采用電磁分支電路阻尼吸振器的游艇減揺技術
2013-09-10 04:58:44李培超謝石林嚴博陳超核張希農
振動與沖擊 2013年10期
關鍵詞:優(yōu)化
李培超,謝石林,嚴博,陳超核,張希農
(1.西安交通大學航天航空學院,機械結構強度與振動國家重點實驗室,西安 710049;2.華南理工大學廣東省船舶與海洋工程技術研究開發(fā)中心,廣州 510641)
輕型游艇在海上高速航行時,受到海浪、海風以及海流等海洋環(huán)境擾動的作用,不可避免地要產生搖晃運動,這將嚴重影響船體的穩(wěn)定性與安全性,同時也顯著降低了駕駛及乘坐的舒適感。因此,對游艇進行減搖控制是一個迫切需要研究解決的問題。傳統(tǒng)的減搖技術,如減搖水艙、減搖鰭[1]等,由于占用船體空間尺寸大,生產成本高,難以適應復雜海況,適應性有限。雖然綜合減搖技術[2]可以得到較好的控制效果,但是結構和設計的復雜性大大增加,不利于整體減搖裝置可靠性的提高。
動力吸振器是一項發(fā)展成熟的結構減振技術,它的優(yōu)點是結構尺寸小,工作原理簡單,可靠性高,在許多工程領域均得到了廣泛應用[3]。在船舶工程領域,動力吸振器多是用于降低船體結構的振動[4],然而,將動力吸振器應用于船體的減搖穩(wěn)定控制研究迄今國內外尚不多見。
電磁分支電路阻尼吸振器[5-8](Electromagnetic Shunt Damping Absorber,EMSDA)是一種新近發(fā)展的減振技術,與傳統(tǒng)的電磁阻尼吸振器[9-10]不同,它是由一對正對的電磁體-永磁體和一個與電磁線圈并聯(lián)的分支電路構成的閉合回路組成,合理地設計分支電路,可以顯著地增加電磁阻尼,從而實現結構的振動控制。本文采用電磁分支電路阻尼吸振器,建立了游艇與電磁分支電路阻尼吸振器的耦合動力學模型。動力吸振器的參數優(yōu)化是提高控制效果的一個重要途徑,歷來受到廣泛研究[11-13],本文在所建模型的基礎上,進一步對電磁分支電路阻尼吸振器進行了參數優(yōu)化設計。考慮游艇所受激勵為隨機載荷,因此將船體運動的位移方差作為吸振器優(yōu)化設計的目標函數,并采用微粒群優(yōu) 化算 法[14-17](Particle Swarm Optimization algorithm,PSO)來求解對應的優(yōu)化問題,最后基于得到的優(yōu)化參數,對采用EMSDA的游艇減搖控制進行了數值仿真研究。
1 電磁分支電路阻尼吸振器
1.1 EMSDA的工作原理
圖1(a)和(b)為EMSDA的基本結構,它由彈性框體、吸振器質量、永磁體和電磁體以及分支電路四部分組成,其中Re、Le為電磁線圈的電阻與電感,R、L為分支電路的電阻與電感。永磁體部分由兩塊圓柱形磁鐵同極正對緊壓在一起組成,電磁線圈套筒則附著在彈性框體上部。當被控結構振動時,吸振器彈性框體會隨之發(fā)生變形導致框體上下相對錯動,從而在電磁線圈中產生感應電流。感應電流被接入到圖1(b)所示的分支電路控制回路中,通過調節(jié)分支電路參數,可以顯著地增加系統(tǒng)產生的電磁阻尼,達到振動控制的目的。
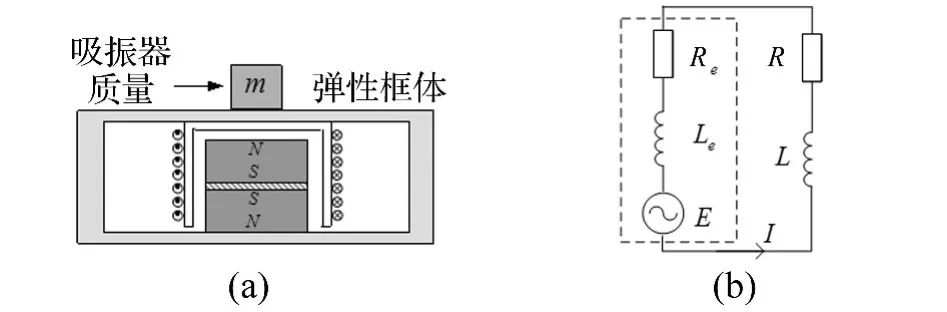
圖1 電磁分支電路阻尼吸振器結構Fig.1 Configuration of EMSDA
1.2 EMSDA的電磁阻尼力
吸振器系統(tǒng)的阻尼包括彈性框體結構的阻尼和可調節(jié)的電磁阻尼。彈性框體的阻尼和框體結構的形狀、材料特性等有關。下面建立吸振器的電磁阻尼模型。
考慮圖2所示的單個圓柱形永磁體,半徑和高分別為r0、a,不導磁墊片厚度為e。假設永磁體沿z軸正向均勻磁化,由Biot-Savart定律,可以得到圓柱形永磁體外任一點p處的總磁感應強度為[5]:

根據安培定律,電磁體上的電流元在磁場中的受力可以表示為:

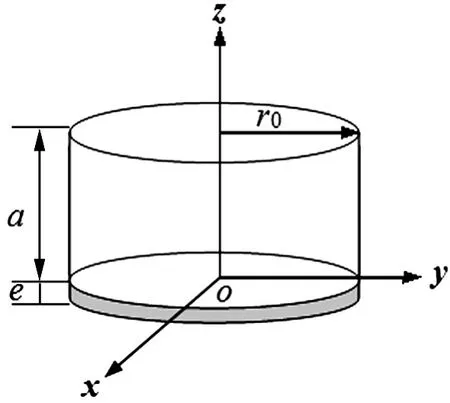
圖2 單個永磁體結構Fig.2 Configuration of single permanent magnet
由EMSDA的原理可知這里僅需考慮沿結構運動方向(即z方向)的電磁力,即只需計算在x、y方向磁感應強度作用下的電磁力,則有[6]:
上式中d為電磁線圈套筒與永磁體間的間隙,n1和n2分別為電磁線圈每層的匝數和層數,Cm為線圈電流與所受電磁力間的機電轉換系數。另一方面,電磁線圈在磁場中運動所產生的感應電動勢為:
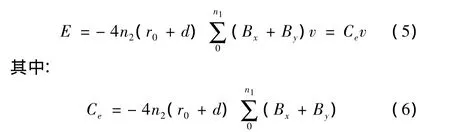
其中v為相對運動速度。由式(4)和(6)顯見Ce=-Cm,兩者均由電磁分支電路阻尼吸振器的結構決定,而與分支電路參數無關。
當電磁線圈接入圖1(b)所示的分支電路時,有:

其中:Z(s)=Ls+R為外置分支電路引入的阻抗,s為拉氏變量。此時整個電路中的等效電阻值為Rt=R+Re,等效電感值為Lt=Le+L,電流為:

由式(3)~(8),電磁體所受電磁力可表示為:
由式(9)和(10)可見,系統(tǒng)的電磁阻尼力可以簡化為一個粘性阻尼力,阻尼系數為Cs。在分支電路中引入負電感,并令L=-Le時,電路將呈現純阻特性,此時有:

由上式可知,電磁分支電路阻尼吸振器的電磁阻尼系數由機電耦合系數Cm和分支電路阻值R所決定。若采用有源元件在分支電路中引入負電阻,則可顯著增加吸振器的電磁阻尼系數Cs,從而提高控制效果。
2 采用電磁分支電路阻尼吸振器的游艇減搖控制模型
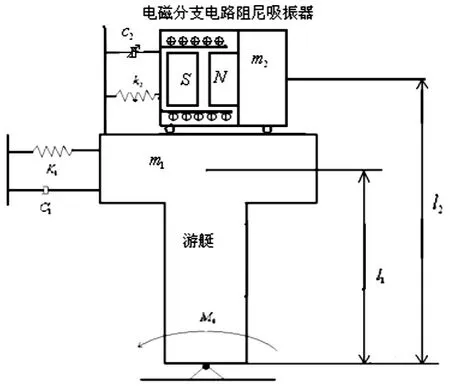
圖3 游艇-吸振器耦合模型Fig.3 Yacht-vibration absorber coupled model
式中:φ為游艇的搖擺角位移,x2為吸振器質量體的位移,m2、c2、k2分別為吸振器的質量、總阻尼和剛度,I、2Nμ、D、h分別為游艇的轉動慣量、橫搖阻尼系數、排水量和初穩(wěn)心高,l1和l2分別為游艇和吸振器的重心高度。令:

圖3為采用電磁分支電路阻尼吸振器的游艇減搖控制模型,這里只考慮單自由度的減搖控制。在該模型中,游艇在海中航行受到的海浪作用力等效成模型中的外力矩M,假設電磁分支電路阻尼吸振器與游艇剛性連接,則游艇橫搖時的系統(tǒng)耦合動力學方程為:
考慮到l1≈l2,式(13)可以重寫為:

式中:k1和c1分別為游艇與海水間作用所形成的剛度和阻尼系數,等效作用力F=M/l1。對方程(12)、(14)進行拉氏變換,可得到游艇位移x1相對于外激勵的頻率響應函數為:

其中:
式中:ω1、ω2分別為主系統(tǒng)與吸振器的固有頻率,ω1=(k1/m1)1/2,ω2=(k2/m2)1/2,ξ1、ξ2分別為主系統(tǒng)與吸振器的阻尼比,ξ1=c1/2(m1k1)1/2,ξ2=c2/2(m2k2)1/2,α=ω2/ω1為吸振器與主系統(tǒng)的固有頻率比,μ=m2/m1為吸振器質量與主系統(tǒng)質量之比。
3 吸振器參數優(yōu)化
3.1 優(yōu)化問題的描述
吸振器的參數優(yōu)化是改善振動控制效果的重要途徑。電磁分支電路阻尼吸振器的主要工作參數包括m2、k2和c2。在游艇減搖控制研究中,船體受到的外載荷通常是隨機的,因此這里將主系統(tǒng)(游艇)的位移方差作為優(yōu)化目標函數,減小主系統(tǒng)的位移方差(即減小主系統(tǒng)的最大位移和最小位移之差),可有效提高船體的安全和穩(wěn)定性,并改善乘坐的舒適性。此時優(yōu)化問題可以描述為:


將式(15)和(16)代入方程(18)并經積分運算整理后,可得吸振器的優(yōu)化目標函數為:

其中:
3.2 基于PSO算法的優(yōu)化問題求解
對于式(17)描述的優(yōu)化問題,本文采用微粒群(PSO)優(yōu)化算法進行求解。PSO算法的基本原理是:假設在D維搜索空間中,有m個微粒組成一個微粒群,其中第i個微粒的空間位置為xi=(xi1,xi2,xi3,…,xiD),i=1,2,…,m,它是優(yōu)化問題的一個潛在解,將其代入優(yōu)化目標函數可以計算出相應的適應值,適應值可衡量xi的優(yōu)劣;第i個微粒所經歷的最好位置稱為其個體歷史最好位置,記為Pi=(pi1,pi2,pi3,…,piD);同時,每個微粒的飛行速度為Vi=(vi1,vi2,vi3,…,viD)。所有微粒經歷過的位置中的最好位置則為全局歷史最好位置,記為Pg=(pg1,pg2,pg3,…,pgD),相應的適應值為全局歷史最好適應值Fg。對每一代微粒,其第d維(1≤d≤D)根據如下方程進行迭代:

其中:β為慣性權值,w1和w2為加速系數;r1和r2是兩個在[0,1]范圍內變化的隨機數。搜索時,微粒的位置被最大位置和最小位置限制,同樣,微粒的速度也被最大速度和最小速度所限制。式(20)的第1項由微粒先前速度的慣性引起,為“慣性”部分;第2項為“認知”部分,表示微粒本身的思考,即微粒本身的信息對自己下一步行為的影響;第3項為“社會”部分,表示微粒間的信息共享和相互合作,即群體信息對微粒下一步行為的影響。
應用微粒群優(yōu)化算法對吸振器的參數進行優(yōu)化,表1給出了耦合系統(tǒng)的其它參數值[2],這里假定吸振器的質量給定,約為被控主系統(tǒng)質量的1/10,僅對k2和c2兩個參數進行優(yōu)化,其中k2的取值范圍為(1 000,10 000),c2的取值范圍為(10,5 000)。圖4給出了迭代過程,可以看到在迭代250次的時候達到了歷史全局最優(yōu)位置,最后得到的吸振器最優(yōu)參數為k2=2 074.3 N/m,c2=64.3 Ns/m。

表1 系統(tǒng)模型參數Tab.1 Model parameters
4 減搖數值仿真
基于以上得到的最優(yōu)參數,對采用電磁分支電路阻尼吸振器的游艇減搖進行數值仿真分析,仿真模型參數仍取表1中的數值。圖5給出了采用EMSDA前后的主系統(tǒng)位移頻率響應曲線,可以看出,在使用電磁分支電路阻尼吸振器后,船體搖擺頻響幅值大大降低,表明吸振器對船體的減搖效果是顯著的。由第1節(jié)討論可知,電磁分支電路阻尼吸振器的特點是可以通過調節(jié)分支電路的電阻來改變吸振器的電磁阻尼,從而獲得較好的吸振效果。因此,對于以上優(yōu)化得到的最優(yōu)阻尼c2,可以通過調節(jié)電磁分支電路中的電阻來實現,這里采用引用文獻[8]中的電路參數,取Cm=17.2 N/A,Re=111.8Ω,可計算得到分支電路的負電阻為-107.2Ω。為了進一步研究阻尼對減搖效果的影響,圖6給出了吸振器剛度參數不變,僅阻尼c2變化時的主系統(tǒng)位移幅頻響應曲線。由圖可見,減小吸振器阻尼,船體的搖擺頻響幅值增加,表明減搖效果變差,然而增大吸振器的阻尼,減搖效果改善并不顯著,此外從方程(8)和(11)可知,過度的增大阻尼將導致控制電流明顯增加,從而增加系統(tǒng)的功耗。因此,在實際情況中,應當調節(jié)電磁分支電路阻尼吸振器的阻尼至合適的值,才能獲得更好的游艇減搖綜合控制效果。
圖4 PSO的優(yōu)化過程與結果Fig.4 PSO optimization process and results
圖5 電磁分支電路阻尼吸振器的減搖效果Fig.5 The antirolling performance with EMSDA

圖6 吸振器阻尼對減搖效果的影響Fig.6 Effect of EMSDA damping on antirolling performance
5 結論
本文采用電磁分支電路阻尼吸振器研究了游艇的減搖控制問題,建立了游艇與吸振器的耦合動力學模型,采用粒子群優(yōu)化算法,以船體位移方差最小為目標函數,對動力吸振器的參數進行了優(yōu)化設計,并基于最優(yōu)參數進行了游艇減搖數值仿真研究,結論如下:
(1)采用優(yōu)化得到的工作參數,電磁分支電路阻尼吸振器能夠顯著的降低游艇船體位移的幅頻響應,從而驗證了優(yōu)化設計結果,同時表明了電磁分支電路阻尼吸振器在游艇減搖控制中的有效性。
(2)電磁分支電路阻尼吸振器具有電磁阻尼可調的優(yōu)點,可以方便地通過調節(jié)分支電路的負電阻來實現吸振器的最佳阻尼,因而為游艇的減搖控制提供了一種可行的技術方法。
[1]楊 輝,宋金龍.船舶減搖方式介紹及發(fā)展趨勢[J].江蘇船舶,2007,24(4):10-12.
YANG Hui,SONG Jin-long.Introduction and development trend of ship anti rolling mode[J].Jiansu Ship,2007,24(4):10-12.
[2]于立君.船舶減搖鰭/減搖水艙綜合減搖試驗裝置研究[D].哈爾濱:哈爾濱工程大學,2008.
[3] Harris C M.Shock and vibration handbook[M].McGraw-Hill,New York,USA,2002.
[4] Atkinson J A,Wilson A I.The application of a vibration absorber to propeller excited ship vibration[R].BSc Honors projectreport, May 1974, DepartmentofMechanical Engineering,University of Southampton.
[5]牛紅攀.電磁約束層阻尼與電磁分支電路阻尼技術結構振動控制研究[D].西安:西安交通大學,2008.
[6] Niu H P,Zhang Y H,Zhang X N,et al.Active vibration control of beam using electro-magnetic constrained layer damping[J].Chinese Journal of Aeronautics,2008,21(2):115-124.
[7]Niu H P,Xie S L,Zhang X N.Hybrid vibration control of a circular cylindrical shell using electromagnetic constrained layer damping treatment[J]. Journal of Vibration and Control,2009,15(9):1397-1422.
[8]周 瑞.電磁分支電路動力吸振器研究[D].西安:西安交通大學,2010.
[9]孫志卓,王全娟,王付山.一種主動電磁式動力吸振器的研究與設計[J].振動與沖擊,2006,25(3):198-201.
SUN Zhi-zhuo,WANG Quan-juan,WANG Fu-shan.Study and design of an active eletro-magnetic dynamic vibration absorbor[J].Journal of Vibration and Shock,2006,25(3):198-201.
[10] Forward R L.Electronic damping of vibrations in optical structures[J].Applied Optics,1979,18(5):690-697.
[11] Bonello P,Brennan M J,Elliott S J,et al.Designs for an adaptive tuned vibration absorber with variable shape stiffness element[J].Proceedings ofthe Royal Society A-Mathematical Physical and Engineering Sciences,2005,461:3955-3976.
[12] Cheng Y,Li D Y,Cheng L.Dynamic vibration absorbers for vibration control within a frequency band[J].Journal of Sound and Vibration,2011,330(8):1582-1598.
[13]繆 贇,屈文忠.隨機振動動力吸振器參數的最優(yōu)設計[J].振動、測試與診斷,2000,20(2):123-127.
MIAO Yun,QU Wen-zhong.Optimal design of parameters of random vibration absorber[J]. JournalofVibration Measurement& Diagnosis,2000,20(2):123-127.
[14]陳國初,俞金濤.微粒群優(yōu)化算法[J].信息與控制,2005,34(3):318-324.
CHEN Guo-chu,YU Jin-tao.Partical swarm optimization algorithm[J].Information and Control,2005,34(3):318-324.
[15] Kennedy J,Eberhart R C.Particle swarm op timization[A].Proc.of IEEE International Conference on Neural Networks[C].IEEE Service Center,Piscataway,1995:1942-1948.
[16] Reyes-Sierra M,Coello C A C.Multi-objective particle swarm optimizers:a survey of the state of the art[J].International Journal of Computational Intelligence Research,2006,2(3):287-308.
[17]王 淳,陳雅菊.基于多目標粒子群算法的動力吸振器參數優(yōu)化和決策研究[J].艦船科學技術,2009,31(11):46-50.
WANG Chun, CHEN Ya-ju. Multi-objective particle optimization and multi-attribute decision making study of dynamic vibration absorber[J]. Ship Science and Technology,2009,31(11):46-50.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(yè)(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45