基于MEMS的GPS/SINS艦船組合導(dǎo)航系統(tǒng)設(shè)計
2013-08-11 01:48:26薇廖林煒
船舶 2013年1期
關(guān)鍵詞:系統(tǒng)
郭 薇廖林煒
(1.海軍駐武漢438廠軍事代表室 武漢430064;2.海軍駐中南地區(qū)光電系統(tǒng)軍事代表室 武漢430073)
0 引 言
GPS/SINS組合導(dǎo)航系統(tǒng)是組合式慣性導(dǎo)航系統(tǒng)中的一種重要類型,它包括捷聯(lián)慣性導(dǎo)航系統(tǒng)(Strap-down Inertial Navigation System,SINS)和全球定位系統(tǒng)(Globe Position System,GPS)兩個部分。其中,GPS易受地形地物的影響而導(dǎo)致定位中斷,并且受制于人;SINS導(dǎo)航精度高、自主性強、隱蔽性好,但定位誤差隨時間積累。GPS和SINS這種互補的特點使得兩者的組合有很好的效果,并且可以廣泛應(yīng)用于艦載導(dǎo)航、機載導(dǎo)航和提高反艦導(dǎo)彈的精確制導(dǎo)效率等場合[1-2]。
MEMS(Micro Electro Mechanical System)即微機電系統(tǒng),是指可以批量制造的,集微型結(jié)構(gòu)、微型傳感器、微型執(zhí)行器以及信號處理電路、接口、通訊和電源于一體的微型器件或系統(tǒng)。它以硅半導(dǎo)體材料為加工對象,采取專用集成電路制造技術(shù)把功能強大、復(fù)雜可靠的系統(tǒng)置于一個小小的硅片上,從而極大地拓寬了其設(shè)計及運用空間。自上世紀80年代MEMS概念被提出以來,MEMS技術(shù)在汽車工業(yè)、生物醫(yī)學(xué)、航空航天等領(lǐng)域得到了廣泛應(yīng)用。隨著MEMS技術(shù)的不斷發(fā)展,微型慣性導(dǎo)航器件體積越來越小,精度越來越高。這就使得加速度計和陀螺儀安裝在載體上變得簡單易行,從而使GPS/SINS組合導(dǎo)航系統(tǒng)的可行性大大提高。一直以來,海軍艦艇對導(dǎo)航的要求是在海洋的任何一個區(qū)域長時間工作,這就對導(dǎo)航的精度和穩(wěn)定性有著很高的要求。本文設(shè)計的基于MEMS的艦船慣性導(dǎo)航系統(tǒng)恰好滿足了這一需求。
1 原理和結(jié)構(gòu)
1.1 捷聯(lián)式慣導(dǎo)系統(tǒng)
捷聯(lián)式慣導(dǎo)系統(tǒng)將加速度計和陀螺儀的基座與載體直接固聯(lián),載體轉(zhuǎn)動時,加速度計和陀螺儀的敏感軸指向也隨之轉(zhuǎn)動。系統(tǒng)通過陀螺儀測量載體的角運動,計算得到載體的姿態(tài)角,確定加速度計敏感軸的指向;通過坐標變換,將加速度計輸出的比力信號轉(zhuǎn)換到另一計算比較方便的導(dǎo)航坐標系上,進行導(dǎo)航計算。與平臺式慣性導(dǎo)航系統(tǒng)相比,捷聯(lián)式慣導(dǎo)系統(tǒng)沒有復(fù)雜的機械式慣性平臺,結(jié)構(gòu)簡單,體積小,成本低,容易安裝與維護。捷聯(lián)式系統(tǒng)也存在明顯缺點:陀螺儀和加速度計直接安裝在載體上,要承受較大的振動和沖擊且工作的動態(tài)范圍較大,因此需要有高精度的陀螺儀和進行捷聯(lián)陀螺的誤差補償才能保證系統(tǒng)的穩(wěn)定與可靠,同時計算量大,精度較低。
1.2 GPS/SINS組合導(dǎo)航系統(tǒng)
GPS是以人造衛(wèi)星為基礎(chǔ)的無線電導(dǎo)航系統(tǒng),在地球的任何位置、任何時刻只要能同時觀測到4顆以上的衛(wèi)星,就可以得到用戶的三維坐標、三維速度分量和精確定位,其精度不隨時間變化而變化。因此,可以將高精度的GPS信息作為外部量測輸入,在載體的運動過程中頻繁修正SINS以控制其誤差隨時間的積累,通過此法可大幅度提高微慣性測量的精度。這就是基于MEMS的GPS/SINS組合導(dǎo)航的基本思想,其設(shè)計系統(tǒng)結(jié)構(gòu)如圖1所示。
該系統(tǒng)包括捷聯(lián)慣導(dǎo)系統(tǒng)和GPS系統(tǒng)兩部分。捷聯(lián)慣導(dǎo)系統(tǒng)(SINS)是其核心部分,包含3個微激光陀螺和3個微加速度計,可將GPS部分的數(shù)據(jù)通過卡爾曼濾波器輔助系統(tǒng)對捷聯(lián)慣導(dǎo)進行修正。另外將微加速度計和微陀螺儀安裝在轉(zhuǎn)位機構(gòu)上,一方面可以隔離系統(tǒng)受艦船運動的影響,另一方面作為船塢對準中的一個部分,易于對單個傳感器進行標定[3]。

圖1 基于MEMS的GPS/SINS艦船導(dǎo)航系統(tǒng)結(jié)構(gòu)框圖
2 設(shè)計關(guān)鍵技術(shù)
2.1 SINS系統(tǒng)的計算
為從微陀螺儀及加速運動計的測量值中提取姿態(tài)、位置、速度的信息,需對SINS系統(tǒng)參數(shù)進行求解,包括姿態(tài)確定、比力分解和導(dǎo)航方程等的解,計算框圖如圖2所示。其中姿態(tài)計算和導(dǎo)航計算是技術(shù)中較難實現(xiàn)的部分。
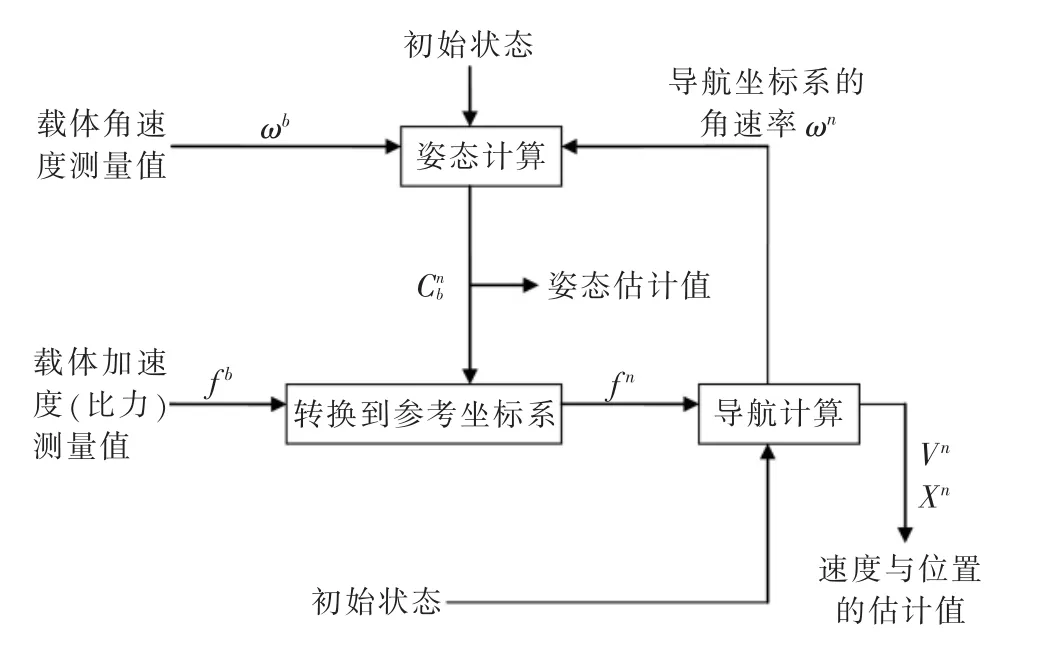
圖2 SINS系統(tǒng)計算框圖
2.1.1 姿態(tài)估計
運載體相對于一個坐標系的姿態(tài)對導(dǎo)航起著至關(guān)重要的作用,通過使用微陀螺儀提供的回轉(zhuǎn)速率測量值,可以不斷更新運載體的姿態(tài)值。姿態(tài)表達式的一般形式有方向余弦表達式、歐拉角表達式和四元數(shù)表達式。
方向余弦陣是一個3×3的矩陣,矩陣的列代表單位矢量在載體系中沿參考軸系的投影,可表示為式(1):

其中第i行和第j列的元素代表參考系i軸和載體系j軸之間夾角的余弦。
歐拉角的表示法是基于坐標變換時繞軸的旋轉(zhuǎn)實現(xiàn)的,例如從參考軸系到新坐標系的轉(zhuǎn)換過程中,繞參考系z軸旋轉(zhuǎn)ψ角;繞新坐標系y軸旋轉(zhuǎn)θ角;繞新坐標系x軸旋轉(zhuǎn)φ角。其中θ,ψ和φ為歐拉旋轉(zhuǎn)角。從參考系到運載體軸系的轉(zhuǎn)換可表述為式(2):

四元數(shù)姿態(tài)表達式是基于坐標轉(zhuǎn)換時可以用定義在參考坐標系的一個矢量的單個旋轉(zhuǎn)來實現(xiàn),四元數(shù)表示為,將載體系上的矢量用四元數(shù)來表示,通過公式即可得到參考系上的表示為=C,其中

2.1.2 導(dǎo)航計算
以導(dǎo)航坐標系為基準,導(dǎo)航方程可表示為式(4):

通過導(dǎo)航計算可以實時獲得運動載體的運動速度,參與SINS系統(tǒng)計算。
2.1.3 數(shù)據(jù)獲取
通過以上計算和估計,按照圖1中的步驟完成GPS與MEMS捷聯(lián)系統(tǒng)的組合導(dǎo)航解算,獲得定位信息,另外通過誤差補償進一步提高定位信息的精度。
2.2 誤差補償
MEMS中的微加速度計精度要求已很高,如加速度芯片ADXL250標度因數(shù)為38 mV/g,在±1g范圍內(nèi)靈敏度為0.0380 mV/g,線性度為0.73%,基本滿足艦船系統(tǒng)的導(dǎo)航要求。事實上,陀螺儀誤差才是影響系統(tǒng)性能和精度的重要方面,這部分誤差包括系統(tǒng)誤差和隨機游走誤差。其中系統(tǒng)誤差可以通過轉(zhuǎn)位程序?qū)ν勇葸M行標定,這需要用到卡爾曼濾波。從圖1可以看出,接收位置(緯度/經(jīng)度)信息,并與慣導(dǎo)系統(tǒng)得到的精度和緯度的估計值進行比較,該差值作為卡爾曼濾波器的輸入信息,通過卡爾曼濾波器后給出系統(tǒng)誤差狀態(tài)的估計值來修正系統(tǒng)。
3 應(yīng)用前景
基于MEMS的GPS/SINS艦船慣性導(dǎo)航系統(tǒng)融合了GPS系統(tǒng)和慣性導(dǎo)航系統(tǒng)的優(yōu)點,是一種新型的組合導(dǎo)航方式,可廣泛應(yīng)用于航空、航天、航海等方面,且整套系統(tǒng)具有可靠性高、實時性強、微小型等特點,在軍用和民用領(lǐng)域具有廣闊的應(yīng)用前景。
4 結(jié) 論
本文所設(shè)計的基于MEMS的GPS/SINS艦船導(dǎo)航系統(tǒng)充分利用了MEMS導(dǎo)航設(shè)備的精度高、體積小、成本低等優(yōu)良特性,實現(xiàn)了自主式慣性測量,且隱蔽性好、重量輕,在GPS的輔助下具有更可靠的準確性,為未來艦船導(dǎo)航提供了一個重要的發(fā)展方向。
[1]劉愛元,李彪,祝萌.卡爾曼濾波在某型組合導(dǎo)航系統(tǒng)模擬器中的應(yīng)用[J].海軍航空工程學(xué)院學(xué)報,2005,20(1):127-129.
[2]段鳳陽,常麗敏.某型飛機航姿系統(tǒng)綜合檢查儀的研究與設(shè)計[J].計算機測量與控制,2006,14(5):698-700.
[3]MARLAND P.The NATO ships inertial navigation system(SINS)[J].Journal of Naval Engineering,1992,33(3):688-700.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
