才確定機械手爪上的舟是安全的,如果只有一個機械手爪檢測到有舟而5s后還沒檢測到另一機械手爪有舟,則認為系統出現異常,系統發出報警信號進行人工干預。限位開關采用柱塞式,只有當一定的重物壓在機械手爪上時,開關才會作用,這樣判斷石英舟是否安全放在手爪上。
儲存區和進料臺的有舟檢測同機械手爪上有舟檢測原理相同。
4 結 論
M5111-5WK/UM型擴散爐自動上下料系統目前運行了將近兩年,系統運行平穩。系統提高了擴散工序的自動化操作程度,減輕了對人工操作的依賴,避免了人工取放石英舟操作的隨意性對擴散工藝的影響,而且可以排除因剛出爐的石英舟在高溫時或在高處取放石英舟對操作人員帶來的安全隱患。本文從系統的安全角度分析了自動上下料系統可能帶來的安全問題,并提出了解決方案,保證了系統的安全可靠。
:
[1]向小龍,禹慶榮,文庚云,等.光伏行業擴散爐的技術現狀及發展趨勢[J].太陽能,2007(11):32-33.
[2]劉良玉,彭志堅.軟著陸潔凈閉管擴散爐研制[J].電子工業專用設備,2010,181:39-42.
The Automatic Loading and Unloading Diffusion Furnace System Safety Design
LIN Boqi,LUO Liang,MAO Zhaobin,CHEN Techao
(The 48th Research Institute of CETC,Changsha 410111,China)
Abstract:A kind of automatic loading and unloading system for horizontal diffusion furnace is mentioned in this dissertation,in which the security about this system is discussed and the resolution is produced especially.This system has good control effect,reduce labor costs ,increase productivity,and enhance the security of the device,which is suitable for large-scale solar cell production requirements.
Keywords:Automatic loading and unloading system;Diffusion furnace;System security
TN305
B
1004-4507(2013)07-0037-04
2013-06-16
林伯奇:(1969-),男,湖南武岡人,高級工程師。研究方向:半導體、光伏裝備制造。
猜你喜歡
現代儀器與醫療(2022年2期)2022-08-11 09:51:40
計算機應用(2022年2期)2022-03-01 12:33:42
汽車工程師(2021年12期)2022-01-18 06:02:43
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
信息安全與通信保密(2016年3期)2016-08-23 01:23:46
海峽科技與產業(2016年3期)2016-05-17 04:32:12