一種新型MEMS 加速度傳感器的研制*
2013-08-09 08:08:40楊要恩孫幸成王慶敏
電子器件 2013年2期
楊要恩 ,孫幸成,王慶敏,3
(1.石家莊鐵路職業技術學院機電系,石家莊 050041;2.石家莊鐵道大學,石家莊 050043;3.北京交通大學機械與電子控制工程學院,北京 100044)
在現代工業測控領域,結構感知技術已經較初期有了很大的發展,不同原理、不同類型、不同測試結構的各種各樣的傳感器得到了廣泛應用。而隨著技術的不斷發展,工業測控領域對傳感器的采集精度、動態響應、抗干擾能力、可靠性、質量、成本及頻帶等都提出了更高的要求。但是,目前工業測控領域所使用的傳感器尤其是在大型結構長期實時振動測試所用的加速度傳感器方面,多采用慣性式位移傳感器及配套的放大器進行結構振動加速度測試,其存在抗擾動能力差、易老化、可靠性差、動態響應慢、成本較高等缺點[1-3],容易造成測試數據的失真,很難滿足目前工業測控領域對結構參數進行長期、實時、在線自動感知的要求,以及對傳感器成本低、耗電量小、質量輕、體積小等的節能減排的要求[4-5]。
為了滿足結構對測試的要求,研發出一種基于MEMS 微機械加工技術(Micro-Electro-Mechanical Systems)的無線加速度傳感器,并對其傳感特性進行了研究。
1 無線加速度傳感器的整體設計方案
相對于現有的分布式采集-有線數據傳輸-中央數據處理的傳統結構振動測試架構,基于無線加速度傳感器技術的分布式采集-無線數據傳輸-分布式處理的新一代結構振動測試架構系統采用模塊化方法進行集成設計,具有測試精度高、穩定性好及實時性強的優點[6-7]。其主要由加速度信號檢測模塊、微控制器模塊、無線收發模塊和電源模塊構成,如圖1所示。其工作過程如下:微控制器模塊通過無線收發模塊接收遠程監控中心下達的數據采集指令,控制加速度信號檢測模塊啟動或停止對外部振動激勵的采集,接收加速度信號檢測模塊所檢測到的外部振動激勵信號,并進行壓縮、濾波、打包處理,最終經無線收發模塊將處理好的加速度信號傳輸至遠程監控中心。電源模塊分別為加速度信號檢測模塊、微控制器模塊、無線收發模塊提供電能,其供電方式為3.3 V 可充電鋰電池供電,同時設計了外接電源供電接口,在條件允許的情況下采用外接電源供電,可以延長電池的使用壽命。

圖1 無線加速度傳感器的整體設計方案
1.1 加速度信號檢測原理及外圍電路設計
綜合考慮結構的低頻振動特性及傳感器芯片的測試精度、頻率測試范圍、占空比等因素,采用VTI公司的一款基于3D-MEMS(微機械加工系統)電容傳感器技術的高精度、低功耗、低成本的單軸加速度傳感器芯片SCA830-D06,其主要是由一個高精度微機電加速度傳感元件和一個靈活的SPI 數字接口組成,工作電壓范圍為+3.0V~+3.6V,帶寬范圍為50 Hz,工作溫度范圍為-40℃-+125℃,最大功耗為20 mW,測量結果以數字SPI 形式輸出。
微控制器模塊采用TI 公司的超低功耗的混合信號控制器MSP430F249,MSP430F249 能夠在低電壓下以超低功耗狀態工作,具有強大的處理能力和豐富的片內外設置。片內有3個基礎時鐘模塊,靈活的時鐘選擇使得控制器可在最合理的時種下進行工作,大大降低了芯片的功耗。MSP430F249 具有豐富的外圍接口,包括標準串口、SPI 接口、I2C 接口等,方便連接多種設備。
如圖2所示為加速度信號檢測電路原理圖,微控制器與加速度傳感器芯片之間的數據通訊方式為SPI 方式,其中微控制器MSP430F249 作為主設備,加速度芯片SCA830-D06 作為從設備。微控制器接收到所發布的啟動命令后將啟動本次振動采集,結構產生振動時,加速度傳感器芯片將所檢測到的加速度信號通過其內部集成的濾波電路、采樣保持電路、AD 轉換電路等進行處理,轉換為相應的數字量信號,微控制器模塊通過SPI 接口將加速度數字量接收至MSP430F249 的數據存儲器中,MSP430F249完成對加速度數字量的數字濾波、頻譜分析、特征值分析、數據壓縮等工作,并對數據按照ZigBee 協議格式進行打包。

圖2 加速度芯片與微處理器芯片連接電路圖
1.2 無線數據收發電路設計
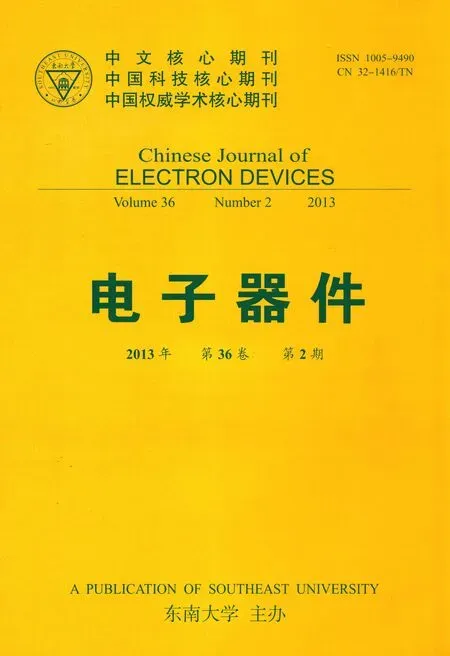
無線收發模塊采用TI 下屬Chipcon 公司生產的CC2430 芯片,它是一種符合ZigBee 技術的2.4GHz射頻系統單芯片,此單芯片上整合了ZigBee 射頻(RF)前端、內存和微控制器。它采用高性能和低功耗的8051 微控制器核;集成符合IEEES02.15.4 標準的2.4 GHz 的RF 無線電收發機;具有優良的無線接收靈敏度和強大的抗干擾性;在休眠模式時僅0.9μA 的流耗,外部的中斷或RTC 能喚醒系統,在待機模式時少于0.6μA 的流耗,外部的中斷能喚醒系統;適應較寬的電壓范圍(2.0 V~3.6 V);集成AES 安全協處理器。圖3所示為微控制器模塊與無線收發模塊的連接原理圖。
CC2430 與微控制器MSP430F249 之間同樣采用SPI 通信接口方式,其中MSP430F249 作為主設備,CC2430 作為從設備。圖3 中,CC2430 的引腳11、12、13、14、15 分別與MSP430F249 的引腳P4.4、P4.3、P4.2、P4.1、P4.0 相連,表示收發數據的狀態。C15、C16為22 pF 的電容,連接32 MHz 的晶振電路,此石英晶體用于正常工作使用。C10、C11為15 pF 的電容,連接32.768 kHz 的晶振電路,用于休眠時工作,以降低功耗。C17為0.1μF 與6.8 kΩ 的電阻R10 相連后連接至RESET 端,防止單片機錯誤復位。C13、C14、C18、C19 分別為220 nF、10 nF、100 nF、220 nF 用作濾波,去除雜波干擾使電壓更穩定。
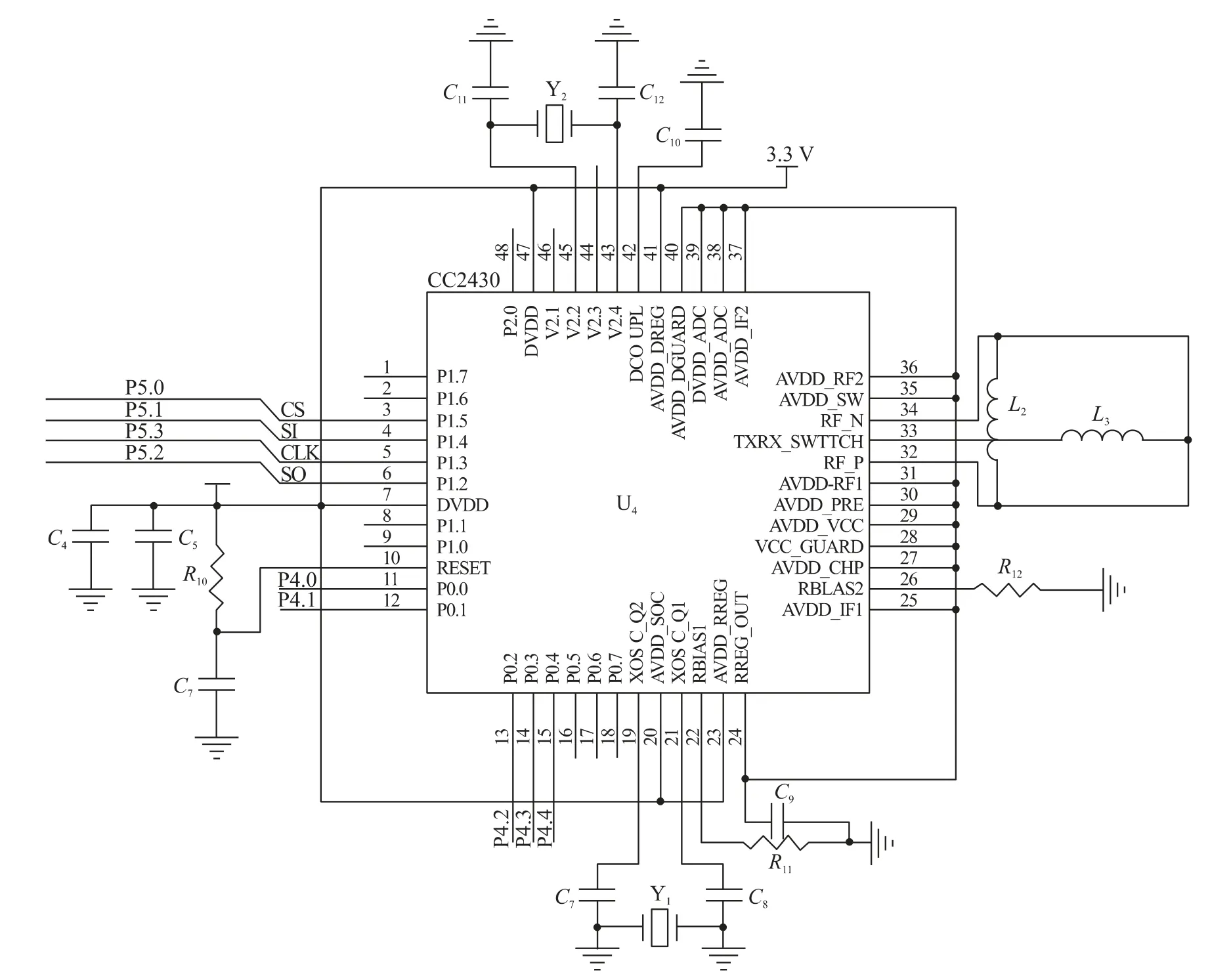
圖3 微控制器與無線收發模塊電路連接
無線數據收發電路的工作過程如下:微控制器將打包后的數據通過SPI 通信接口傳輸至無線收發模塊,無線收發模塊收到數據后選擇最優無線發送路徑將數據包傳輸至相鄰傳感器。此外,無線收發模塊自動檢測其他傳感器節點所發送過來的數據轉發請求,當無線收發模塊處于空閑狀態時,可接收其他傳感器所發送過來的數據并進行轉發,從而延長通訊距離。當傳感器處于空閑狀態時,整個傳感器將處于休眠狀態,以降低待機功耗,延長工作時間。
現場所有傳感器節點所采集的數據通過各自的最優路徑最終匯集在現場主控節點,各傳感器數據可通過各自不同的身份ID 號加以識別。主控節點可與Internet 網互聯,進而將所有振動數據遠程傳輸至數據中心,對各傳感器數據進行詳細分析處理。
1.3 軟件實現
在硬件電路完成之后,必須通過編寫軟件程序才能使得該無線傳感器正常工作。軟件程序要能夠完成對各個模塊進行初始化、控制器的啟動運行和數據處理功能以及數據的無線收發等功能。本研究采用C 語言作為編程語言。為了降低功耗、節約電池供電能量、延長工作時間,沒有外部觸發時,系統處于休眠狀態,需要工作時,發出喚醒命令,重新進入工作狀態。
2 傳感器動態傳感特性實驗與分析
實驗研究MEMS 加速度傳感器的動態特性,對無線MEMS 傳感技術在結構振動實時監測中的可行性和可靠性進行進一步的驗證。實驗用的MEMS傳感器即為本研究第1 部分設計的傳感器,并對設計好的傳感器進行封裝考核。實驗裝置主要由DF1010 寧波中策電子有限公司超低頻信號發生器、XS 型振動臺伺服控制系統、振動實驗臺、筆記本電腦等組成。將無線MEMS 傳感器和標準有線加速度(型號891-4)傳感器用環氧樹脂(EPOXY)粘貼于振動實驗臺(帶激振器)上下表面對應位置處,并將標準有線加速度傳感器(型號891-4)的輸出作為標準加速度,利用超低信號發生器產生低頻正弦信號,在振動臺伺服控制系統下,測試振動臺在不同頻率(低頻振動測試頻率范圍為0.1 Hz~40 Hz)激振下傳感器的動態響應。
2.1 動態響應線性度分析
線性度是表征傳感器輸出-輸入校準曲線與所選定的擬合直線之間的吻合(或偏離)程度的指標。顯然,選定的擬合直線不同,計算得到的線性度數值也就不同。選擇擬合直線的原則應保證獲得盡量小的非線性誤差[8],選用最小二乘法原理來求取擬合直線可保證傳感器校準數據的殘差平方和最小。
線性度可通過輸出電壓和輸入加速度響應的關系曲線分析,如圖4所示。在圖中加速度的輸入選擇了從0~3 gn的測試范圍,由分析可知,傳感器的線性擬合度為0.999 7,也即傳感器的輸出電壓與加速度成正比。
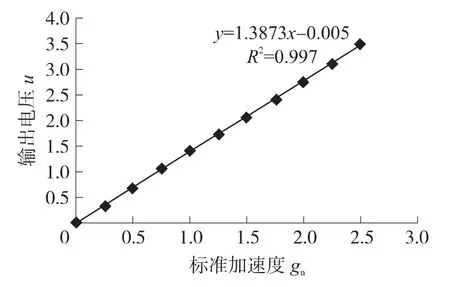
圖4 輸出電壓與標準加速度之間的關系
2.2 動態響應實時特性分析
主要考察將MEMS 傳感器與標準電阻加速度傳感器粘貼到基體材料后,其動態特性與標準加速度傳感器的一致性。所采用的實驗儀器和設備與2.1 相同,測試結果如圖5、圖6所示。
圖5 MEMS 傳感器動態響應圖
通過多次測量可以發現,所研發的加速度傳感器與所選的標準傳感器數據吻合的很好,二者在相同條件下的動態響應特性具有很好的一致性,可以用于結構的低頻振動的動態實時測試。

圖6 標準加速度傳感器動態響應圖
3 結論
為了克服傳統機械類傳感器測試精度不高及長期穩定性差的不足,本研究采用MEMES 技術制成的加速度芯片設計并研發了一種新型加速度傳感器,對構成傳感器的外圍電路進行了設計。并對所設計研發的傳感器設計實驗對其動態特向進行考核,實驗結果表明:所研發的傳感器具有良好的動態特性,具有良好的線性度及長期的重復穩定性,適于結構的長期實時監測。該傳感器可以批量化生產、價格低、穩定性好、動態響應快。
[1]梁山,胡穎,王可之,等.基于無線傳感器網絡的山體滑坡預警系統設計[J].傳感技術學報,2010,23(8):1184-1188.
[2]毛堯輝,苑偉政,虞益挺.基于MEMS 技術的無線加速度測量系統[J].微納電子技術,2006,5:254-257.
[3]王慶敏,蘇木標,劉玉紅,等.MEMS 加速度傳感器在橋梁橫向動位移監測中的應用[J].儀器儀表學報,2007,28(4):345-348.
[4]Wang Qingmin,Yang Yaoen,Su Mubiao.Research on Application of Micro-Nano Acceleration Sensor in Monitoring the Vibration State of Vehicles[J].Procedia Engineering,2012,29(1):1213-1217.
[5]王慶敏,楊要恩,蘇木標,等.MEMS 微電容式傳感器的傳感特性研究[J].傳感技術學報,2009,22(10):1396-1400.
[6]楊要恩,王慶敏,孫寶臣,等.F-P 光纖傳感器的溫度與應變傳感特性研究[J].傳感器技術,2005,24(4):24-28.
[7]王少華,李宏偉,歐進萍.基于MEMS 的微電容式無線加速度傳感器的研究[J].傳感器與微系統,2007,26(6):94-96.
[8]Geiger W,Butt W U,Gaisser A.Decoupled Microgyro and the Design Principle DAVED[J].Sensor and Actuators,2002,A95:239-249.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00