礦山井筒視覺監(jiān)測(cè)與故障智能識(shí)別系統(tǒng)設(shè)計(jì)*
2013-08-22 09:33:06邢遠(yuǎn)秀
金屬礦山 2013年9期
邢遠(yuǎn)秀
(1.冶金工業(yè)過(guò)程系統(tǒng)科學(xué)湖北省重點(diǎn)實(shí)驗(yàn)室;2.武漢大學(xué)計(jì)算機(jī)學(xué)院)
礦山井筒設(shè)施的主要檢查內(nèi)容包括鋼結(jié)構(gòu)、給排水管線、通風(fēng)管道及通訊設(shè)施的故障檢查,井壁是否滲水檢查,動(dòng)力設(shè)備運(yùn)行故障檢查等,目前的檢查定位和檢修質(zhì)量驗(yàn)收等工作主要依靠人工站在罐籠頂部來(lái)完成[1]。由于井筒內(nèi)工作條件比較惡劣,需要防止?jié)B水、罐籠晃動(dòng)和拋落重物的襲擊,停工檢查則降低了企業(yè)的生產(chǎn)效率。
隨著嵌入式和圖像處理等技術(shù)的不斷成熟,使得通過(guò)網(wǎng)絡(luò)平臺(tái),分散在各個(gè)點(diǎn)的運(yùn)行設(shè)備能夠進(jìn)行數(shù)據(jù)傳輸,從而進(jìn)行視頻監(jiān)控成為可能。國(guó)內(nèi)外針對(duì)于井筒安全檢測(cè)主要有基于傳感器的井壁監(jiān)測(cè)系統(tǒng)[2-3],基于視頻技術(shù)的井筒設(shè)施監(jiān)測(cè)系統(tǒng)[4-6]和井筒場(chǎng)景監(jiān)測(cè)系統(tǒng)[7-9],此類監(jiān)控系統(tǒng)大多采用有線傳輸,雖然能夠替代人工下井進(jìn)行場(chǎng)景及設(shè)備監(jiān)測(cè),但是設(shè)備位置固定使得監(jiān)測(cè)對(duì)象固定和設(shè)備不能共享,采集視頻完全由人工進(jìn)行判別。
隨后章啟忠等人提出的礦山井筒安全隱患監(jiān)測(cè)系統(tǒng)[1]將井筒設(shè)施的工作及生產(chǎn)狀況的實(shí)時(shí)圖像信息自動(dòng)采集、地面顯示、存儲(chǔ)并進(jìn)行管理。本研究在此基礎(chǔ)上進(jìn)一步降低系統(tǒng)成本,提高系統(tǒng)的防護(hù)性能,并實(shí)現(xiàn)對(duì)前端采集的視頻圖像進(jìn)行特征提取、對(duì)比、匹配,自動(dòng)識(shí)別故障點(diǎn)并定位。
1 系統(tǒng)組成
本系統(tǒng)由前端視頻數(shù)據(jù)采集子系統(tǒng)、無(wú)線傳輸子系統(tǒng)、地面圖像顯示控制子系統(tǒng)和視頻處理子系統(tǒng)4部分構(gòu)成。前端視頻數(shù)據(jù)采集子系統(tǒng)把井筒內(nèi)的情況采集成視頻,并進(jìn)行編碼、錄像存儲(chǔ);同時(shí)通過(guò)無(wú)線傳輸送到地面圖像顯示控制子系統(tǒng)終端進(jìn)行解碼顯示;視頻處理子系統(tǒng)除用戶管理、視頻導(dǎo)入、視頻查看、視頻管理和日志管理等基本功能之外,包括故障點(diǎn)智能監(jiān)測(cè)與定位。系統(tǒng)架構(gòu)框圖如圖1所示。
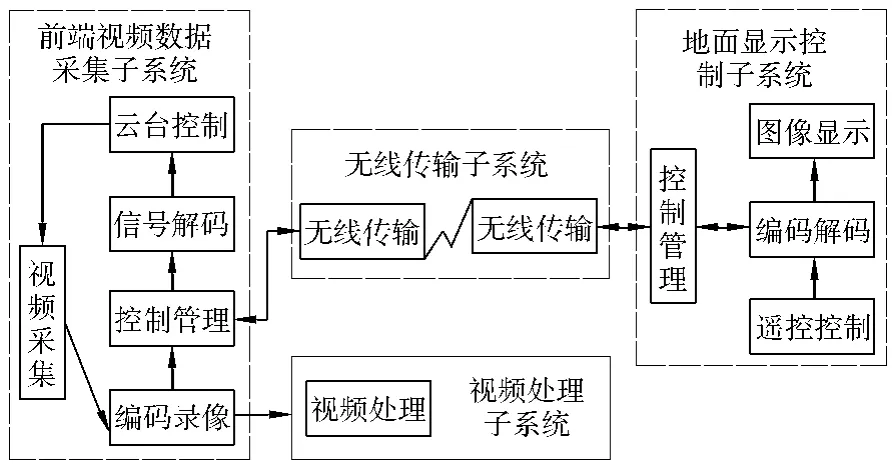
圖1 系統(tǒng)架構(gòu)框圖
本系統(tǒng)的無(wú)線傳輸子系統(tǒng)主要由前端無(wú)線信號(hào)接收裝置和無(wú)線視頻發(fā)送裝置,地面無(wú)線信號(hào)發(fā)送裝置和無(wú)線視頻接收裝置2大部分組成。其中前端無(wú)線信號(hào)接收裝置和無(wú)線視頻發(fā)送裝置嵌入在前端視頻采集子系統(tǒng)中,地面無(wú)線信號(hào)發(fā)送裝置和無(wú)線視頻接收裝置嵌入到地面遙控子系統(tǒng)中。
2 視頻采集與同步顯示
2.1 視頻采集裝置
前端視頻數(shù)據(jù)采集子系統(tǒng)為便攜式視頻采集裝置,主要用來(lái)采集現(xiàn)場(chǎng)原始的視頻數(shù)據(jù),在采集過(guò)程中將視頻實(shí)時(shí)存儲(chǔ),采集完成后供工作人員仔細(xì)觀察井筒設(shè)施實(shí)時(shí)的現(xiàn)狀以及數(shù)據(jù)備份。并同時(shí)將視頻通過(guò)無(wú)線傳輸?shù)降孛嫜b置,方便地面工作人員了解監(jiān)測(cè)區(qū)域和視頻采集裝置的運(yùn)行狀況。系統(tǒng)原理如圖2所示。
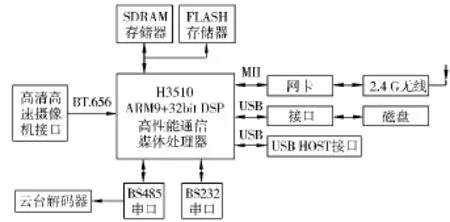
圖2 前端視頻數(shù)據(jù)采集子系統(tǒng)原理
視頻采集裝置的箱體上部固定了1臺(tái)可以360°旋轉(zhuǎn)的高速高清攝像機(jī),實(shí)現(xiàn)井筒監(jiān)測(cè)無(wú)死角,同時(shí)裝置2個(gè)高照度的光源,保證在井筒黑暗的環(huán)境中能獲得清晰的視頻。
視頻采集箱體內(nèi)部包括視頻編碼和存儲(chǔ)模塊、無(wú)線指令模塊、無(wú)線視頻模塊、電源模塊、智能控制模塊等多個(gè)功能模塊。采用雙硬盤存儲(chǔ)技術(shù),實(shí)時(shí)將視頻數(shù)字化、編碼和存儲(chǔ)。無(wú)線命令信號(hào)接收裝置接收地面遙控設(shè)備發(fā)來(lái)的命令,精確控制云臺(tái)旋轉(zhuǎn)的角度和攝像機(jī)的焦距和光圈。無(wú)線視頻信號(hào)發(fā)射裝置將視頻信號(hào)編碼發(fā)送到地面顯示設(shè)備,方便工作人員實(shí)時(shí)監(jiān)測(cè)及選取監(jiān)測(cè)的井筒方位。底部強(qiáng)力吸鐵伸縮裝置可以快捷方便地將箱體牢牢固定在罐籠頂部。
在進(jìn)行現(xiàn)場(chǎng)監(jiān)測(cè)之前,由工作人員將該裝置推到井筒罐籠頂部調(diào)整好位置,啟動(dòng)強(qiáng)力吸鐵裝置固定箱體。該裝置安裝、使用和維護(hù)簡(jiǎn)單和方便。在井筒監(jiān)測(cè)完畢之后,采集到的原始視頻數(shù)據(jù)已經(jīng)保存在圖像采集裝置中的硬盤陣列中,可以由工作人員通過(guò)USB接口導(dǎo)出,提交給視頻處理子系統(tǒng)。
2.2 視頻采集裝置的工作模式
章啟忠等人提出的礦山井筒安全隱患監(jiān)測(cè)系統(tǒng)[1]的視頻采集裝置為人工控制模式,地面圖像顯示及控制裝置根據(jù)用戶需要控制采集裝置云臺(tái)的方位及攝像頭的焦距。但是由于人工操作的隨意性,采集的視頻圖像的尺度和檢測(cè)方位不固定,使得后繼視頻處理子系統(tǒng)的故障智能判別處理受到限制。
為了提高系統(tǒng)的智能化,本系統(tǒng)的視頻采集裝置包含人工控制模式和智能控制模式2種工作模式。人工控制模式下的視頻采集方式和礦山井筒安全隱患監(jiān)測(cè)系統(tǒng)的工作方式相同,可以由監(jiān)控人員根據(jù)實(shí)際情況控制云臺(tái)的方向和攝像機(jī)的焦距。在智能控制模式下,則監(jiān)控人員不能對(duì)視頻采集裝置進(jìn)行人為控制,采集裝置固定對(duì)井筒各個(gè)方位依次進(jìn)行監(jiān)測(cè),所采集到的視頻圖像為故障智能識(shí)別提供了基礎(chǔ)數(shù)據(jù)。
2.4 地面顯示及遙控裝置
地面顯示遙控裝置原理如圖3所示。該裝置由電池、1個(gè)小型顯示屏、1個(gè)小鍵盤和操縱桿、無(wú)線命令信號(hào)發(fā)射裝置以及視頻信號(hào)接收裝置和解碼器6個(gè)部分構(gòu)成。當(dāng)按下接收設(shè)備開關(guān),裝置啟動(dòng)后屏幕上實(shí)時(shí)顯示前端圖像采集設(shè)備的攝像頭視角場(chǎng)景圖像。人工控制模式下,工作人員可以通過(guò)小鍵盤和操作桿隨時(shí)、精確控制云臺(tái)的旋轉(zhuǎn),使攝像機(jī)對(duì)準(zhǔn)井筒中需要特定監(jiān)測(cè)的設(shè)施,還可以調(diào)節(jié)攝像機(jī)的焦距和光圈。在智能模式下,小鍵盤的控制鍵和操作桿的功能則被屏蔽。
視頻采集裝置隨井筒罐籠上下運(yùn)動(dòng)過(guò)程中,地面遙控裝置的視頻信號(hào)接收模塊通過(guò)無(wú)線接收前端采集的視頻信號(hào),并由解碼器對(duì)視頻進(jìn)行解碼并顯示。工作人員可以通過(guò)地面接收設(shè)備的顯示屏實(shí)時(shí)觀察到攝像機(jī)采集的場(chǎng)景圖像。
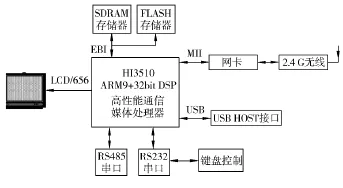
圖3 地面遙控裝置原理
3 關(guān)鍵技術(shù)
3.1 箱體防護(hù)技術(shù)
本系統(tǒng)的前端視頻采集裝置工作時(shí)置于井筒罐籠上方,井筒內(nèi)工作環(huán)境惡劣,設(shè)備既要求防水,又需要防重物撞擊。
視頻采集裝置使用一個(gè)標(biāo)準(zhǔn)鑄鋁防水密封箱把各個(gè)功能模塊密封起來(lái),起到防水、防撞擊的作用。密封箱遵循IEC60670,CEI23-24,IEC60529標(biāo)準(zhǔn),防護(hù)等級(jí)達(dá)到了IP66級(jí)別。同時(shí)裝置具有高抗沖擊、抗振動(dòng)性能,抗沖擊等級(jí)達(dá)到IK10級(jí)別。采集裝置具有良好的抗化學(xué)腐蝕性能,可工作在零下40~125℃溫度范圍的環(huán)境中。裝置中的攝像機(jī)采用半球形攝像機(jī),透明球罩采用3.5 mm左右厚度聚碳酸酯(PC)工程塑料和鑄鋁外殼。外置光源加裝鋁合金護(hù)罩,使得設(shè)備具有更好的防水性、耐腐蝕性、恒溫性和抗沖擊能力,以適應(yīng)礦井復(fù)雜的環(huán)境。
3.2 抗多徑干擾技術(shù)
由于井筒內(nèi)環(huán)境比較復(fù)雜,布線比較困難,所以無(wú)線傳輸方式成為了首選方式。而前端視頻采集裝置和地面顯示及遙控裝置在進(jìn)行遠(yuǎn)距離通信,傳輸大量的視頻圖像信息和控制命令信息,需要解決抗多徑干擾問(wèn)題。
本系統(tǒng)采用最先進(jìn)的COFDM(coded orthogonal frequency division multiplexing)調(diào)制技術(shù)、信道編解碼技術(shù)、差錯(cuò)控制技術(shù),使得設(shè)備能夠在高速移動(dòng)環(huán)境下實(shí)現(xiàn)視頻、語(yǔ)音、數(shù)據(jù)等寬帶多業(yè)務(wù)的實(shí)時(shí)、同步傳輸。COFDM技術(shù)應(yīng)用到礦山井筒無(wú)線傳輸中來(lái),提高信號(hào)在多徑下抗衰落能力和頻率利用率,為高速數(shù)據(jù)傳輸打下基礎(chǔ)。同時(shí)采用自適應(yīng)混合ARQ/FEC的差錯(cuò)控制技術(shù),限定重傳的次數(shù),以滿足實(shí)時(shí)的要求。基于編碼器端簡(jiǎn)單的反饋信息,統(tǒng)計(jì)跟蹤無(wú)線信道誤碼率,并對(duì)無(wú)線信道環(huán)境進(jìn)行預(yù)測(cè),自適應(yīng)地優(yōu)化冗余信息的大小,以達(dá)到無(wú)線視頻通信系統(tǒng)在抗差錯(cuò)能力和傳輸效率之間的最優(yōu)折衷。
3.3 故障智能判別技術(shù)
井筒檢測(cè)完畢后,由監(jiān)控人員將保存在前端硬盤中的視頻數(shù)據(jù)通過(guò)USB接口導(dǎo)出,按照罐籠號(hào)、檢測(cè)方位、檢測(cè)時(shí)間、檢測(cè)人員等信息導(dǎo)入數(shù)據(jù)庫(kù)中,提交給視頻處理子系統(tǒng),實(shí)現(xiàn)用戶管理、視頻導(dǎo)入、視頻查看、視頻管理和日志記錄和故障點(diǎn)的自動(dòng)判別等功能。
對(duì)于智能模式下采集的視頻圖像,首先對(duì)故障的顏色模型和形狀模型進(jìn)行預(yù)定義,通過(guò)對(duì)視頻中鄰近幀進(jìn)行相關(guān)性分析,對(duì)提取的多種特征進(jìn)行綜合判斷,最后做與故障相似物體的誤判斷分析,實(shí)現(xiàn)通過(guò)對(duì)不同時(shí)間、同一方位的井筒視頻圖像的特征值提取、比較,進(jìn)行智能判讀,自動(dòng)發(fā)現(xiàn)、定位井筒某一區(qū)域的故障點(diǎn)。具體判別步驟如下。
(1)故障的顏色模型的定義。顏色是故障的重要特征之一。首先選擇一系列有代表性的礦井故障圖片,獲取足夠多的不同故障區(qū)域中的像素點(diǎn),以這些點(diǎn)的顏色值作為故障顏色空間的采樣樣本。將樣本數(shù)據(jù)做成表格,在判斷某個(gè)像素點(diǎn)是否為故障時(shí),計(jì)算表格中每個(gè)樣本點(diǎn)與待判別像素點(diǎn)之間在顏色空間中的三維距離,統(tǒng)計(jì)距離小于一定閾值的樣本點(diǎn)的個(gè)數(shù),若個(gè)數(shù)較多,可認(rèn)為該像素點(diǎn)屬于故障區(qū)域。
(2)故障的形狀模型的定義。基于顏色分割后得到的故障的區(qū)域,可以計(jì)算出故障的形狀特征,例如故障的位置、面積、半徑、方向、重心、圓形度、層次結(jié)構(gòu)等等。考慮到礦井故障的實(shí)際情況,只選擇那些相對(duì)穩(wěn)定的形狀特征。位置由包圍故障像素點(diǎn)的矩形框確定,故障面積可由故障像素點(diǎn)的總數(shù)表示,故障輪廓可由故障區(qū)域邊緣的邊界鏈碼給出,而表示物體形狀復(fù)雜程度的圓形度可定義為故障輪廓周長(zhǎng)的平方與故障面積的比值。即使在圖像或視頻質(zhì)量較差的情況下,這些特征值仍然能夠大致描述故障的形狀。
(3)視頻中鄰近幀圖片的相關(guān)性分析。通過(guò)對(duì)視頻中鄰近幀圖片的相關(guān)性分析,得到故障信息的變化趨勢(shì)與運(yùn)動(dòng)特征。以初始幀為參考圖像,依次計(jì)算后繼幀與參考幀之間的差別,如果差別超過(guò)預(yù)定的閾值,則將當(dāng)前幀之前的系列圖像作為一個(gè)片段,并從當(dāng)前幀開始計(jì)算另一個(gè)新的片段。把視頻分割成為眾多片段后,再根據(jù)片段之間的關(guān)聯(lián)性進(jìn)行聚類操作,從而得到若干有意義的場(chǎng)景。
(4)與故障相似物體的誤判斷分析。經(jīng)過(guò)多特征綜合判斷后,仍然會(huì)有個(gè)別誤判現(xiàn)象。考慮到這種情況非常少,系統(tǒng)將為這樣的個(gè)例單獨(dú)建立一個(gè)樣本數(shù)據(jù)庫(kù),庫(kù)中的樣本將突出個(gè)例與待識(shí)別對(duì)象之間的細(xì)微差別,例如除了顏色與形狀外的紋理特征。對(duì)于所有被判斷為故障的區(qū)域,與個(gè)例樣本數(shù)據(jù)庫(kù)進(jìn)行比較,以進(jìn)一步判斷是故障還是其他相似物,可以減少誤判,提高故障識(shí)別的準(zhǔn)確率。
4 結(jié)論
本系統(tǒng)將嵌入式技術(shù)與現(xiàn)代化視頻圖像處理技術(shù)相結(jié)合應(yīng)用到井筒監(jiān)測(cè)中,研發(fā)了一套對(duì)礦山井筒設(shè)施及生產(chǎn)狀況進(jìn)行安全監(jiān)測(cè)的智能系統(tǒng),替代了傳統(tǒng)的人工檢查。前端視頻采集裝置實(shí)時(shí)采集、存儲(chǔ)及管理圖像視頻信息,并通過(guò)無(wú)線網(wǎng)絡(luò)傳輸?shù)降孛娼邮昭b置進(jìn)行實(shí)時(shí)監(jiān)測(cè),方便用戶查看每次監(jiān)測(cè)的視頻圖像,并通過(guò)對(duì)視頻數(shù)據(jù)深加工,進(jìn)而實(shí)現(xiàn)智能識(shí)別、定位故障點(diǎn)等功能。該系統(tǒng)操作方便、技術(shù)先進(jìn),可為礦山井筒安全生產(chǎn)、故障監(jiān)測(cè)提供全方面的有力保障。
[1] 章啟忠,等.礦山井筒安全隱患監(jiān)測(cè)系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)[J].金屬礦山,2009(6):130-131.
[2] Gibiec M.Prediction of machines health with application of an intelligent approach-a mining machinery case study[J].Key Engineering Materials,2005,293/294:661-668.
[3] 李 輝,郝建軍,何秋生.光纖傳感器技術(shù)在礦井安全監(jiān)測(cè)中的應(yīng)用[J].煤礦安全,2006(4):37-40.
[4] 羅水余,曾小舟,申秋學(xué).井眼彩色電視在鹽井檢測(cè)中的應(yīng)用[J].物探與化探,2005(4):365-366.
[5] 張恩侖.井下攝像技術(shù)在套損井檢測(cè)中的應(yīng)用[J].河南石油,2002(4):41-42.
[6] 馬海玉,玉王庭,孫 濤.云錫集團(tuán)松礦豎井牽引系統(tǒng)視頻監(jiān)控的開發(fā)應(yīng)用[J].礦業(yè)快報(bào),2008(1):72-74.
[7] 劉艷兵.數(shù)字礦山視頻監(jiān)控及導(dǎo)航系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)[D].北京:北京交通大學(xué),2009.
[8] Todd M,Ruff,MS PE.Feasibility of using intelligent video for machine safety applications[C]∥2008 IEEE Industry Applications Society Annual Meeting[S.l.]:Institute of Aeronautical Sciences,2008:1-5.
[9] Beus M J,Ruest M.New technology for hoist conveyance monitoring and analysis[J].CIM Bulletin,2002,1065:78-83.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50