一種融合縱橫時(shí)空特征的交通流預(yù)測方法
2023-11-17 13:25:28韓成艷
西安電子科技大學(xué)學(xué)報(bào) 2023年5期
侯 越,鄭 鑫,韓成艷
(蘭州交通大學(xué) 電子與信息工程學(xué)院,甘肅 蘭州 730070)
1 引 言
近年來,城市汽車保有量激增,道路網(wǎng)承載力不足,使得交通擁堵問題愈發(fā)嚴(yán)重。作為智能交通系統(tǒng)(Intelligent Transportation Systems,ITS)[1]的重要組成部分,交通流預(yù)測是信息誘導(dǎo)解決交通擁堵問題的主要技術(shù)手段。其通過挖掘多源數(shù)據(jù)中的隱藏特征,學(xué)習(xí)歷史交通流的變化規(guī)律為ITS提供流量分配決策依據(jù),從而為交通擁堵問題的解決提供智慧化的信息調(diào)配優(yōu)化方案。
交通流預(yù)測經(jīng)歷了統(tǒng)計(jì)學(xué)模型[2-3]、傳統(tǒng)機(jī)器學(xué)習(xí)模型[4-5]、深度學(xué)習(xí)模型3個(gè)階段。其中,深度學(xué)習(xí)因其強(qiáng)大的非線性擬合能力和深層特征提取能力成為目前的主流模型,如典型的卷積神經(jīng)網(wǎng)絡(luò)(Convolutional Neural Network,CNN)[6-7]、長短時(shí)記憶網(wǎng)絡(luò)(Long Short-Term Memory,LSTM)[8]、雙向長短時(shí)記憶網(wǎng)絡(luò)(Bidirectional Long Short-Term Memory,Bi-LSTM)[9]、門控循環(huán)單元(Gated Recurrent Unit,GRU)等。文獻(xiàn)[10]利用LSTM提取斷面交通流時(shí)序特征預(yù)測交通速度。文獻(xiàn)[11]利用一維卷積網(wǎng)絡(luò)提取斷面交通流的空間特征,利用LSTM、Bi-LSTM分別提取交通流短期、長期時(shí)間依賴特征。上述研究雖有效預(yù)測了斷面交通流,但未考慮上下游斷面間的縱向時(shí)空特性與斷面內(nèi)部多車道間的橫向時(shí)空特性對(duì)交通流預(yù)測的影響。文獻(xiàn)[12]基于相似性度量與能量歸一化捕捉到上下游斷面間的時(shí)滯特性,并利用LSTM預(yù)測斷面交通流。但該方法忽略了上下游斷面間交通流傳遞與回溯的空間流動(dòng)特性,未能充分挖掘上下游交通流潛在的縱向時(shí)空關(guān)系。文獻(xiàn)[13]利用LSTM、GRU實(shí)現(xiàn)快速路車道級(jí)速度預(yù)測,基于信息熵的灰色關(guān)聯(lián)分析有效提取了車道級(jí)交通流空間特征,然而該組合建模方式在提取時(shí)空特征時(shí),割裂了交通流時(shí)空特性提取的一致性,對(duì)交通流橫向時(shí)空關(guān)系捕捉不足。
針對(duì)上述問題,筆者提出一種融合縱橫時(shí)空特征的組合深度學(xué)習(xí)交通流預(yù)測模型(Bidirectional Long Short-Term Memory-Multiscale Convolution group-Attention,Bi-LSTM-MConv-Attention)。通過計(jì)算延遲時(shí)間量化消除上下游斷面間的交通流時(shí)滯特性;利用Bi-LSTM與向量拆分?jǐn)?shù)據(jù)輸入方式,捕捉消除時(shí)滯影響后上下游交通流雙向的時(shí)序特征與空間流動(dòng)特征,達(dá)到充分挖掘交通流縱向時(shí)空關(guān)系的目的。同時(shí)模型采用多尺度卷積群提取待預(yù)測斷面內(nèi)多車道多時(shí)間步下的橫向時(shí)空特征。最后構(gòu)建注意力融合模塊關(guān)注縱橫時(shí)空特征對(duì)交通流的動(dòng)態(tài)影響,并輸出最終交通流的預(yù)測值。
2 交通流縱橫時(shí)空相關(guān)性分析
2.1 縱向時(shí)空相關(guān)性分析
縱向時(shí)空相關(guān)性是指具有縱向延伸分布位置關(guān)系的斷面間,因交通流傳播與回溯的空間流動(dòng)性而引起的交通流時(shí)空關(guān)聯(lián)關(guān)系。在縱向延伸分布位置關(guān)系中,上下游斷面間的空間位置關(guān)系尤為典型。受空間位置關(guān)系及各車輛差異化駕駛行為的影響,上游交通流傳遞至下游會(huì)存在一定時(shí)延,這種在實(shí)際場景中普遍存在的現(xiàn)象稱為空間時(shí)滯性。為了更清晰地說明該現(xiàn)象,選用2016年9月9日上午6點(diǎn)至下午18點(diǎn),OpenITS合肥示范區(qū)2號(hào)和6號(hào)微波檢測器數(shù)據(jù)來繪制監(jiān)測斷面的流量日折線圖,如圖1所示。2號(hào)、6號(hào)檢測器分別位于路段上游和下游,具有縱向空間分布關(guān)系。由圖1可知,2號(hào)和6號(hào)檢測器監(jiān)測斷面的流量變化趨勢(shì)高度一致,這充分說明上下游斷面間存在較強(qiáng)的縱向時(shí)空關(guān)聯(lián)關(guān)系。同時(shí),2號(hào)檢測器的流量較6號(hào)檢測器始終提前抵達(dá)至波峰或波谷,這說明上下游斷面間存在明顯的空間時(shí)滯特性,這一特性會(huì)造成后續(xù)輸入模型的數(shù)據(jù)存在誤差,消除時(shí)滯性可增強(qiáng)上下游斷面間交通流數(shù)據(jù)的時(shí)空相關(guān)關(guān)系,從而有效提高預(yù)測精度。
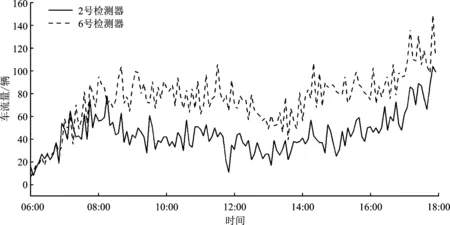
圖1 檢測器監(jiān)測斷面流量折線圖(每5分鐘一測)
2.2 橫向時(shí)空相關(guān)性分析
橫向時(shí)空相關(guān)性是指同一斷面內(nèi)車道級(jí)交通流數(shù)據(jù)間的相互關(guān)聯(lián)影響,是空間關(guān)系中另一種較為普遍的結(jié)構(gòu)分布。以O(shè)penITS合肥示范區(qū)黃山路與天智路交叉口黃山路西進(jìn)口斷面為研究對(duì)象,分析斷面內(nèi)車道間交通流存在的橫向時(shí)空相關(guān)性。圖2為研究斷面內(nèi)部車道分布圖,斷面內(nèi)包含5條車道:Htw001_1、Htw001_2、Htw002_1、Htw002_2、Htw002_3,各車道車輛行駛方向一致。選取5條車道于2016年9月10日上午6點(diǎn)至9月12日上午6點(diǎn)的流量數(shù)據(jù),采用皮爾遜相關(guān)系數(shù)計(jì)算各車道交通流數(shù)據(jù)間的關(guān)聯(lián)程度。表1為不同車道間皮爾遜相關(guān)系數(shù)計(jì)算結(jié)果,車道1~車道5依次為圖2中的Htw001_1、Htw001_2、Htw002_1、Htw002_2、Htw002_3車道。一般來說,皮爾遜系數(shù)值在0.8~1.0為極強(qiáng)相關(guān),0.6~0.8為強(qiáng)相關(guān),0.4~0.6為中等程度相關(guān),0.2~0.4為弱相關(guān),0.0~0.2為極弱相關(guān)或無相關(guān)[14]。由表1可知,不同車道間的皮爾遜系數(shù)值多高于0.6,可見同一斷面內(nèi)車道級(jí)交通流具有較強(qiáng)的橫向時(shí)空相關(guān)性。
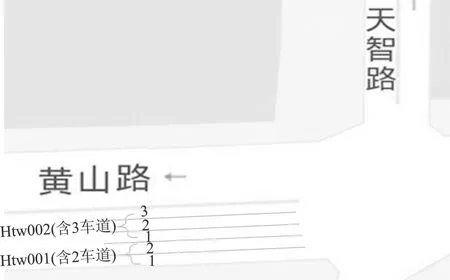
圖2 黃山路西進(jìn)口內(nèi)部車道分布圖
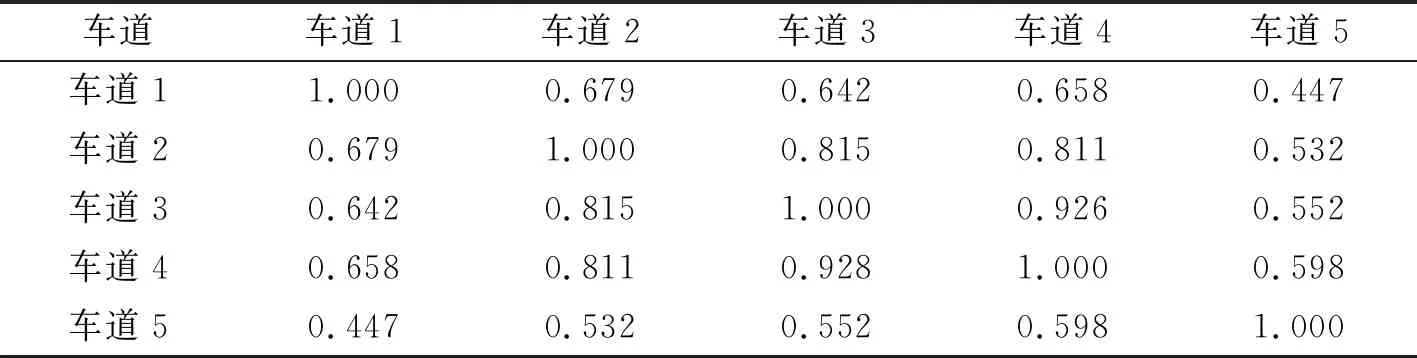
表1 車道流量間的皮爾遜相關(guān)系數(shù)
3 融合縱橫時(shí)空特征的交通流預(yù)測模型
為充分挖掘交通流細(xì)粒化時(shí)空關(guān)系,筆者提出一種融合縱橫時(shí)空特征的交通流預(yù)測模型(Bi-LSTM-MConv-Attention),圖3為模型架構(gòu)示意圖。模型包括縱向時(shí)空特征提取模塊、橫向時(shí)空特征提取模塊和注意力融合模塊,旨在捕捉交通流縱向、橫向時(shí)空特征以及縱橫時(shí)空特征對(duì)交通流預(yù)測的影響。模型的輸入包含上下游斷面實(shí)測交通流序列與下游斷面內(nèi)多車道交通流數(shù)據(jù),輸出為注意力權(quán)重向量與縱橫時(shí)空特征經(jīng)點(diǎn)積運(yùn)算得到的下游斷面交通流預(yù)測結(jié)果。

圖3 Bi-LSTM-MConv-Attention模型架構(gòu)圖
3.1 縱向時(shí)空特征提取模塊
該模塊首先通過計(jì)算延遲時(shí)間量化消除上下游斷面間交通流傳遞時(shí)的空間時(shí)滯影響,通過最佳時(shí)滯關(guān)系獲得上下游斷面強(qiáng)關(guān)聯(lián)性的交通流序列。其空間時(shí)滯延遲時(shí)間的計(jì)算如下所示:
(1)
(2)



圖4 Bi-LSTM結(jié)構(gòu)圖

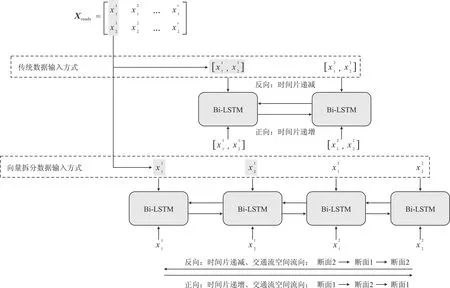
圖5 傳統(tǒng)數(shù)據(jù)輸入方式與向量拆分?jǐn)?shù)據(jù)輸入方式下Bi-LSTM提取過程對(duì)比圖
3.2 橫向時(shí)空特征提取模塊
該模塊利用多尺度卷積群(Multiscale Convolution group,MConv)提取待預(yù)測斷面內(nèi)車道間交通流不同時(shí)間步下的橫向時(shí)空特征。圖6為多尺度卷積群的運(yùn)算示意圖,多尺度卷積群由多個(gè)卷積核尺度不同的一維卷積層并列組成。因卷積核尺度不一,多尺度卷積群可同時(shí)捕捉多時(shí)間步下各車道間交通流的時(shí)空關(guān)系,對(duì)橫向時(shí)空特征的提取更為充分。多尺度卷積群的運(yùn)算過程如下:
hcorri=ReLU(Wi*Xlanes+bi) ,
(3)
(4)
其中,Xlanes∈RT×N代表多車道交通流數(shù)據(jù)矩陣,T為時(shí)間維度;N表示車道數(shù);hcorri為第i種尺度下卷積層提取到的橫向時(shí)空特征;ReLU為ReLU非線性激活函數(shù);Wi代表第i種尺度卷積層的卷積核權(quán)重矩陣;bi為偏置項(xiàng);*表示卷積運(yùn)算。m為多尺度卷積群中卷積核尺度類別數(shù);Hcorr為多尺度卷積群最終提取到的各車道間的橫向時(shí)空特征,其由各尺度卷積層提取到的橫向時(shí)空關(guān)系加和得到。
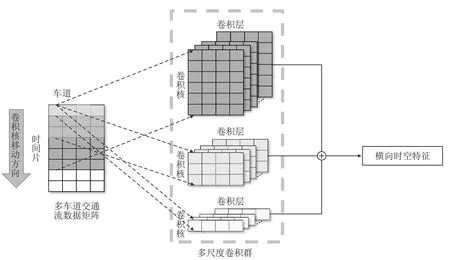
圖6 多尺度卷積群運(yùn)算示意圖
3.3 注意力融合模塊
為綜合考慮交通流縱橫時(shí)空特征對(duì)待預(yù)測斷面交通流的影響,模塊引入注意力機(jī)制[17]對(duì)縱橫時(shí)空特征進(jìn)行動(dòng)態(tài)融合,并通過點(diǎn)積運(yùn)算輸出最終預(yù)測值。注意力機(jī)制計(jì)算過程如下:
H=WX+b,
(5)
α=softmax(H) ,
(6)
y=α·X,
(7)
其中,X=[x1,x2,…,xn]為輸入向量,W為權(quán)重矩陣,b為偏置項(xiàng),·為點(diǎn)積運(yùn)算。首先,X經(jīng)W訓(xùn)練擬合捕捉X對(duì)輸出值的影響,得到隱藏層輸出H;然后,利用softmax函數(shù)對(duì)H進(jìn)行指數(shù)歸一化操作,得到輸入向量中各元素對(duì)輸出值的重要程度,即注意力權(quán)重向量α=[α1,α2,…,αn];最后,由X與α經(jīng)點(diǎn)積運(yùn)算得到注意力關(guān)注下的預(yù)測輸出值y。 文中模塊的輸入向量為縱橫時(shí)空特征拼接向量,輸出值y即為融合縱橫時(shí)空特征后的交通流預(yù)測值。
4 實(shí)驗(yàn)及分析
實(shí)驗(yàn)中斷面交通流數(shù)據(jù)源于OpenITS合肥示范區(qū)2號(hào)和6號(hào)微波檢測器采集到的交通流數(shù)據(jù)。圖7為檢測器位置分布圖,2號(hào)和6號(hào)檢測器分別位于路段上游和下游,兩檢測器間直線距離為1.5 km,依據(jù)節(jié)3.1式(2)可知上下游斷面間的時(shí)延約為2 min。車道交通流數(shù)據(jù)源于該示范區(qū)視頻檢測器采集的車道級(jí)交通流數(shù)據(jù),覆蓋6號(hào)檢測器監(jiān)測斷面內(nèi)的5條車道:Htw001_1、Htw001_2、Htw002_1、Htw002_2、Htw002_3,依據(jù)節(jié)2.2橫向時(shí)空相關(guān)性分析結(jié)果,選擇時(shí)空關(guān)聯(lián)性更強(qiáng)的4條車道:Htw001_1、Htw001_2、Htw002_1、Htw002_2為研究車道。數(shù)據(jù)集時(shí)間跨度為2016年9月9日至10月8日,實(shí)驗(yàn)預(yù)測對(duì)象為下游6號(hào)檢測器監(jiān)測斷面的交通流量。

圖7 斷面檢測器位置分布圖
4.1 評(píng)價(jià)指標(biāo)
為驗(yàn)證各模型的預(yù)測效果,實(shí)驗(yàn)選取平均絕對(duì)誤差RMAE(Mean Absolute Error,MAE)、均方根誤差RRMSE(Root Mean Square Error,RMSE)和決定系數(shù)R2(Coefficient of Determination)作為模型評(píng)價(jià)指標(biāo)。其中,RMAE、RRMSE值越小,模型預(yù)測效果越佳;R2值越大,模型預(yù)測效果越佳,R2值域在[0,1],值為1表示模型預(yù)測無誤差。它們的計(jì)算公式如下:
(8)
(9)
(10)

4.2 參數(shù)設(shè)置
實(shí)驗(yàn)中模型輸入數(shù)據(jù)的時(shí)間窗大小為12,即利用一小時(shí)12個(gè)時(shí)間片的歷史交通流來預(yù)測未來交通流。實(shí)驗(yàn)訓(xùn)練輪數(shù)為100,批次數(shù)為48,學(xué)習(xí)率為0.001,采用自適應(yīng)矩估計(jì)(Adaptive moment estimation,Adam)優(yōu)化器與均方差損失函數(shù)優(yōu)化訓(xùn)練誤差。模型中Bi-LSTM層隱藏單元個(gè)數(shù)為64,多尺度卷積群的卷積層尺度分別為6、3、1,各尺度卷積層層數(shù)為2。每層卷積后均有一層Dropout相連,目的是降低特征提取的過擬合現(xiàn)象。
4.3 實(shí)驗(yàn)結(jié)果分析
為評(píng)估所提模型的預(yù)測效果,實(shí)驗(yàn)將所提模型與時(shí)序預(yù)測中常用的LSTM、Bi-LSTM模型進(jìn)行對(duì)比,同時(shí)增加了縱橫時(shí)空特征及注意力機(jī)制的消融實(shí)驗(yàn)。實(shí)驗(yàn)結(jié)果如表2所示。
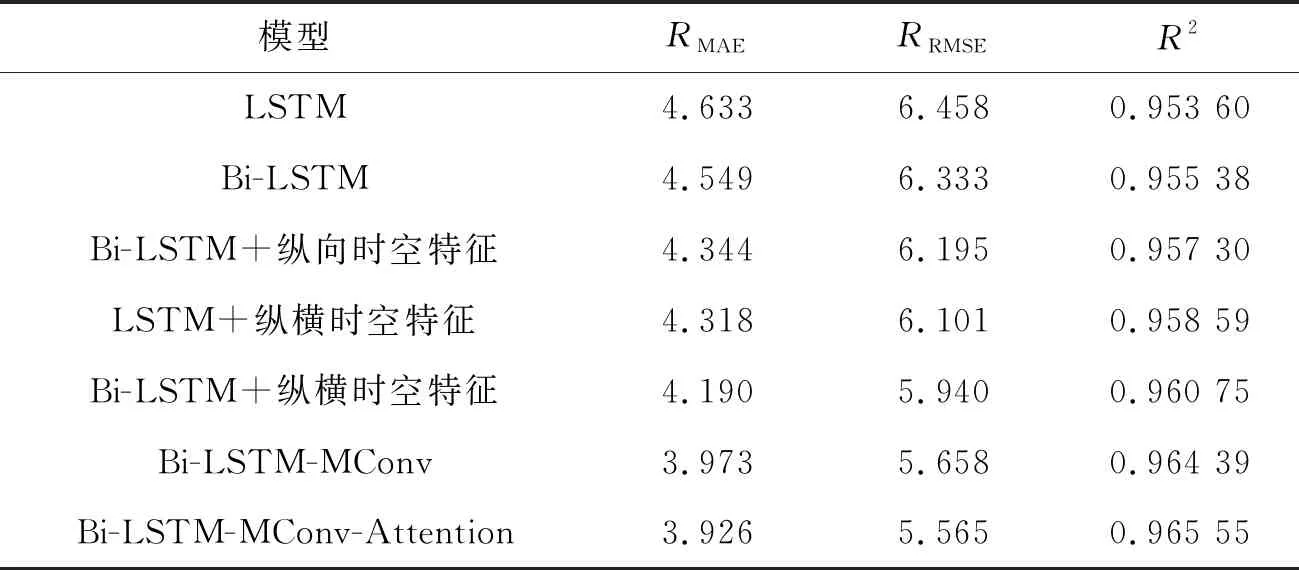
表2 模型單步預(yù)測效果
由表2可知,LSTM模型的平均絕對(duì)誤差、均方根誤差均高于其他模型,且R2最低,預(yù)測效果最不理想;Bi-LSTM模型的預(yù)測誤差略低于LSTM,這是由于Bi-LSTM模型的雙向特征學(xué)習(xí)結(jié)構(gòu),該結(jié)構(gòu)可充分考慮兩個(gè)方向的交通流變化規(guī)律,較之單向LSTM具有挖掘特征更充分的優(yōu)勢(shì)。相較于Bi-LSTM模型,Bi-LSTM+縱向時(shí)空特征模型的平均絕對(duì)誤差和均方根誤差分別降低了約4.51%和2.18%,R2也有一定程度的提高,可見對(duì)縱向時(shí)空相關(guān)性的考量可有效提高模型的預(yù)測精度;而LSTM+縱橫時(shí)空特征、Bi-LSTM+縱橫時(shí)空特征模型的預(yù)測效果較Bi-LSTM+縱向時(shí)空特征模型有顯著提升,這是由于綜合考慮縱橫時(shí)空特征有助于挖掘交通流細(xì)粒化的時(shí)空關(guān)系,從而提高預(yù)測精度;Bi-LSTM-MConv模型預(yù)測效果較優(yōu),其平均絕對(duì)誤差、均方根誤差值分別約為 3.973、5.658,R2值約為0.964 39,但其預(yù)測誤差仍高于筆者所提的Bi-LSTM-MConv-Attention模型,這充分說明所提模型中的注意力融合模塊豐富了模型對(duì)交通流縱橫時(shí)空特征的動(dòng)態(tài)關(guān)注,進(jìn)一步提高了預(yù)測精度。圖8為各模型在測試集上預(yù)測值與真實(shí)值的對(duì)比圖,結(jié)合圖8可知,相比其他基準(zhǔn)模型,所提Bi-LSTM-MConv-Attention模型的預(yù)測曲線與真實(shí)值曲線更為貼近,預(yù)測效果更優(yōu)。

(a) LSTM
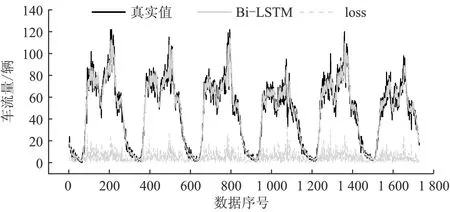
(b) Bi-LSTM

(c) Bi-LSTM+縱向時(shí)空特征
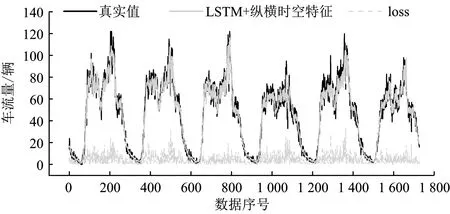
(d) LSTM+縱橫時(shí)空特征

(e) Bi-LSTM+縱橫時(shí)空特征

(f) Bi-LSTM-MConv
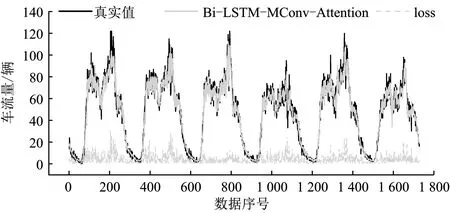
(g) Bi-LSTM-MConv-Attention
為進(jìn)一步驗(yàn)證所提模型的普適性,增加了中長時(shí)多步預(yù)測對(duì)比實(shí)驗(yàn),各模型在多步預(yù)測場景下的實(shí)驗(yàn)結(jié)果對(duì)比如圖9所示。分析圖9可知,筆者所提模型在各個(gè)預(yù)測步長下的RMAE、RRMSE始終最低,R2則最高,充分說明模型在中長時(shí)多步預(yù)測兼具優(yōu)越性,且模型更穩(wěn)定。
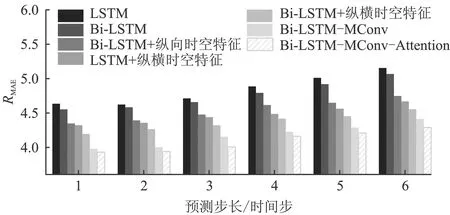
(a) RMAE
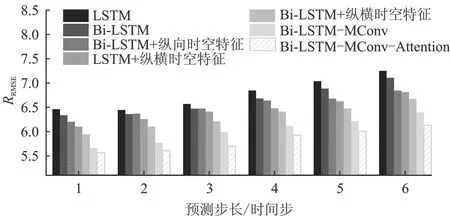
(b) RRMSE

(c) R2
5 結(jié)束語
為充分挖掘交通流序列縱橫向時(shí)空特征,增強(qiáng)交通流預(yù)測模型的精度和穩(wěn)定性,筆者提出了一種融合縱橫時(shí)空特征的交通流預(yù)測方法。該方法首先通過計(jì)算時(shí)延參數(shù),并利用該參數(shù)加調(diào)上游交通流序列時(shí)間戳的方式來消除空間時(shí)滯影響,以增強(qiáng)交通流序列的縱向相關(guān)性。接著通過Bi-LSTM和改進(jìn)的向量拆分?jǐn)?shù)據(jù)輸入方式提取到上下游交通流的縱向時(shí)空特征;利用MConv捕捉了車道級(jí)交通流在不同時(shí)間步下的橫向時(shí)空特征。最后引入注意力機(jī)制融合縱橫向時(shí)空關(guān)系,并通過注意力權(quán)重向量與縱橫時(shí)空特征的點(diǎn)積運(yùn)算得到最終的預(yù)測值。實(shí)驗(yàn)結(jié)果表明,所提方法的預(yù)測精度優(yōu)于其他對(duì)比方法,在單步預(yù)測和多步預(yù)測中,進(jìn)一步證明了該方法在實(shí)際路網(wǎng)擁堵背景下,能夠精確、穩(wěn)定地評(píng)估路網(wǎng)交通運(yùn)行狀態(tài)的事實(shí),為ITS系統(tǒng)功能升級(jí)和交管部門信息化智慧誘導(dǎo)方面提供了有效的技術(shù)支撐。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數(shù)學(xué)小靈通·3-4年級(jí)(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
