基于VAPID的道路清障車扶正控制研究
2013-07-25 03:34:50呂成緒張為公
中國機械工程 2013年10期
關鍵詞:模型
呂成緒 張為公 李 旭
1.東南大學,南京,210018 2.南京農業大學,南京,210031
0 引言
道路清障車是交通事故救援的主要裝備。扶正作為道路清障車的主要功能,是影響道路交通事故救援效率的關鍵因素。目前國內對道路清障車的研究主要集中在結構設計方面[1-7]。與道路清障車扶正系統類似的汽車起重機起升系統的研究,主要面向其伸縮臂控制及二次起升問題[8-10],而針對扶正控制的研究成果較少。
國內道路清障車主要配備雙卷揚[11-12],國外多為四到六個卷揚。清障救援作業時,由清障救援人員手動控制、協調各卷揚位移,實現事故車輛扶正[13-16]。扶正過程中,具體操作因清障救援人員經驗而異,缺乏規范,自動化程度低,嚴重影響救援效率。采用雙卷揚扶正時,捆扎復雜,且不能保證扶正過程的穩定性,容易引發二次事故。
為了順應工程機械自動化、智能化的發展趨勢[17],提高救援效率,本文對道路清障車的自動扶正控制進行了研究。根據事故車輛與道路清障車的幾何位置關系,建立了扶正控制模型,獲得了控制對象的變化規律,并分別利用常規PID控制算法和變參數PID(VAPID)控制算法,對該模型進行了仿真研究。
1 扶正過程建模
為簡化模型,將事故車輛以長方體剛體代替,不考慮側向位移,將扶正過程簡化為定軸轉動。模型采用四卷揚(主副卷揚各2個)。為保證扶正過程平穩,以扶正過程中事故車輛姿態為控制對象,研究扶正過程中各卷揚之間的位移關系。建立圖1所示的扶正模型。圖1中,AB為事故車輛高度;BC為事故車輛寬度;CD為事故車輛長度;AJ為事故車輛前懸長度;JK為事故車輛軸距;KF為事故車輛后懸長度;P、Q為道路清障車吊臂上主副卷揚固定滑輪位置;K、J、L、M為事故車輛輪胎鋼圈位置;AOEF為事故車輛底盤。
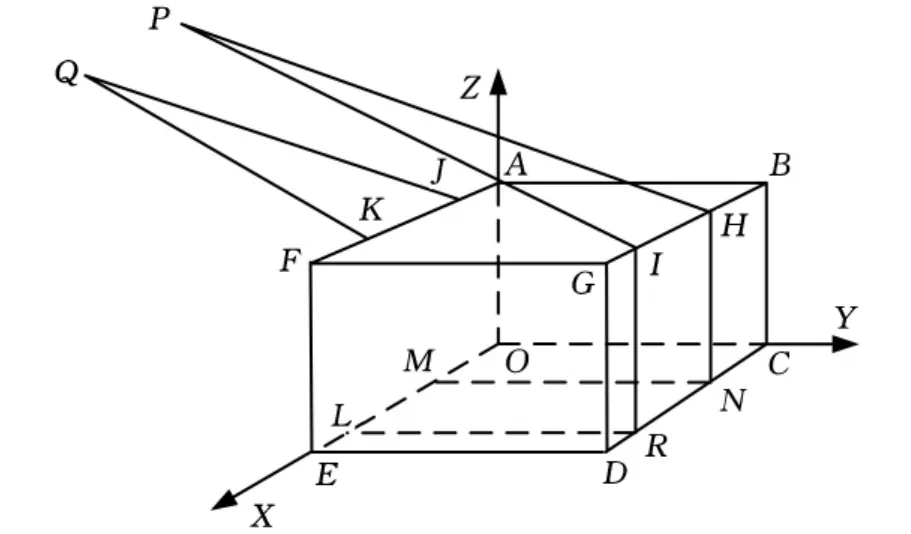
圖1 扶正模型
扶正時以4個輪胎鋼圈作為捆扎固定位置。捆扎時,要求MN∥LR∥AB,NH∥RI∥OA,繩索PHM和PIL分別連接2個主卷揚,QK、QJ連接2個副卷揚。扶正過程中,設卷揚到吊鉤的距離及LI、MH等長度保持不變,只有PH、PI、QK、QJ隨事故車輛翻轉角度而變化。
圖2所示為扶正模型在YOZ平面的投影。設AB=a,BC=b,CD=c,AJ=d,AK=e,P點坐標為(x1,y1,z1),Q點坐標為(x2,y2,z2)。根據幾何關系,可得
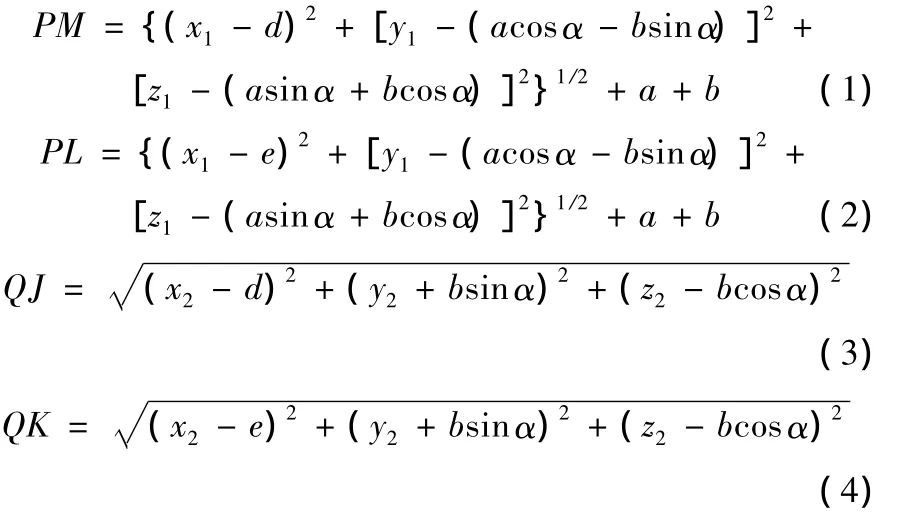
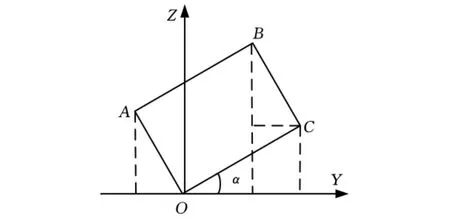
圖2 扶正模型在YOZ平面投影圖
扶正過程應安全平穩,避免二次事故,因此控制策略以事故車輛姿態平穩為首要考慮。假設事故車輛以角速度ω勻速扶正,即α=ωt。一旦確定ω及事故車輛特征參數、清障救援車輛與事故車輛的相對位置,根據上述公式即可求得扶正過程各卷揚位移變化曲線。
以一般的家用轎車為例,設事故車輛長寬高為4.8m、1.8m、1.4m,車輛前懸長度為 0.9m,后懸長度為1.2m,軸距為2.7m,即a=1.4m,b=1.8m,c=4.8m,d=0.9m,e=0.9+2.7=3.6m。道路清障車主副卷揚固定滑輪坐標為P(2m,-3m,4m)、Q(2m,-3.5m,3m),角速度ω=10°/min。將上述參數代入式(1)~式(4),可分別求得4個卷揚的位移曲線,如圖3所示。
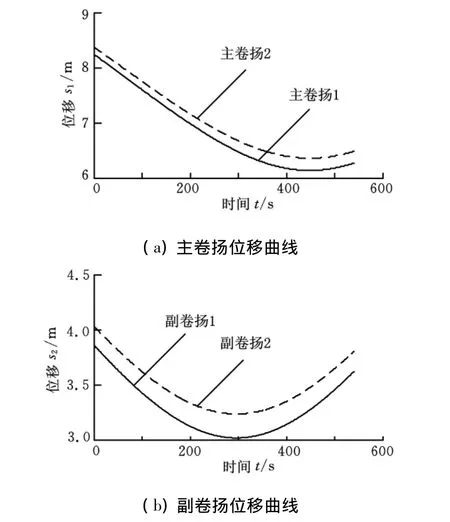
圖3 卷揚位移曲線
扶正過程中,該位移曲線的變化量即為各卷揚收放繩索的長度,負值表示繩索收緊,正值表示卷揚放繩。因為扶正過程比較緩慢,以60s為間隔進行計算,將t+60時刻位移與t時刻位移相減,即可得到各卷揚工作時,位移隨時間的變化曲線,如圖4所示。
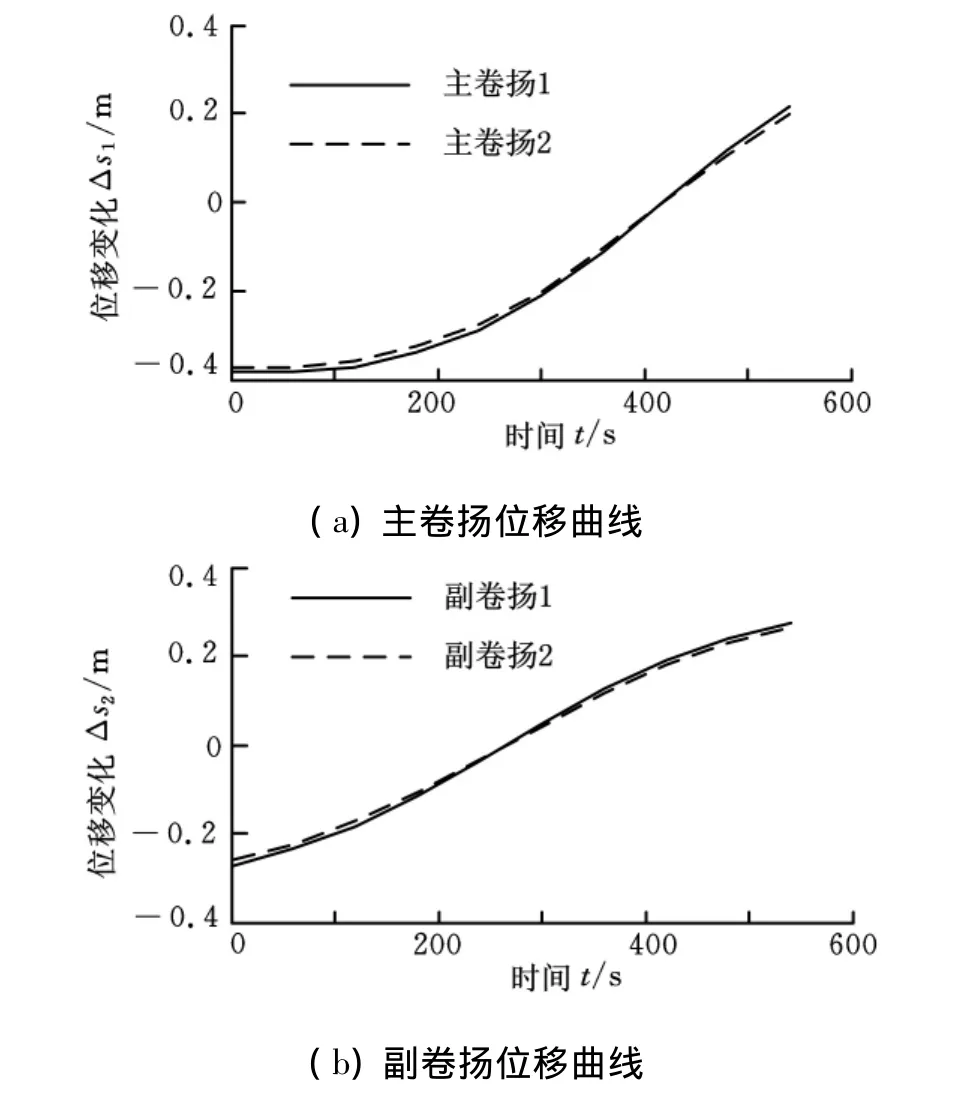
圖4 卷揚位移變化曲線
2 液壓回路AMESim建模
在AMESim環境下,根據道路清障車的實際起升回路[18],建立其扶正系統電液伺服模型,單個卷揚液壓回路模型如圖5所示。模型主要參數設定見表1。
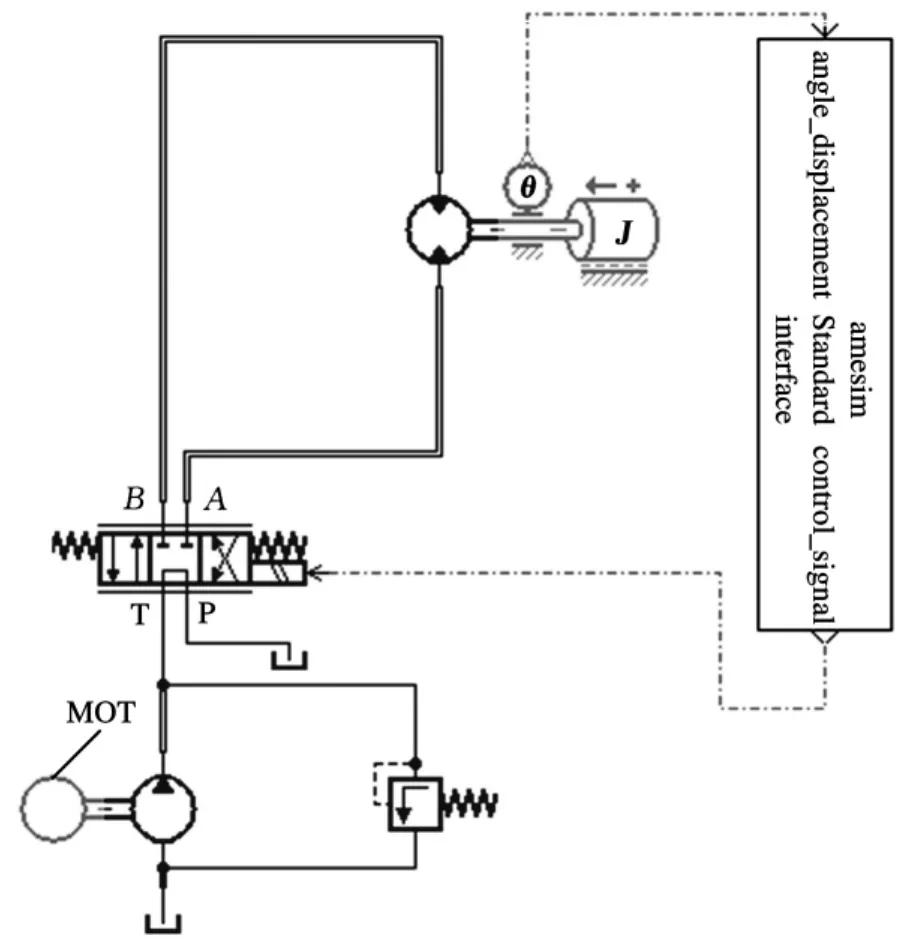
圖5 基于AMESim的道路清障車扶正系統仿真模型
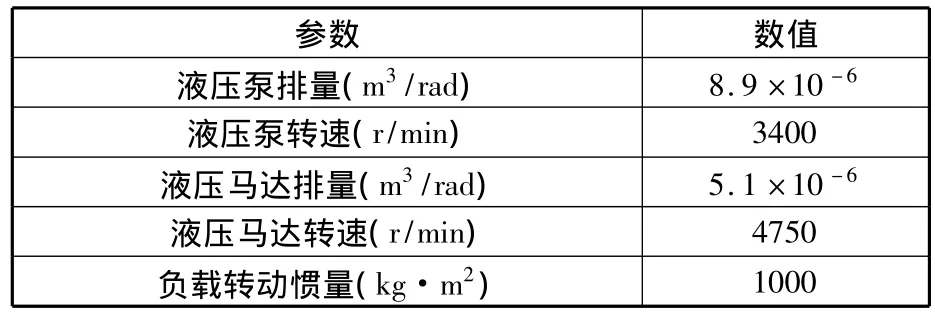
表1 重要液壓元件參數
3 AMESim與MATLAB聯合仿真
工程實踐中,經常采用常規PID控制。常規PID控制中,Kp、Ki、Kd根據對象模型或動態響應曲線進行整定[19]。變參數PID控制器將Kp、Ki、Kd取為偏差E的函數。根據偏差E的大小,實時改變這3個系數,加快對小偏差的反應,提高控制器對干擾的靈敏度,出現干擾時及時調節[20]。
VAPID控制算法的參數調整公式如下:
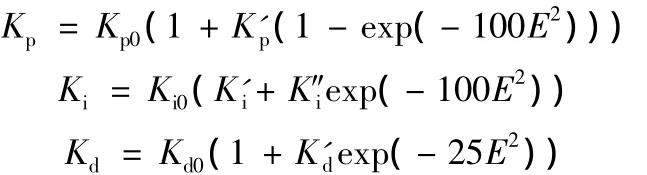
通過設置環境變量等,MATLAB可以實現與AMESim 的聯合仿真[21]。在 MATLAB/Simulink環境中,分別搭建常規PID與VAPID控制系統。系統 Simulink模塊見圖 6、圖 7,其中,AMESim Model模塊為AMESim中經過系統編譯、參數設置等生成供Simulink使用的S函數。圖7中封裝的VAPID模塊內部組成如圖8所示。
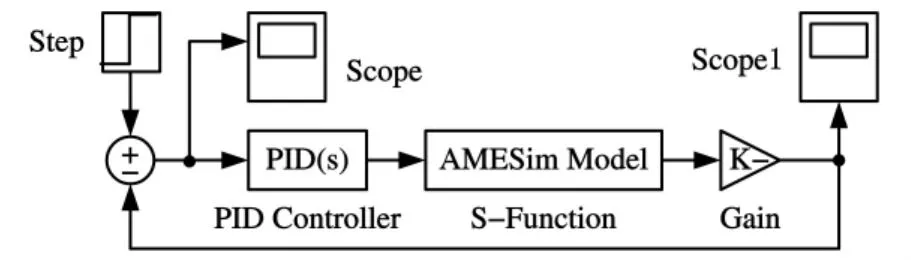
圖6 常規PID控制系統Sim ulink模塊圖
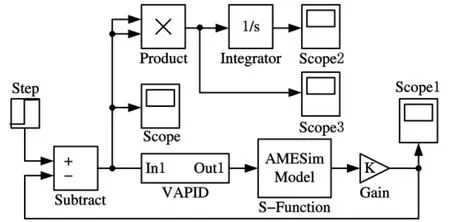
圖7 VAPID控制系統Sim ulink模塊圖
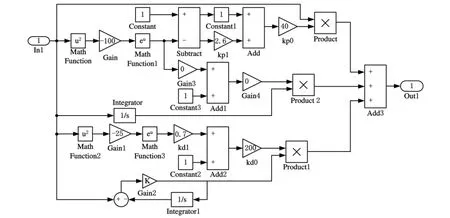
圖8 VAPID Sim ulink模塊圖
常規PID與VAPID階躍響應曲線如圖9所示。將輸入信號由階躍信號改為4個卷揚實際位移變化曲線,仿真得到的跟蹤誤差見圖10。
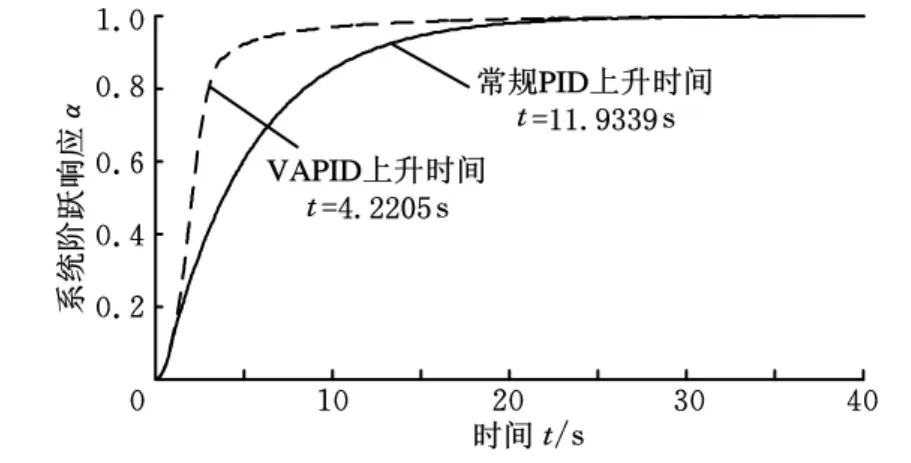
圖9 階躍響應曲線
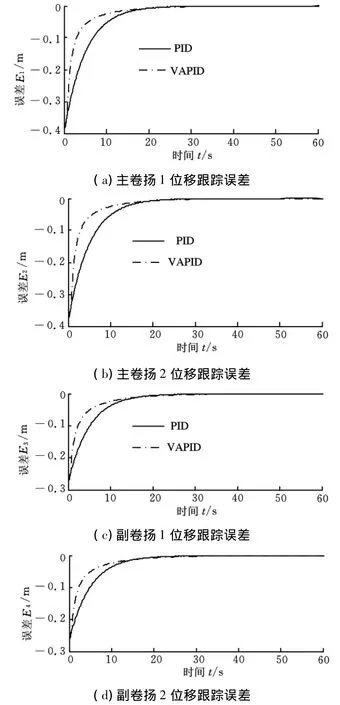
圖10 位移跟蹤誤差

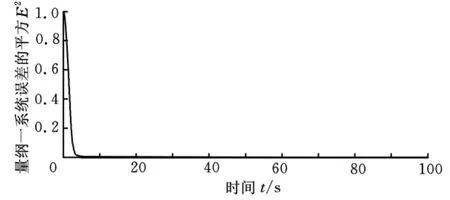
圖11 系統誤差E2(t)曲線
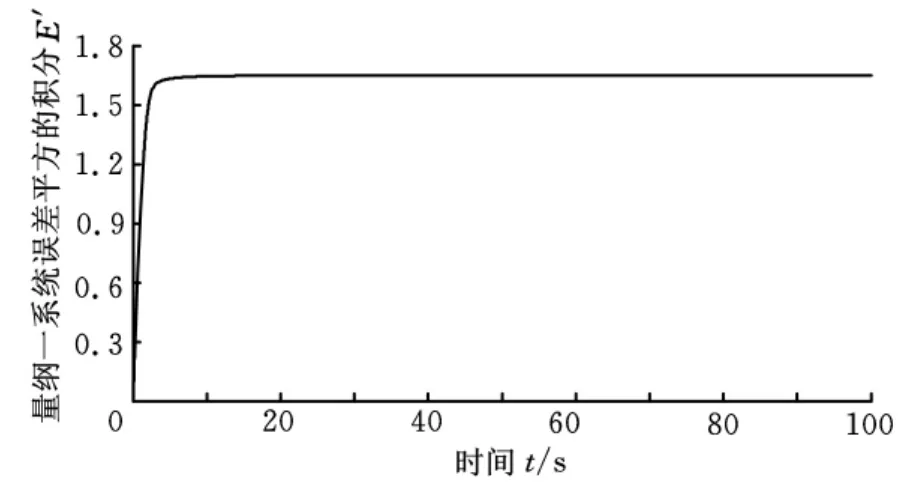
圖12 系統誤差E2(t)的積分
由階躍響應曲線及跟蹤誤差曲線可知:
(1)從仿真結果來看,常規PID也可以實現系統的穩定,但是利用VAPID控制,不僅能保證系統穩定,而且能使系統的階躍響應更快,到達穩態的時間更短,基本無超調。
(2)在跟蹤道路清障車各卷揚位移時,VAPID控制的系統跟蹤誤差比常規PID控制的系統跟蹤誤差衰減更快,且系統誤差無回調現象,可以實現事故車輛的平穩扶正。
(3)在仿真過程中,VAPID控制比常規PID控制增加了3個參數,但設置并不復雜,能夠使得控制效果提升明顯。
4 結論
(1)建立了道路清障車扶正模型。通過扶正模型,只需確定事故車輛前懸長度、后懸長度、軸距及清障救援車作業位置等參數,即可獲得控制對象的變化規律。(2)利用AMESim軟件建立了道路清障車扶正系統的液壓回路模型,分別采用VAPID與常規 PID算法進行了扶正控制,在MATLAB/Simulink環境中進行了仿真分析。仿真結果表明,VAPID相對于常規PID控制算法,在跟蹤各卷揚實際位移時,誤差衰減更快,且基本無超調現象出現,可以實現事故車輛的自動平穩快速扶正。研究結果為增強道路清障救援行業自動化水平、提高救援效率奠定了理論研究基礎。(3)在實際情況中,車輛外形各式各樣,事故對車輛外形的影響也不盡相同,本文將車輛側翻后理想化為長方體剛體只是其中較為典型的事故形態。對于其他如混凝土車等車輛的扶正,需要根據實際情況進行建模和理論分析。
[1]張占國.重型清障車吊臂和托架強度剛度的有限元分析研究[D].長春:吉林大學,2005.
[2]張占國,周金來.重型清障車吊臂結構模態有限元分析[J].工程機械,2007,38(12):34-39.
Zhang Zhanguo,Zhou Jinlai.Finite Element Analysis in Boom Structural Mode of Heavy Barrier-clearing Vehicle[J].Construction Machinery and Equipment,2007,38(12):34-39.
[3]張占國,于畔光.拖吊分離型清障車拖架有限元模態分析[J].北華大學學報(自然科學版),2010,11(5):449-452.
Zhang Zhanguo,Yu Panguang.Finite Element Modal Analysis for Bracket of the Bracing-hoisting Separated Barrier- clearing Vehicle[J].Journal of Beihua University(Natural Science),2010,11(5):449-452.
[4]王書賢.汽車交通事故模式分析與救援車輛的研究開發[D].武漢:武漢理工大學,2007.
[5]樂韻斐,施俊俊,王臨春.可折疊式道路清障車的機構設計及優化[J].現代制造工程,2010(3):115-118.
Le Yunfei,Shi Junjun,Wang Linchun.Mechanism Design and Optimization of the Road FoldableWrecker[J].Modern Manufacturing Engineering,2010(3):115-118.
[6]湯辛華.清障車:一種經濟實用的操縱機構[J].商用汽車,2008(1):102-103.
Tang Xinhua.Introduction of Several Operating Methods of Hydraulic Pressure Systems of Wrecker[J].Commercial Vehicle,2008(1):102-103.
[7]湯辛華.道路清障車感應式隨動托舉裝置[J].專用汽車,2006(5):13-14.
Tang Xinhua.Induced Servo Lift- up Equipment of Wrecker[J].Special Purpose Vehicle,2006(5):13-14.
[8]于睿坤,李萬莉,周奇才.工程起重機伸縮臂控制回路動態模型與仿真[J].中國機械工程,2006,17(23):2457-2460.
Yu Ruikun,LiWanli,Zhou Qicai.Dynamic Model and Simulation of Crane Telescopic Boom Control Circuit[J].China Mechanical Engineering,2006,17(23):2457-2460.
[9]王宜華.現代大型液壓起重機起升性能研究[D].大連:大連理工大學,2006.
[10]安振偉.中小型液壓起重機起升系統仿真研究[D].長春:吉林大學,2008.
[11]張啟君.清障車市場情況及發展簡析[J].商用汽車,2007(1):85-87.
Zhang Qijun.Analysis of the Road- block Removal Truck Market and Its Development[J].Commercial Vehicle,2007(1):85-87.
[12]李忠生.國內清障車的技術現狀及發展趨勢[J].商用汽車,2003(11):50-51.
Li Zhongsheng.Domestic Technical Status and Developing Trend of Wrecker[J].Commercial Vehicle,2003(11):50-51.
[13]寧文祥.國外清障車救援實例展示[J].專用汽車,2010(3):35-36.
Ning Wenxiang.Foreign Wrecker Rescue Examples Show[J].Special Purpose Vehilce,2010(3):35-36.
[14]Olsen R.Teamwork Can Save Lives[J].On Call 24/7,2008,4(1):12.
[15]Luciano T.A Steep Challenge[J].On Call 24/7,2008,4(2):21-23.
[16]Luciano T.Different Conditions May Require You to“Think Out of the Box”[J].On Call 24/7,2008,4(3):6-8.
[17]王慶豐,魏建華,吳根茂,等.工程機械液壓控制技術的研究進展與展望[J].機械工程學報,2003,39(12):51-56.
Wang Qingfeng,Wei Jianhua,Wu Maogen,et al.Progress and Prospects in the Research of Hydraulic Control for Construction Machinery[J].Chinese Journal of Mechanical Engineering,2003,39(12):51-56.
[18]沈全興.液壓傳動與控制[M].北京:國防工業出版社,2010.
[19]Rovira A A,Murrill P W,Smith C L.Tuning Controllers for Set- point Changes[J].Instruments and Control Systems,1969,42(12):67-76.
[20]鐘慶昌,謝劍英,李輝.變參數PID控制器[J].信息與控制,1999(8):273-277.
Zhong Qingchang,Xie Jianying,Li Hui. PID Controller with Variable Arguments[J].Information and Control,1998(8):273-277.
[21]陳娟娟.基于AMESim的靜液傳動車輛驅動系統控制及仿真[D].哈爾濱:哈爾濱工業大學,2010.
[22]Slotine J- JE,LiWeiping.Applied Nonlinear Control[M].Upper Saddle River,New Jersey,USA:Prentice Hall,1991.
[23]閔穎穎,劉允剛.Barbalat引理及其在系統穩定性分析中的應用[J].山東大學學報(工學版),2007,37(1):51-55.
Min Yingying,Liu Yungang.Barbalat Lemma and Its Application in Analysis of System Stability[J].Journal of Shandong University (Engineering Science),2007,37(1):51-55.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
