基于CAN總線的分布式船舶火災(zāi)自動監(jiān)控系統(tǒng)
2013-08-10 02:57:50殷文貴
船電技術(shù) 2013年2期
殷文貴
(1. 上海交通大學(xué)電氣學(xué)院,上海200139;2. 中國人民解放軍4805廠,上海200136)
0 引言
船舶火災(zāi)作為一種常見隱患,一旦發(fā)生,勢必造成系統(tǒng)功能故障,若不及時(shí)發(fā)現(xiàn)和控制,事故進(jìn)一步擴(kuò)大,對設(shè)備和人員,都會帶來極大的損失。火災(zāi)的監(jiān)控和預(yù)防,對保證船舶設(shè)備和船員的安全有著重大意義。
CAN總線是一種串行通訊協(xié)議,能有效地支持具有很高安全等級的分布實(shí)時(shí)控制。本文針對船舶常見的火災(zāi)事故隱患,提出一種基于 CAN總線的分布式船舶火災(zāi)自動監(jiān)控系統(tǒng)。系統(tǒng)可以遠(yuǎn)程監(jiān)控火情,可以在火災(zāi)出現(xiàn)時(shí)現(xiàn)場發(fā)出聲光報(bào)警及切斷相關(guān)設(shè)備的電源、啟動排煙裝置、打開噴淋裝置等相關(guān)聯(lián)動操作。
1 系統(tǒng)結(jié)構(gòu)
船舶火災(zāi)自動監(jiān)控系統(tǒng)由火災(zāi)探測傳感器、監(jiān)控系統(tǒng)控制器、現(xiàn)場監(jiān)控單元、聯(lián)動單元、遠(yuǎn)程監(jiān)控單元等組成。
系統(tǒng)地使用基于 CAN 總線的通信網(wǎng)絡(luò),每個火災(zāi)現(xiàn)場檢測單元包含一個 CAN節(jié)點(diǎn),發(fā)生火情時(shí),監(jiān)控系統(tǒng)控制器通過現(xiàn)場的探測器、輸入模塊或者手動報(bào)警按鈕得知火情,并在第一時(shí)間控制報(bào)警裝置發(fā)出聲光報(bào)警,控制現(xiàn)場聯(lián)動裝置。同時(shí),將火災(zāi)信息通過 CAN總線發(fā)送到監(jiān)控中心及遠(yuǎn)程聯(lián)動單元。一方面,可以通知工作人員發(fā)生火情,需采取處理措施;另一方面,消防聯(lián)動控制器控制消防電氣設(shè)備啟動滅火設(shè)施。
一般監(jiān)測報(bào)警系統(tǒng)都存在系統(tǒng)組成比較復(fù)雜、連接電纜較多、末端報(bào)警響應(yīng)慢等缺點(diǎn)[1]。使用 CAN總線的分布式智能化火災(zāi)監(jiān)測系統(tǒng),則避免這些不足。該系統(tǒng)響應(yīng)及時(shí)、易于擴(kuò)展功能和容量。該報(bào)警系統(tǒng)的組成如圖1所示。
2 火災(zāi)探測單元
船舶內(nèi)環(huán)境空間小、設(shè)施復(fù)雜。絕大部分火災(zāi)發(fā)生時(shí)都伴隨一定的發(fā)熱及溫度的升高,可以通過不同的傳感器,同時(shí)采集煙霧、溫度數(shù)據(jù)等火災(zāi)數(shù)據(jù)。
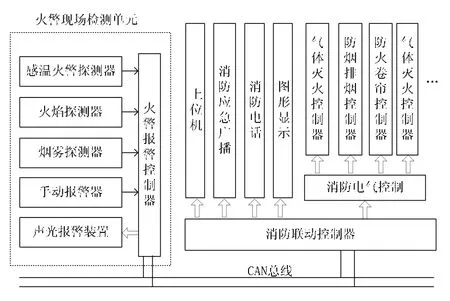
圖1 分布式智能火災(zāi)自動報(bào)警系統(tǒng)示意圖
在預(yù)期有隱燃,將產(chǎn)生大量的煙,很少有火焰的地方,應(yīng)設(shè)有感煙探測器;在預(yù)期火災(zāi)發(fā)展快,有強(qiáng)烈火焰的地方,應(yīng)選擇火焰探測器;在火災(zāi)發(fā)展迅速,可產(chǎn)生大量熱,煙和火焰輻射設(shè)施或場所,可選擇感溫探測器,感煙探測器,火焰探測器或其組合,以達(dá)到最佳的探測效果。
2.1 感溫型探測器的使用
感溫型探測器是利用熱敏元件來探測火情的。根據(jù)其感熱效果和結(jié)構(gòu)型式可分為定溫式,差溫式及差定溫式三種。
定溫探測器用于檢測溫度是否超過了某個設(shè)定值,差溫式探測器用于檢測溫度上升速率是否超過某個規(guī)定值,而差定溫式探測器則結(jié)合了定溫和差溫兩種作用原理并將兩種探測器結(jié)構(gòu)組合在一起。
感溫探測器常用的感應(yīng)傳感器有雙金屬片、易熔金屬、熱電偶熱敏半導(dǎo)體熱敏電阻等原件,其中最常用的是熱敏電阻。熱敏電阻分阻值隨溫度升高而降低的負(fù)溫度系數(shù)(NTC,Negative Temperature Coefficient)熱敏電阻和阻值隨溫度升高而升高的正溫度系數(shù)(PTC, Positive Temperature Coefficient )熱敏電阻,兩種傳感器檢測電路路類似,以 PTC熱敏電阻為例,其阻-溫曲線如圖2所示,在常溫下,它的電阻很小(通常只有幾十歐姆),當(dāng)溫度上升到臨界溫度Tc時(shí),其阻值迅速上升(甚至達(dá)1 M?以上),我們使用圖3 所示的電路即可檢測出這種變化。
在檢測電路中,Rp為熱敏電阻,R2=R3,室溫下,RT﹤R0,此時(shí)光控二級管處于導(dǎo)通狀態(tài),微控制器檢測到低電平。當(dāng)發(fā)生火情時(shí),高溫使得 RT阻值迅速上升,從而遠(yuǎn)大于 R0,因此光控二極管被關(guān)斷,此時(shí)微控制器檢測到高電平[2],從而檢測到火災(zāi)的發(fā)生。
感溫探測器工作比較穩(wěn)定,不易受非火災(zāi)性煙塵霧氣等干擾,誤報(bào)率低,可靠性高。
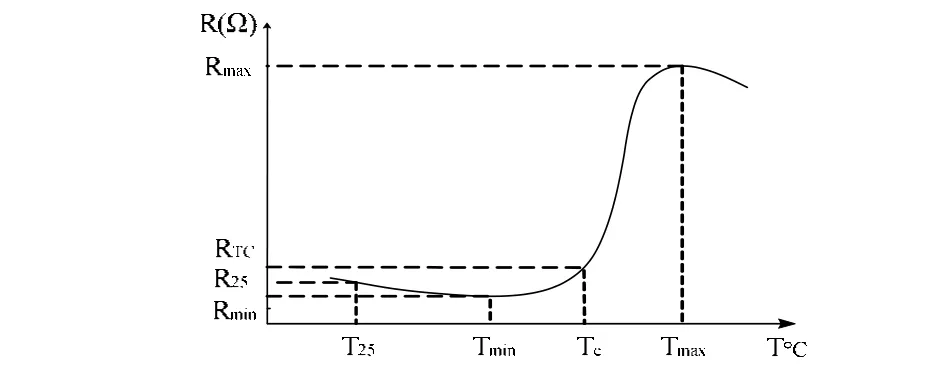
圖2 PTC熱敏電阻的阻-溫曲線

圖3 熱感應(yīng)火災(zāi)檢測電路
2.2 火焰探測器
火焰探測器有紅外火焰探測器和紫外火焰探測器兩種,其檢測譜帶如圖4所示。它由于響應(yīng)速度快,探測范圍廣而獲得廣泛應(yīng)用。紫外光波長較短,比較適宜活潑金屬及金屬氧化物火災(zāi)的探測。而紅外火焰探測器,由于其探測波長較長,較適合含碳類液體火災(zāi)的探測。
火焰探測器使用模塊化的檢測單元,模塊根據(jù)火情輸出0或者1,非常方便微控制器識別和處理。
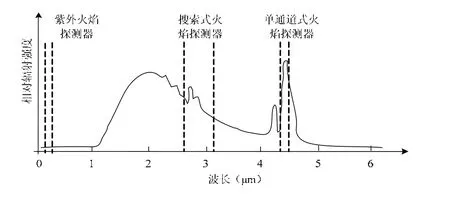
圖4 火焰探測器工作譜帶
2.3 感煙式探測器
煙霧傳感器就是通過監(jiān)測煙霧的濃度來實(shí)現(xiàn)火災(zāi)防范的,常見的煙霧探測器有光電式和離子式,光電式的監(jiān)測原理如圖5所示。探測光源發(fā)出的光在無煙霧和有煙霧的情況下分別被兩個光敏元件接收,光敏元件將光信號轉(zhuǎn)換成電信號后對比判斷即可探測到有無煙霧。
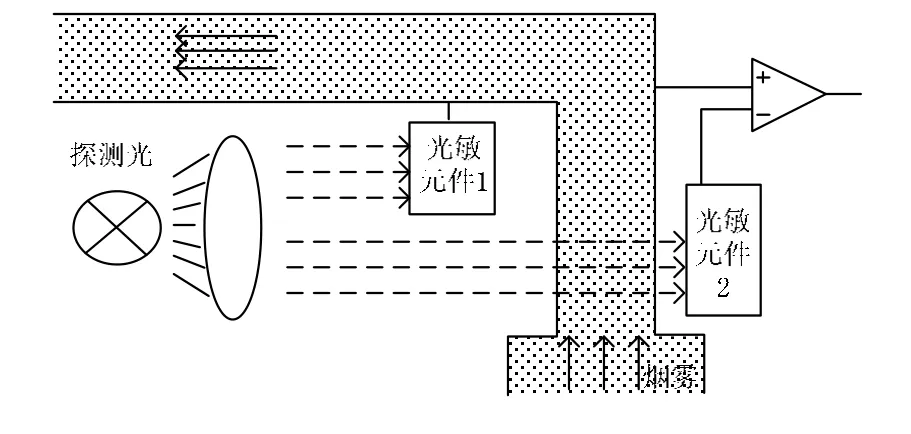
圖5 光電式煙霧探測器原理
離子型探測器的工作原理是:采用離子室來探測煙霧物理量的一種器件,當(dāng)環(huán)境中無煙霧時(shí)即探測器處于值守工作狀態(tài),離子室工作在平衡的離子流的狀態(tài)下,因此其基準(zhǔn)輸出電平保持相對穩(wěn)定,而當(dāng)有煙霧充斥環(huán)境時(shí),離子室中的離子流與煙霧的濃度成正比,所以其基準(zhǔn)輸出電平的電位也發(fā)生了相應(yīng)的變化,那么離子室就將環(huán)境中煙霧濃度的變化轉(zhuǎn)化成輸出電平的變化[3],從而檢測到火警的發(fā)生。
3 現(xiàn)場監(jiān)控單元
3.1 現(xiàn)場監(jiān)控單元硬件
分布式火災(zāi)報(bào)警系統(tǒng)的一個典型特征是現(xiàn)場檢測單元中有微處理器,同時(shí)具有一定的智能,能夠自動報(bào)警,這是當(dāng)今火災(zāi)自動報(bào)警系統(tǒng)的一種發(fā)展趨勢[4]。
現(xiàn)場監(jiān)控單元如圖6所示,控制器使用意法半導(dǎo)體公司的STM32105互聯(lián)型Cortex-M3 處理器,CPU時(shí)鐘達(dá)到72 MHz,它擁有2個CAN接口, 2個I2C,5個UART,3個SPI接口,其豐富的通信接口,使之非常適合用于互聯(lián)設(shè)備的控制器。

圖6 現(xiàn)場監(jiān)控單元
CAN總線收發(fā)器采用SN65HVD230,它是德州儀器公司生產(chǎn)的3.3 V CAN收發(fā)器,該收發(fā)器具有差分收發(fā)能力,最高速率可達(dá)1 Mb/s。適用于較高通訊速率、良好抗干擾能力和高可靠性CAN總線的串行通信。
當(dāng)發(fā)生火災(zāi)時(shí),微控制器接受到來自感溫探測器、火焰探測器、煙霧探測器或者現(xiàn)場人員的手動報(bào)警信息,經(jīng)過判斷后,控制報(bào)警裝置發(fā)出報(bào)警信號,同時(shí)通過控制現(xiàn)場聯(lián)動控制接口,執(zhí)行排煙、噴淋、化學(xué)滅火或斷電等聯(lián)動動作,及時(shí)對火災(zāi)做出第一響應(yīng),將災(zāi)害降低到最小。
微控制器在處理火災(zāi)現(xiàn)場的同時(shí),還將火災(zāi)情況,如溫度,火災(zāi)類型,火災(zāi)地點(diǎn),時(shí)間,聯(lián)動控制信號等數(shù)據(jù),通過 CAN總線及時(shí)發(fā)送到監(jiān)控中心,以通知值班人員采取相應(yīng)的應(yīng)急措施。
3.2 通信網(wǎng)絡(luò)
火災(zāi)監(jiān)控系統(tǒng)是基于 CAN總線構(gòu)建的,通信網(wǎng)絡(luò)也是依照開放系統(tǒng)互連規(guī)范按層次結(jié)構(gòu)設(shè)計(jì)的。考慮到作為工業(yè)測控底層網(wǎng)絡(luò),其信息傳輸量相對較少,信息傳輸?shù)膶?shí)時(shí)性要求較高,網(wǎng)絡(luò)連接方式相對較簡單,因此,CAN協(xié)議定義了ISO/OSI參考模型的物理層及數(shù)據(jù)鏈路層[5]。
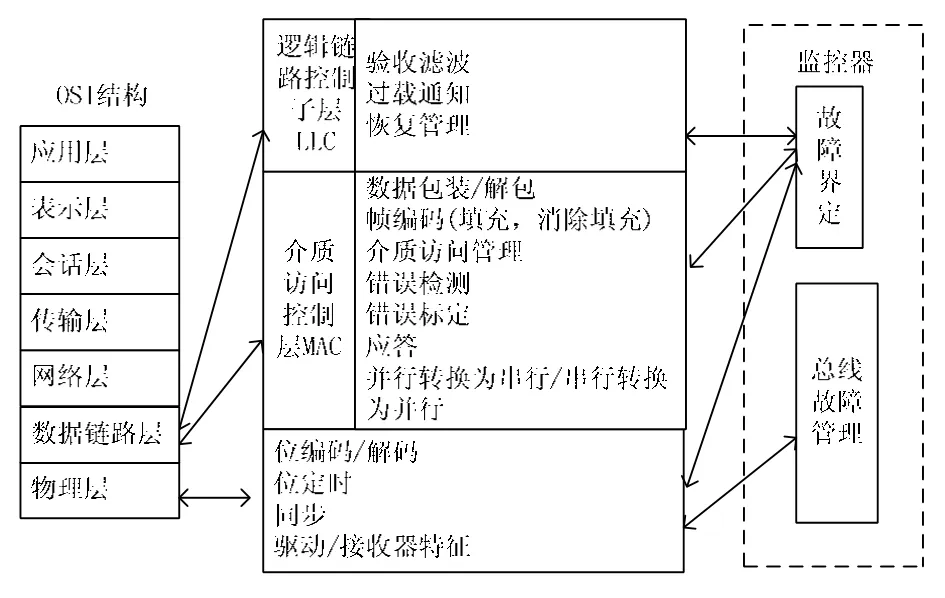
圖7 CAN總線的OSI結(jié)構(gòu)圖
物理層定義了信號是如何實(shí)現(xiàn)傳輸?shù)模婕暗轿欢〞r(shí)、位編碼/解碼、同步的解釋。數(shù)據(jù)鏈層包含介質(zhì)訪問控制子層 MAC(Medium Access Control)和邏輯鏈路控制子層LLC(Logical Link Control)。其中,MAC 子層是 CAN協(xié)議的核心,負(fù)責(zé)報(bào)文分幀、仲裁、應(yīng)答、錯誤檢測和標(biāo)定,把接收到的報(bào)文提供給 LLC 子層,并接受來自LLC 子層的報(bào)文;LLC 子層涉及報(bào)文驗(yàn)收濾波、過載通知和恢復(fù)管理。
CAN收發(fā)器和CAN控制器完成了物理層和數(shù)據(jù)鏈路層的功能,而應(yīng)用層的功能是由 CAN總線的實(shí)際應(yīng)用中由用戶決定的。在本系統(tǒng)中,CAN總線上傳輸?shù)幕馂?zāi)溫度、火災(zāi)類型、火災(zāi)地點(diǎn)、時(shí)間、報(bào)警控制、聯(lián)動操作控制等數(shù)據(jù)構(gòu)成了OSI 7層結(jié)構(gòu)中的應(yīng)用層。
4 軟件設(shè)計(jì)
各個 CAN節(jié)點(diǎn)軟件功能包含現(xiàn)場報(bào)警信息的采集判斷,現(xiàn)場聯(lián)動控制,以及 CAN總線協(xié)議OSI 7層結(jié)構(gòu)中應(yīng)用層的實(shí)現(xiàn)。
STM32105的CAN總線控制器含有2個3 級深度FIFO,CAN報(bào)文的接收使用FIFO來處理,即使接收到的數(shù)據(jù)太多,CPU還未來得及處理,也不會造成CAN報(bào)文的丟失。
CAN節(jié)點(diǎn)使用ID列表過濾方式來實(shí)現(xiàn)數(shù)據(jù)過濾,列表中設(shè)置一個共同的廣播地址和一個CAN節(jié)點(diǎn)地址,每個CAN節(jié)點(diǎn)只處理廣播數(shù)據(jù)以和與自己地址匹配的數(shù)據(jù),跳過大量與自己無關(guān)的數(shù)據(jù)。
STM32的軟件開發(fā)使用ARM公司推出的嵌入式開發(fā)工具M(jìn)DK(Microcontroller Development Kit),它包含了意法半導(dǎo)體(ST)提供的STM32F10x系列處理器片上外圍接口固件庫(Firmware library)[6]。使用這個函數(shù)庫,無需深入處理器的細(xì)節(jié)即可應(yīng)用每一個外設(shè),因而開發(fā)精力可以集中在應(yīng)用軟件功能的實(shí)現(xiàn)上。
上位機(jī)采用Linux操作系統(tǒng),可以獲得遠(yuǎn)高于windows的穩(wěn)定性。監(jiān)控軟件使用C++編程,結(jié)合數(shù)據(jù)庫的使用,完成對火災(zāi)信息的監(jiān)控、顯示、報(bào)警、聯(lián)動控制,記錄等功能。
5 小結(jié)
系統(tǒng)中使用了感溫探測器,火焰探測器和煙霧火警探測器相結(jié)合的探測手段,可以有效監(jiān)測船舶常見類型的火災(zāi),實(shí)現(xiàn)對火災(zāi)的探測。
CAN總線和Cortex-M3處理器的使用,有效地實(shí)現(xiàn)了分布式火警監(jiān)控系統(tǒng)的功能,系統(tǒng)響應(yīng)的準(zhǔn)確性、實(shí)時(shí)性、可靠性都得到了提高,并具有功能和容量易于擴(kuò)展的優(yōu)點(diǎn),具有很好的應(yīng)用前景。
:
[1]王常順,肖海榮,潘為剛. CAN總線的船舶機(jī)艙監(jiān)測報(bào)警系統(tǒng)設(shè)計(jì)[J]. 自動化與儀表, 2010, (10):25-27.
[2]李堯, 佘焱. 水泵電機(jī)綜合保護(hù)裝置的設(shè)計(jì)[J]. 電工技術(shù), 2008, (10): 75-77.
[3]郄建華, 離子感煙探測器電路分析[J]. 太原師范學(xué)院學(xué)報(bào)(自然科學(xué)版). 2008, 4(7): 98-101.
[4]馮勇. 感煙感溫復(fù)合探測器[D]. 合肥工業(yè)大學(xué),2006.
[5]饒運(yùn)濤, 鄒繼軍. 現(xiàn)場總線 CAN原理與應(yīng)用[M].北京: 北京航空航天大學(xué)出版社, 2003.
[6]李寧. 基于 MDK的 STM32處理器開發(fā)應(yīng)用 [M].北京: 北京航空航天大學(xué)出版社, 2008.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34