北斗系統高軌衛星高精度定位模型病態性分析及改進方法
2013-07-25 05:17:26王勝利聶文鋒潘樹國
導航定位學報 2013年3期
王勝利,王 慶,聶文鋒,潘樹國
(1.東南大學 儀器科學與工程學院,南京 210096;2.東南大學 交通學院,南京 210096;3.安徽理工大學 測繪學院,安徽 淮南 232001)
1 引言
北斗衛星導航系統 (BeiDou navigation satellite system,BDS)是全球衛星導航系統 (global navigation satellite system,GNSS)的重要組成部分[1]。BDS的導航星座主要由中圓地球軌道(medium earth orbits,MEO)衛星、地球靜止軌道 (geostationary earth orbits,GEO)衛星及傾斜地 球 同 步 軌 道 (inclined geo-synchronous orbits,IGSO)衛星組成[2],其中高軌道衛星GEO/IGSO運行軌跡變化相對緩慢,GEO/IGSO衛星相對接收機運動的角速度變化并不顯著,由此導致的模糊度解算觀測方程的病態性是BDS高精度定位模型的核心問題。
準確和快速確定模糊度固定值有兩個前提:一是要有較準確的模糊度浮點解,二是要有較好的模糊度搜索方法[3-4]。模糊度解算的處理流程是首先進行最小二乘 (least square,LS)估計模糊度浮點解,然后結合各種搜索模糊度的方法來確定整周模糊度,其中最具影響力的搜索方法有最小二 乘 降 相 關 分 解 法[5-6](least-square ambiguity decorrelation adjustment,LAMBDA)和最小二乘 模 糊 度 搜 索 法[7-8](least-squares ambiguity search technique,LSAST)等。對于準確快速確定模糊度浮點解,文獻[3]利用雙差模型的法方程有三個特征值接近于零,其他特征值遠大于它們的特征,提出了基于奇異值分解的Tikhonov正則化解法,結果表明在分米級基線偏差時解算模糊度成功率較高,但是不適合于基線偏差較大的情況。文獻[4]針對這個問題,提出了利用基線先驗精度信息實時估計正則化參數的正則化算法,結果表明結合其提出的模糊度線性約束條件可提高模糊度解算效率和正確率。文獻[9]則進一步利用文獻[3]中特征值的特征,構造了雙k嶺估計的方法對模糊度浮點解精度進行了改善。但是這些算法一是針對以軌道運行速度較快的中軌道MEO衛星為基礎的全球定位系統 (global positioning system,GPS)及格洛納斯衛星導航系統 (global navigation satellite system,GLONASS),而BDS主要由高軌道衛星組成,GEO/IGSO衛星平均運行角速度僅為MEO衛星的2%及60%左右,因此運行特征存在一定差別,二是與常規基線處理中模糊度解算不同,在網絡實時動態 (real time kinematic,RTK)基線處理中,基線偏差很小,先驗精度比較高,高精度定位模型也存在一定的區別。
本文通過對GPS中軌MEO衛星,BDS高軌GEO/IGSO衛星角速度的比較,詳細分析了BDS高精度定位模型中出現病態性問題的原因。針對這種問題,通過對兩個天頂對流層參數加以約束,提出了基于部分嶺估計的模糊度浮點解快速解算的改進方法。實驗算例的結果表明,在利用GEO/IGSO衛星快速高精度定位時,該方法能夠提高模糊度浮點解的精度,進而縮小LAMBDA算法的搜索空間,提高模糊度固定解的合格基線方差比 (即Ratio)值。因此,本文探討的是制約BDS高精度定位的本質問題和改進方法,是進一步研究BDS與其他GNSS技術融合高精度定位的基礎,具有理論意義和實際應用價值。
2 GEO/IGSO載波相位雙差定位模型
在網絡RTK長基線處理中,采用的載波相位雙差觀測值能夠消除接收機鐘差和衛星鐘差。當距離較長時,由于對流層延遲很難用模型較好消除,所以引入天頂對流層參數進行估計。而對于電離層延遲,可以采用電離層無關的線性組合來削弱影響。
假設基站p,q觀測共視衛星有n+1顆,并且選擇參考衛星編號為k,單歷元載波雙差網絡RTK L1模糊度解算誤差方程可表示為
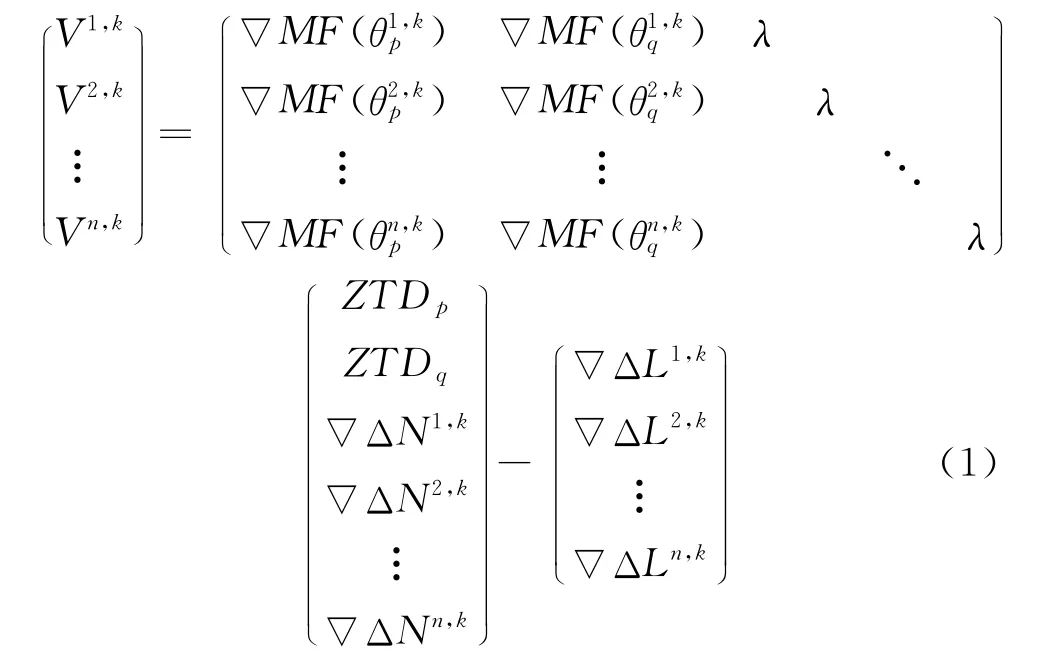
式中
▽(·)為單差算子,▽Δ(·)為雙差算子,MF(·)為 映 射 函 數,▽MF)=MF)-MF),ZTD為測站的天頂對流層濕延遲,λ、N分別表示L1載波波長和模糊度,λW、λN分別表示寬巷波長和窄巷波長,φIF、φ1、φ2、ρ、NW分別表示無電離層組合觀測值、L1相位觀測值、L2相位觀測值、衛地距、寬巷模糊度、▽ΔTD為雙差對流層延遲干分量,可以用模型估計,f1、f2分別為L1載波頻率和L2載波頻率。
式 (1)為一個歷元的誤差方程,可簡寫為

因此,對于單個歷元,共視衛星n+1顆,可列n個誤差方程,而存在2個映射函數參數,以及n個雙差模糊度參數,共n+2個未知參數,無法用單歷元求解。所以需要多歷元解算,解算方法可以使用序貫最小二乘。
3 GEO/IGSO雙差模糊度模型病態性分析
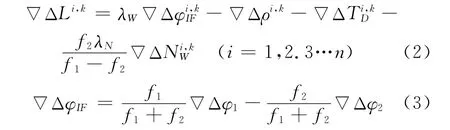
設兩基站連續觀測m個歷元,共視n+1顆衛星,在較短的時間內天頂對流層延遲變化不大,因此假設對流層不變。總的誤差方程可以表示為
可寫成

式中,A為s×2維,C為s×n(s=m×n)維系數矩陣,TZTD為2×1,▽ΔN為n×1維待估參數向量,L為s維雙差觀測值向量,V為s維殘差向量。
在最小二乘準則下,由式 (6)組成法方程,得到無偏待估參數的解為


在主要由IGSO和GEO衛星組成BDS中,由于GEO/IGSO衛星屬于高軌衛星,軌道高,運行速度慢,特別是GEO衛星,運行軌跡變化相對緩慢,運行角速度變化并不顯著,如圖2及圖3所示。一方面由于衛星結構變化緩慢,另一方面,又由于對流層延遲變化不明顯,導致當法方程行列式的絕對值很小時,一旦Naa,W有較小擾動,就會使得參數解有較大擾動,即導致觀測方程出現病態性問題。
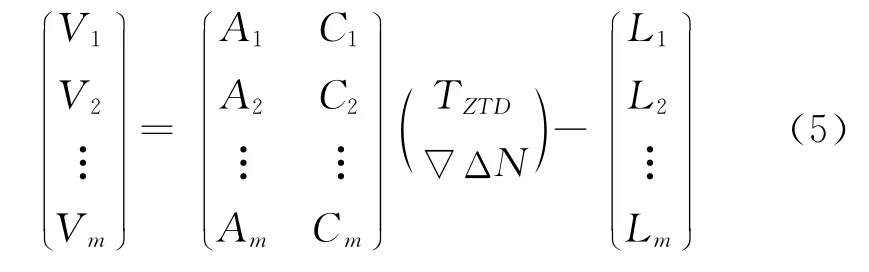
圖1 GPS運行角速度
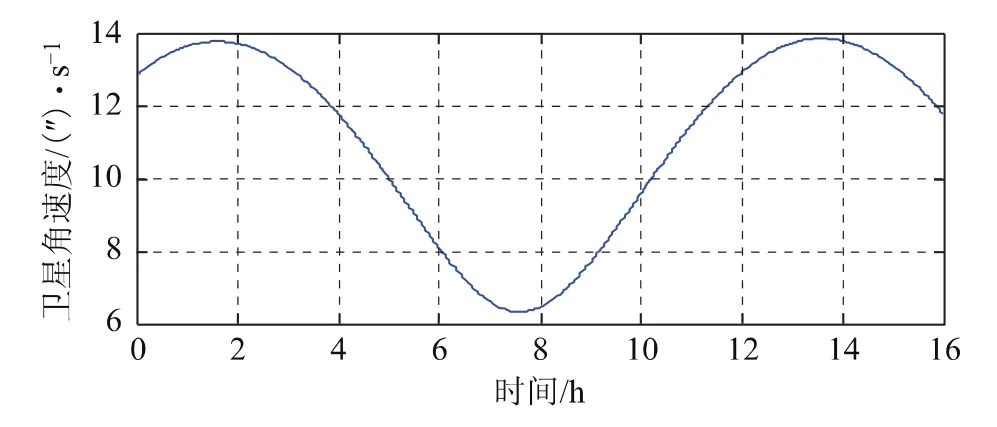
圖2 IGSO運行角速度
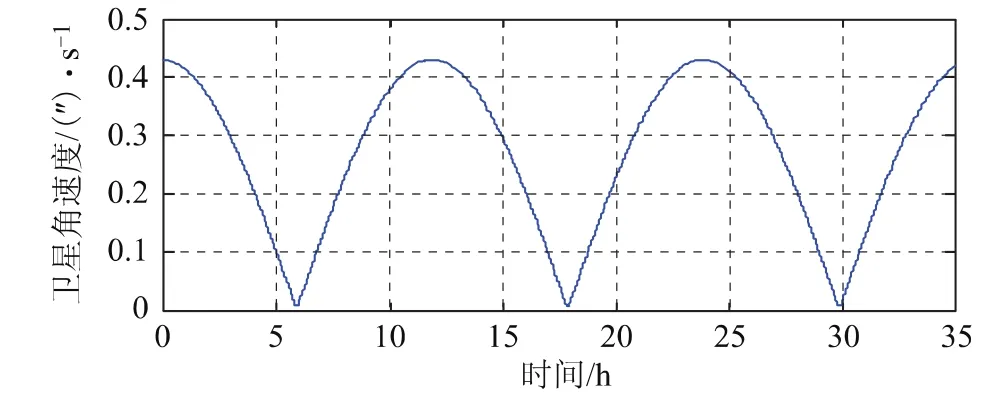
圖3 GEO運行角速度
圖1表示的是GPS G01號衛星角速度從2012年6月27日0點至24點的變化情況,圖2是IGSO C06號衛星角速度從2012年7月19日9點至7月20日1點變化情況,圖3是GEO C05號衛星角速度從2012年7月19日9點至7月20日20點的變化情況。
從圖1、圖2及圖3可以看出,MEO G01衛星的角速度最大,IGSO C06衛星次之,GEO C05號衛星最小,與實際情況相符。
模型的病態性可由法方程的條件數來表示。條件數是病態性的一種度量指標。文獻 [10]給出了一個經驗數量標準,即0<cond(N)<100,認為沒有病態性;100≤cond(N)≤1000,認為存在有中等程度或較強的病態性;cond(N)>1000,則有較嚴重的病態性 (cond(N)表示方程N的條件數)。本文采用法方程的條件數來衡量定位模型的病態性。
實驗通過數據模擬的方式,分析GPS和GEO/IGSO定位的病態性問題。以東南大學禮西樓頂點 (32.058°N,118.789°E)為參考站 A,以距離A站5km的倍數,方位角沿東方向每隔5km取點,構造出B點的坐標。分析基站距離由5-200 km,觀測時間由5-30min的基站模糊度解算中單GPS和單BDS的結構及區別,如下圖所示 (由于條件數值比較大,采用了條件數的自然對數)。
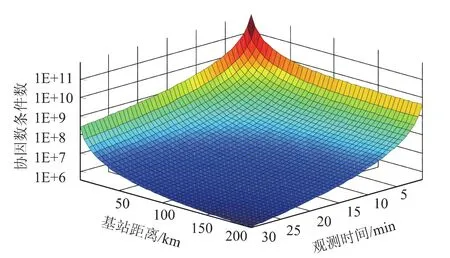
圖4 GPS條件數
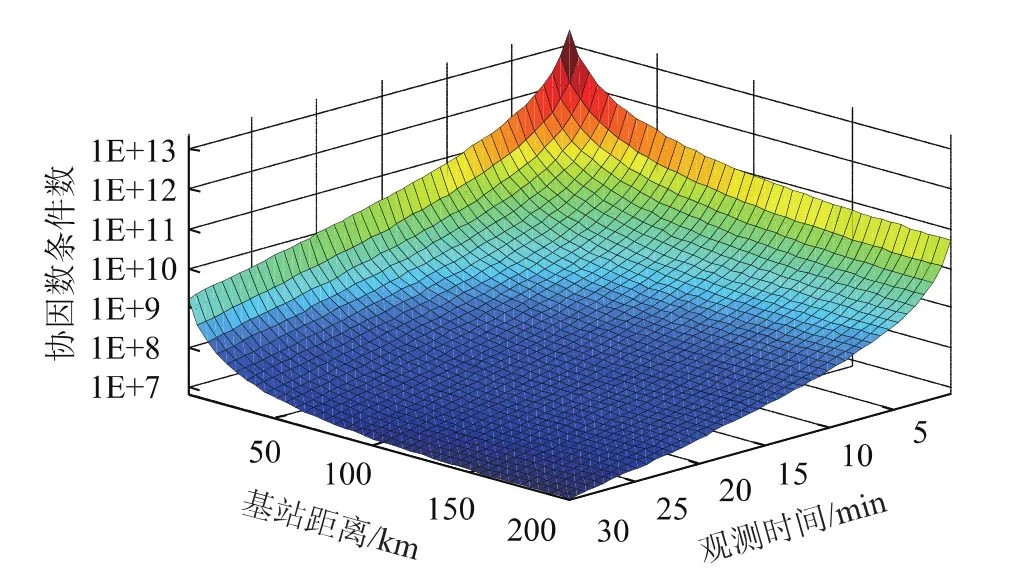
圖5 BDS條件數
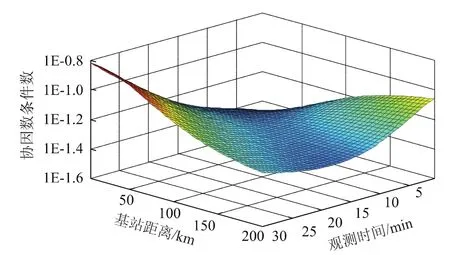
圖6 BDS-GPS條件數
從圖4、圖5及圖6中可以看出,隨著基站間距離的增加和觀測時間的延長,GPS和BDS條件數都降低。這是由于基站間距離增加,兩個基站天頂對流層延遲相關性減弱,病態性降低。又由于觀測時間越長,衛星空間幾何結構變化越明顯,病態性也降低。同時可以看出,載波雙差解算中,BDS的法方程條件數相應要大于GPS的條件數,且隨著距離的增加和時間的延長,兩者的差異性越來越大。由此也反映了BDS中GEO/IGSO衛星運行速度慢,衛星結構變化緩慢,病態性較GPS MEO衛星嚴重的特點。如果不進行改進,應用序貫最小二乘求解時,模糊度浮點解的精度很低,與準確值相差較大,嚴重影響網絡RTK的初始化時間以及導航定位的精度和效率。
4 基于部分嶺估計的病態性改進方法及實驗驗證
載波雙差定位模型

在實際的平差問題中,法方程系數陣的行列式不應為零,但它的絕對值可能很小,條件數很大,使得參數解很不穩定。
嶺估計是從減小均方差的角度出發而提出的一種有偏估計方法[11-12],部分嶺估計是基于嶺估計思想的一種新的有偏估計方法[4]。文獻 [13]給出了均方差意義下有偏估計解由優于傳統最小二乘的條件。未知參數的部分嶺估計解為
由式 (11)可知,部分嶺估計是在最小二乘估計的法方程系數陣Naa的主對角線對流層項上加上一個常數k,從而改變法方程系數陣的態性。
為了驗證本文中針對GEO/IGSO衛星高精度定位病態性問題提出的基于部分嶺估計的模糊度浮點解快速解算方法,進行了大量的實驗。通過選取不同的嶺參數k值,計算對應的Ratio值來衡量模糊度解算的準確程度。
實例1中,基線長度20km,采樣率5s,高度截止角為10°,觀測時間從1min到5min,觀測到6顆衛星,分別為C01,C03,C04,C06,C07,C08,參考衛星為C08。k值的選取從0到1,分別計算對應的Ratio值,如圖7所示。
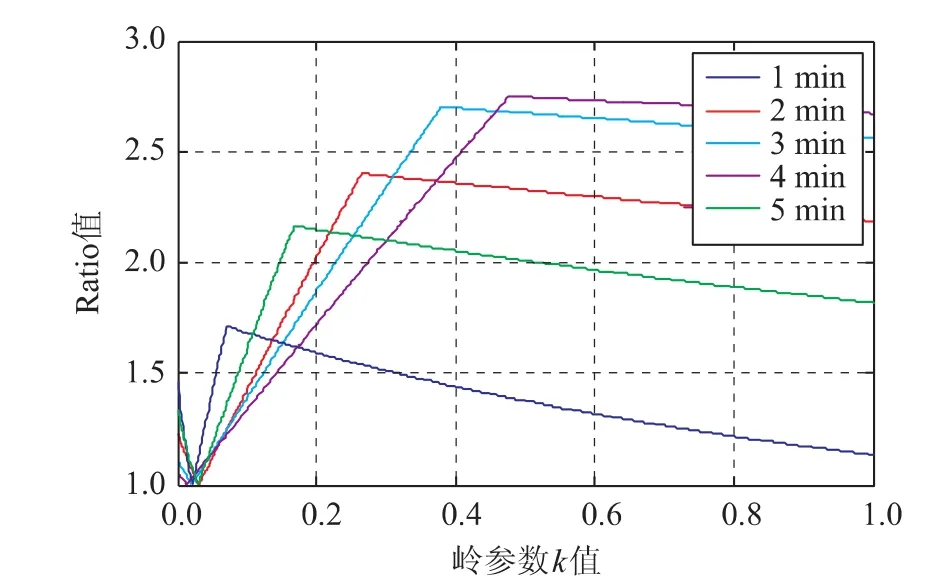
圖7 不同觀測時間不同k值的模糊度解算情況
實例2中,基線長度20km,采樣率5s,高度截止角為10°,觀測時間從1min到5min,觀測到6顆衛星,分別為C01,C03,C04,C06,C08,C09,參考衛星為C06。k值的選取從0到1,分別計算對應的Ratio值,如圖8所示。
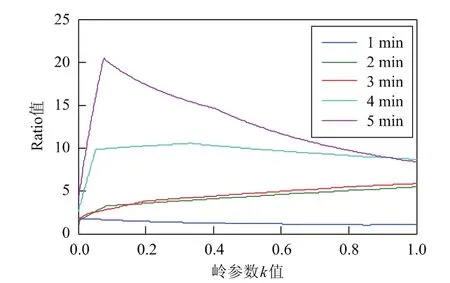
圖8 不同觀測時間不同k值的模糊度解算情況
從圖7及圖8可以看出,隨著觀測時間的增加,Ratio值逐漸變大,并且不同的觀測時間對應某一具體的嶺參數k值,使得Ratio值達到最大。由此可以看出,本文提出的部分嶺估計方法確實改善了模型的病態性,提高模糊度浮點解的精度,縮小了模糊度浮點解的搜索空間,進而提高模糊度固定的準確率。在此基礎上采用LAMBDA算法可快速準確的固定整周模糊度,減小網絡RTK的初始化時間,提高導航定位的精度和效率。
5 結論
本文針對BDS中GEO/IGSO衛星高精度定位模型中病態性問題,通過對兩個天頂對流層參數加以約束,提出基于部分嶺估計的模糊度浮點解快速解算方法,改善了模型的病態性,提高了模糊度浮點解的精度。實際算例的結果驗證了該算法的正確性。但是對于不同長度不同觀測時間的基線,如何選取嶺參數k值使得Ratio值達到最大,最大程度提高模糊度浮點解的精度是今后進一步研究的內容。
[1]楊元喜.北斗導航衛星系統的進展,貢獻與挑戰[J].測繪學報,2010(2),39(1):1-6.
[2]RAN Cheng-qi.Development of BeiDou Ravigation Satellite System[C]//National Academy of Engineering.Global Navigation Satellite Systems:Report of a Joint Worksho Pof the National Academy of Engineering and the Chinese Academy of Engineering.Washington,D.C.:The National Academies Press,2012:17-24.
[3]OU J,WANG Z.An Improved Regularization Method to Resolve Integer Ambiguity in Rapid Positioning Using Single Frequency GPS Receivers[J].China Science Bulletin,2004,49(2):196-200.
[4]李博峰,沈云中.顧及基線先驗信息的GPS模糊度快速解算[J].測繪學報,2008,37(4):423-427.
[5]TEUNISSEN P J G.The GPS Integer Least-squares Statistics[J].Physics and Chemistry of the Earth,Part A:Solid Earth and Geodesy,2000,25(9-11):673-677.
[6]TEUNISSEN P J G.A Canonical Theory for Short GPS Baselines.Part I:The Baseline Precision[J].Journal of Geodesy,1997,71(6):320-336.
[7]HATCH R R.Instantaneous Ambiguity Resolution[C]//SCHWARZ K P,LACHAPELLE G.Kinematic Systems in Geodesy,Surveying,and Remote Sensing:Symposium No.107Banff,Alberta,Canada,September 10-13, 1990.New York:Springer, 1990:299-308.
[8]HATCH R R.Ambiguity Resolution while Movingexperimental Results.Proceedings of ION GPS-91,4th International Technical Meeting of Satellite Division of the Institute of Navigation, Albuquerque, New Mexico,September 11-13,1991[C].New Mexico:The Institute of Navigation,Inc.,1990:707-713.
[9]歸慶明,韓松輝,吳炳榮,等.雙k型嶺估計及其在GPS快速定位中的應用[J].測繪科學技術學報,2006,23(1):8-10.
[10]陳希孺,王松桂.回歸分析-原理方法及應用[M].合肥:安徽教育出版社,1987.
[11]歐吉坤.測量平差中不適定問題解的統一表達與選權擬合法[J].測繪學報,2004,33(4):283-288.
[12]田玉淼,朱建軍,陶肖靜.修正嶺估計方法在測量數據處理中的應用研究[J].測繪工程,2012,21(1):7-10.
[13]徐天河,楊元喜.均方誤差意義下正則化解優于最小二乘解的條件[J].武漢大學學報:信息科學版,2004,29(3):223-226.
