基于GPS的恒溫晶振頻率校準系統的設計與實現
2013-08-20 04:57:44朱正平藍加平
電子設計工程 2013年8期
張 帆,陳 錕,朱正平,藍加平
(中南民族大學 電子信息工程學院,湖北 武漢 430074)
時鐘技術在現代科學技術中有著廣泛的應用,許多領域對時間指標的要求越來越高,如電力、通訊、軍事、航空航天等,都需要高精度的同步時鐘作為參考,協調整個系統的正常運行[1]。GPS是目前世界上應用范圍最廣、實用性最強的全球精密授時、測距和導航定位系統[2]。高精度頻標目前主要有銣鐘、銫鐘、氫鐘等原子鐘以及高精度晶體振蕩器。其中,高精度晶體振蕩器以其使用壽命長、價格較為便宜等優點,獲得了廣泛應用,但是晶體振蕩器會由于溫度、老化等因素產生頻率的漂移,長期穩定性較差。為了獲得一個短期及長期穩定度都比較優良的時間頻率標準,本系統以授時型GPS秒信號為參考,通過數字鎖相環對高穩晶振的頻率進行控制與修正,此方法具有便攜、廉價等優勢[3]。
1 GPS接收機測試及恒溫晶振選型
1.1 GPS接收機測試
系統選用并行12通道,正常接收衛星時,秒脈沖(1PPS)時間精度優于100 ns,并且輸出與秒脈沖完全同步的10 kHz信號的Jupiter授時型GPS接收機。由于天線角度、電離層、對流層、多徑效應、接收機自身特性的影響,GPS會產生失鎖或者雖然鎖定但秒信號抖動較大,此時測得的時差數據有很大的噪聲分量[4]。在同一地點,當兩臺Jupiter授時型GPS接收機都正常接收衛星時,連續10小時以一臺GPS的1PPS作為基準,對比另一臺GPS的1PPS到達時刻,繪出到達時間差的柱狀統計圖,從圖1中可得出,兩臺GPS接收機正常運行時,兩個1PPS信號的時間差99%以上集中在0~100 ns之間,時間差的均值是54 ns,主要是由GPS天線引起;計算出均方差為7.64 ns,可以看出兩臺Jupiter GPS接收機的1PPS信號一致性很高,抖動較小。但是對于隨機誤差引起的1PPS跳變或者GPS接收機偶然鎖星失敗,雖然也輸出1PPS信號,但其精度較低不能作為基準源[5]。
1.2 恒溫晶振選型
GPS接收機輸出的1PPS信號存在較大的隨機誤差,但是沒有累計誤差,而恒溫晶振時鐘信號的隨機誤差較小,不過由于自身老化和外界溫度等一些因素的影響,存在頻率漂移現象,具有較大的累計誤差。如果恒溫晶振長期不間斷的運行,頻率無法滿足工作所需的準確度與穩定度,因此需要通過實時的自動調控壓控端電壓來進行頻率校準。根據衛星時鐘信號和恒溫晶振時鐘信號精度互補這一特點,通過調控恒溫晶振的壓控端,使其輸出頻率隨之改變,以維持短期和長期的時間精度和穩定性[6]。

圖1 Jupiter GPS對比測試Fig.1 Comparison test of Jupiter GPS
恒溫晶振選用俄羅斯莫里恩(Morion)公司的低漂移、低相噪薄型雙恒溫槽超精密恒溫晶體振蕩器OCXO MVl80。該恒溫晶振輸出標準頻率為10 MHz的正弦波,短期穩定度小于 2×10-12/秒,年老化率為±1×10-8/年,對周圍環境變化敏感度低,長期溫度-頻率穩定度可達±1×10-10,還提供了一個直流電壓控制端。通過向壓控端施加一個0~+5 V的直流電壓,可使該恒溫晶振有±5 Hz左右的頻率調整范圍,控制電壓與晶振頻率的近似關系如表1所示。
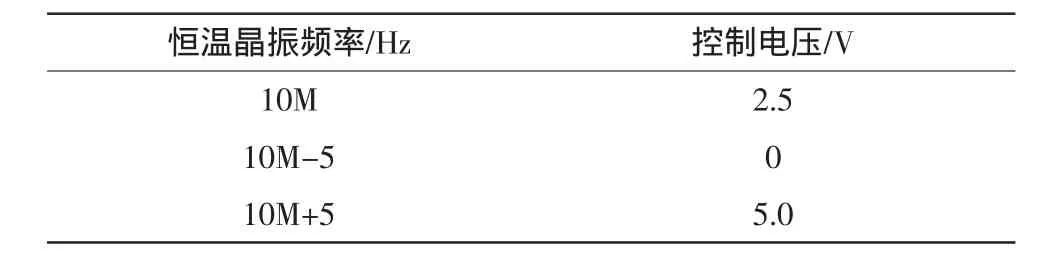
表1 控制電壓與頻率近似關系Tab.1 Similarity relation of control voltage and frequency
2 系統設計
系統以FPGA作為控制器,芯片選用Altera公司的EP3C25E144C8,內部具有豐富的邏輯資源。開發平臺是Quartus II集成開發環境,采用Verilog HDL語言對各功能模塊進行邏輯描述,并完成了邏輯編譯、邏輯化簡、綜合及優化、邏輯布局布線,并使用Modelsim、Signalnap II進行邏輯仿真,實現系統的設計要求,系統的原理框圖如圖2所示。

圖2 系統原理框圖Fig.2 Block diagram of system principle
2.1 數字鎖相環
恒溫晶振的頻率調整功能是靠數字鎖相環(DPLL)實現的,同模擬鎖相環類似,它屬于閉環的控制系統,由鑒相器(PD)、環路濾波器(LPF)、D/A 轉換器、壓控恒溫晶振(OCXO)組成。系統啟動后,在FPGA內部,數字鑒相器模塊首先以GPS接收機輸出的10 kHz時鐘信號作為基準源,對恒溫晶振整形并經過分頻后的10 kHz信號進行快速鑒相,用恒溫晶振倍頻后的300 MHz時鐘對相位差進行量化,得到具體的超前或滯后數據,進而傳遞給環路濾波器模塊,設置抖動門限參數,若相位超前或滯后量達到門限值,則迅速通過D/A轉換器,對晶振的壓控端電壓進行相應調節。此方法可令晶振頻率快速接近10 MHz,但是恒溫晶振頻率的改變需有一定的響應時間,快速調整壓控端的電壓會產生過調現象,頻率穩定度不佳。
為進一步提高晶振頻率的精度與穩定性,結合恒溫晶振短期穩定度高的特點,在數字鑒相器模塊中,以GPS的1PPS信號為基準,測量1PPS與恒溫晶振分頻出的1 Hz信號的相位差。依據GPS沒有累積誤差的優點,在環路濾波器模塊中采用滑動平均濾波法來降低GPS秒脈沖對測量帶來的干擾[7],設計FIFO存儲器來配合計算出最近200 s的平均相位差,通過不斷對比短時的相位差及長時的平均相位差[8],分析相位差的長期與短期變化動態,實時調節恒溫晶振的控制電壓,保證晶振輸出穩定且準確的10 MHz時鐘信號。晶振頻率調整的過程如圖3所示,此方法簡單實用,可有效抑制1PPS抖動對晶振造成的影響。
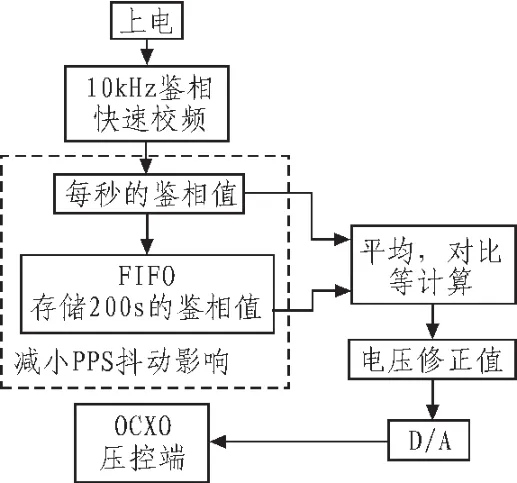
圖3 晶振頻率調整流程圖Fig.3 Flowchart of frequency calibration
2.2 電路設計
D/A芯片選用TI公司TLV5616,它是低功耗單片12位串行數模轉換器,分辨率為4096,該芯片采用三線制(SCLK、SYNC、DIN)串行接口,SCLK方波信號為下降沿時,TLV5616讀取DIN的電平信號,轉化成相應的電壓送往恒溫晶振,用于晶振的微調[9],晶振頻率調整硬件電路如圖4所示。
2.3 授時功能
在許多現實的應用中需要毫秒、微秒、納秒等這些更小的時間單位量,但是GPS接收機一般只能提供最小時間單位為秒的UTC時間,本系統在GPS基礎上設計了授時功能[10]。
授時工作流程如圖5所示,系統在FPGA中設計串口數據模塊來接收GPS的SDO1管腳發出的GPRMC格式數據,并將其存放在FPGA內部的雙口RAM中,通過串口數據模塊及數字鑒相器模塊可以判斷GPS接收機是否正常工作。若識別出準確的UTC時間和1PPS信號后,授時模塊迅速從RAM中提取最新時間數據進行處理,得到初始時間值,當下一個1PPS上升沿到來后,系統在初值的基礎上開始完全依靠高穩恒溫晶振自行走時,并每隔5秒與準確的1PPS信號進行校對,如果發現本系統的時間與1PPS不同步,那么系統時間將會短暫停滯或快速跳進,達到與1PPS同步,保證時間信息輸出的連續性與準確性;若GPS接收機非正常輸出1PPS信號,則不進行校對,直到1PPS正常后再恢復校對功能。
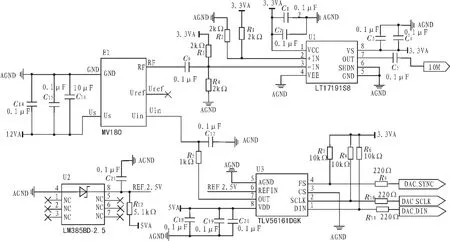
圖4 晶振頻率調整電路圖Fig.4 Circuit of frequency calibration
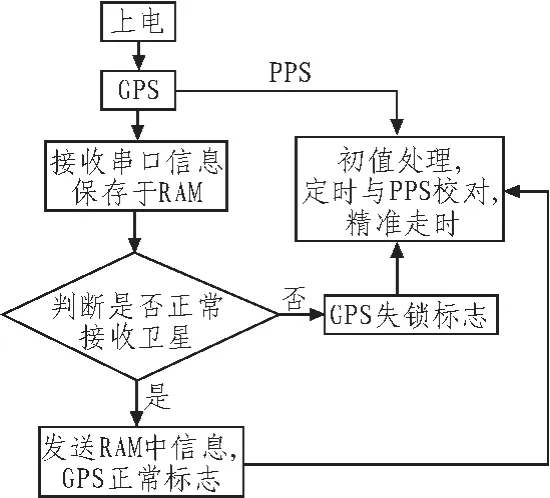
圖5 授時工作流程圖Fig.5 Flowchart of time service
3 實驗結果
在衛星信號正確接收的情況下,系統可以在短時間內把恒溫晶振的頻率校準到較高的準確度與穩定度上。實驗結果表明,恒溫晶振被調節后可以輸出更準確的10 MHz信號,誤差小于0.01 Hz,頻率的精度與長期穩定性都得到明顯改善。1PPS信號沒有累計誤差,在連續不重復的201個1PPS上升沿之間,即以200 s作為閘門時間,測出恒溫晶振MV180在調控與未調控狀態時,每200 s的平均頻率偏差,圖6為部分實際測試圖,實線和虛線分別代表恒溫晶振在調控與未經調控狀態的測試結果,其中實線部分的平均頻率偏差是-7.41×10-5Hz,均方差為 3.10×10-3Hz。
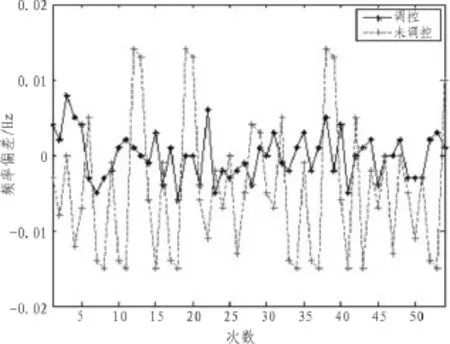
圖6 每200秒恒溫晶振的平均頻率偏差Fig.6 200s average frequency deviation of OCXO
依照文中方案設計兩套完全獨立的系統,以其中一套系統的恒溫晶振的時鐘信號為基準,每秒與另一套系統的恒溫晶振的時鐘信號對比一次,相位差用300 MHz的時鐘進行量化,測量分辨力為3.3 ns,部分測試結果如圖7所示。圖7(a)顯示每秒測得的相位差;由于存在測量誤差,因此采用滑動平均濾波的方法,在每秒測量兩套系統相位差的同時,計算出最近200次的平均相位差,如圖7(b)所示。表2對圖7的實際測量數據進行統計,7(b)中的均方差是0.68度,四分位差為0.60度,說明兩套獨立系統的頻率一致性很高,具有良好的穩定度。
恒溫晶振經過校準后的頻率偏差小于0.01 Hz,在1PPS準確輸出時,累加1PPS具有的100 ns誤差,授時模塊輸出的時間信息誤差小于105 ns。當GPS接收機未正常工作時,由于恒溫晶振前期經過頻率校準和自身較高的穩定度,在一定時間內依然可以保證高精度的授時功能。
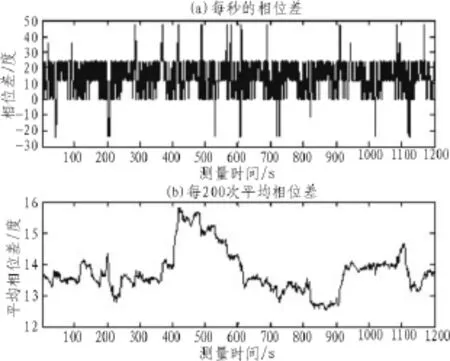
圖7 兩套系統的相位差Fig.7 Two systems phase difference

表2 圖7中相位差的統計Tab.2 Figure 7 phase difference statistics
4 結束語
由文中的分析和詳細的實驗結果可知,基于GPS的秒信號對恒溫晶振頻率偏移的自動測量以及對晶振壓控端電壓的自動控制,使晶振受老化和外界干擾的影響得到了明顯的抑制,能夠在較短時間內將晶振校準到較高的頻率準確度上,并提高長時間的穩定性。晶振頻率準確度的顯著提高,也有利于對授時功能的設計。總之,該系統采用實用簡便的方法達到了將恒溫晶振調整到較高指標的目的,具有廣泛的應用價值。
[1]謝強,錢光弟.基于授時GPS的高精度頻率源設計與實現[J].工業控制計算機,2007,20(3):15-16.
XIE Qiang,QIAN Guang-di.Design and realization of highprecise frequency source based on timing GPS[J].Industrial Control Computer,2007,20(3):15-16.
[2]張瑩,周渭,梁志榮.基于GPS鎖定高穩晶體振蕩器技術的研究[J].宇航計測技術,2005,25(1):54-58.
ZHANG Ying,ZHOU Wei,LIANG Zhi-rong.Research of techniques to lock high-stability crystal oscillators based on GPS[J].Journal of Astronautic Metrology and Measurement,2005,25(1):54-58.
[3]CHENG Chia-Lung,CHANG Fan-ren,TU Kun-yuan.Highly accurate real-time GPS carrier phase-disciplined oscillator[J].IEEE Transactions on Instrumentation and Measurement,2005,2(54):819-824.
[4]馬濤,焦群.基于卡爾曼濾波算法GPS校鐘系統的設計[J].電力系統通信,2009,32(219):66-68.
MA Tao,JIAO Qun.Design of GPS clock calibration system based on Kalman filteralgorithm [J].PowerSystem Communication,2009,32(219):66-68.
[5]許國宏,李鐵成,李星.基于GPS馴服技術的高穩頻蹤設計[J].電子設計工程,2010,18(4):63-65.
XU Guo-hong,LI Tie-cheng,LI Xing.Design of high stability frequency synthesizer based on GPS tame technology[J].Electronic Design Engineering,2010,18(4):63-65.
[6]郭芳.用GPS秒信號鎖定高頻振蕩器的方法研究 [J].時間頻率學報,2004.12(27):94-101.
GUO Fang.Research of techniques to lock high frequency oscillator based on PPS[J].Journal of Time and Frequency,2004,12(27):94-101.
[7]盧祥弘,陳儒軍,何展翔.基于FPGA的恒溫晶振頻率校準系統的設計[J].電子技術應用,2010(7):101-104.
LU Xiang-hong,CHEN Ru-jun,HE Zhan-xiang.The design of frequency calibration system for OCXO based FPGA[J].Application of Electronic Technique,2010(7):101-104.
[8]CUI Bao-jian,HOU Xin-gao,ZHOU De-hai.Methodological approach to GPS disciplined OCXO based on PID PLL[C]//The Ninth International Conference on Electronic Measurement&Instruments,Huludao,2009:528-533.
[9]黨曉圓,單慶曉,肖昌炎,等.基于GPS與北斗雙模授時的壓控晶振校頻系統的研究與設計[J].計算機測量與控制,2009,17(11):2246-2248.
DANG Xiao-yuan,SHAN Qing-xiao,XIAO Chang-yan,et al.Research on voltage-controlled crystal oscillator calibration based on GPS&BD double time service[J].Computer Measurement&Control,2009,17(11):2246-2248.
[10]文躍秀,韓寶民,邱燦,等.一種GPS定位技術在繪制10 kV電氣線路地理接線圖中的應用[J].陜西電力,2012(5):22-25,38.
WEN Yue-xiu,HAN Bao-min,QIU Can,et al.Application of GPS technology in 10 kV electrical lines geographical wiring diagram[J].Shaanxi Electric Power,2012(5):22-25,38.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25