一種組合導航的直接法濾波算法
2013-07-25 07:49:40趙建新
導航定位學報 2013年3期
關鍵詞:系統
聞 新,紀 龍,趙建新
(南京航空航天大學 航天學院,南京 210016)
1 引言
組合導航系統以慣性導航系統 (inertial navigation system,INS)輔助全球定位系統 (global positioning system,GPS)接收機增強系統抗干擾能力,保證組合后的導航精度高于各系統單獨工作的精度[1-2]。組合系統直接法濾波的系統狀態方程為非線性方程[2],這給濾波器設計帶來一定困難。針對該問題,部分學者在工作點處作線性化后采用擴展卡爾曼濾波 (extended Kalman filter,EKF)進行狀態估計,但當INS精度較低或載體處于高動態環境時,EKF算法參數估計精度不高甚至會發生濾波發散;另有學者在假設系統噪聲為白噪聲前提下,采用無跡卡爾曼濾波 (unscented Kalman particle filter,UPF)直接對非線性系統方程進行濾波估計,但這一方法僅在系統噪聲為白噪聲時成立。
粒子濾波 (particle filter,PF)在處理非線性、非高斯系統的參數估計問題上具有獨特優勢,對組合導航這類復雜問題的求解可獲得較高精度[3-5]。本文提出了基于 UPF的INS/GPS組合導航系統直接法濾波狀態估計,以INS的導航參數及平臺誤差角作為系統狀態,慣導力學編排方程和姿態誤差方程作為狀態方程,GPS的輸出作為觀測值,采用UPF直接進行組合導航系統參數解算。基于這一方案的系統狀態方程包含9個參數,減少了陀螺儀及加速度計漂移等狀態變量,降低了狀態變量維數易于粒子濾波實現。
2 INS/GPS組合導航系統濾波結構
本文INS/GPS組合導航系統基于閉環組合方式采用直接法濾波,INS和GPS分別對載體運動參數進行測量,將INS和GPS測得的參數分別送入UKF濾波器進行集中解算,從而獲得系統狀態的最優估計并作為組合導航系統的輸出,濾波輸出對INS系統進行狀態反饋修正。這種組合系統還能夠實現GPS信號無效時的容錯性,其結構如圖1所示。
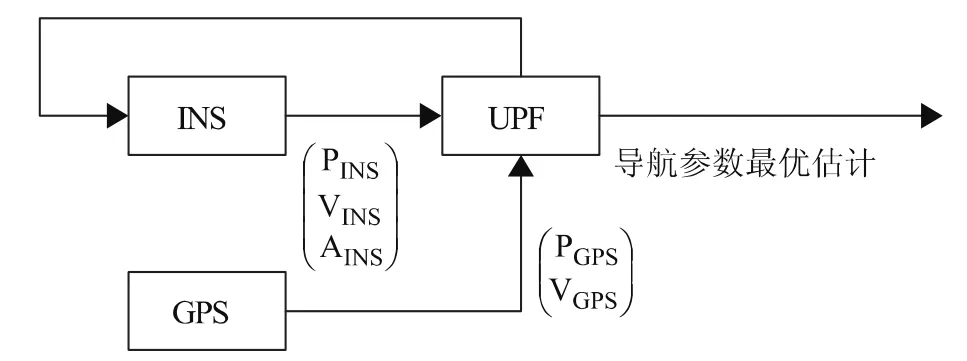
圖1 INS/GPS組合導航系統的直接法UPF濾波結構圖
3 基于UPF的INS/GPS組合導航系統直接法濾波算法
導航坐標系選為東北天地理坐標系,則慣導系統的力學編排方程和姿態誤差方程如式 (1)和式 (2)所示。

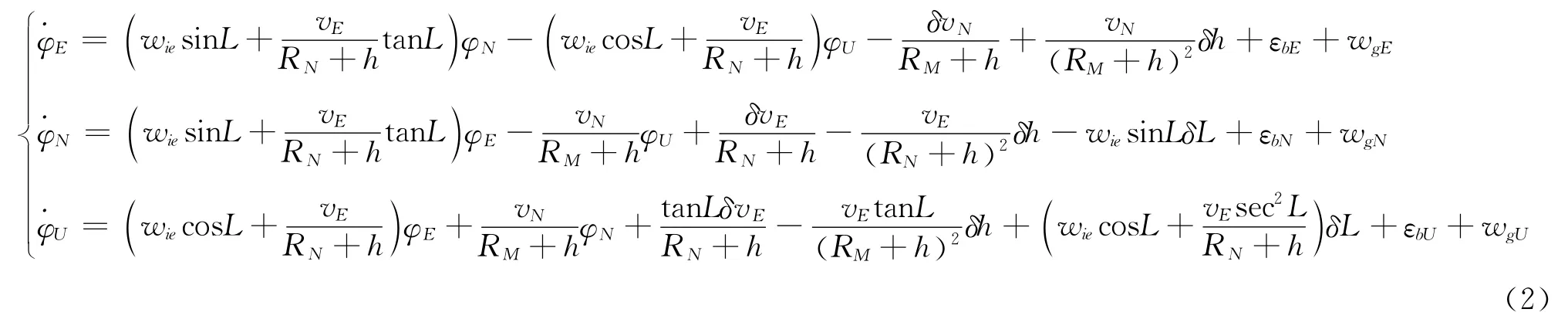
式中,vE、vN、vU為東、北、天向速度,L、λ、h為經度、緯度和高度,φE、φN和φU為東、北、天向姿態誤差角,系統以這9個參數作為狀態值。其中,fE、fU、fN為加速度計輸出的東北天向比力觀測值,δvE、δvN、δh和δL在實際計算中可以由INS和GPS的輸出差值近似獲得,εbE、εbN和εbU為陀螺的東、北、天向常值漂移。
3.1 系統狀態方程
為簡化系統模型并提高濾波計算效率,本文僅對東、北、天向位置、速度和姿態誤差建模,不對加速度計和陀螺進行誤差建模,則INS/GPS組合導航系統狀態向量為

根據選取的系統狀態向量x,結合式 (1)、式(2)和式 (3),可列寫出INS/GPS組合導航系統的狀態方程為

式 中,f[·]為 非 線 性 連 續 函 數,W(t)=[wgE,wgN,wgU]T為系統噪聲。
3.2 觀測方程
以GPS輸出的速度信息vEGPS、vNGPS、vUGPS和位置信息LGPS、λGPS、hGPS為觀測值Z,即

據前面所選取的系統狀態x和觀測值Z,可獲得組合導航系統的觀測方程

式中,Zk和xk為Z和x在k時刻的值,H(·)為線性函數,Vk= [VVE,VVN,VVU,VL,Vλ,Vh]T為觀測噪聲,強度為Rk。
3.3 UPF濾波算法解算過程
基于個人計算機的解算過程要采用離散的系統方程,而INS/GPS組合導航系統狀態方程為微分方程。因此,需要對式 (4)進行離散化。離散化后的系統狀態方程

式中,F(·)為非線性離散函數,Wk為系統噪聲,噪聲方差強度為Qk。其中
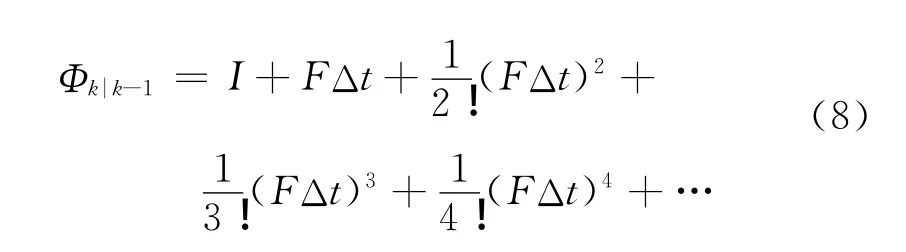
為減小系統離散化誤差,仿真過程中取前三項以減小離散化誤差。并且有
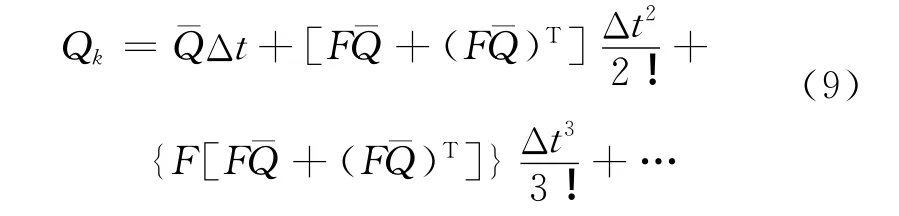
式中,Δt為濾波更新周期,=Q。狀態方程和觀測噪聲如下
利用上面推導出的INS/GPS組合導航系統離散方程,結合UKF濾波法的遞推更新過程,得出基于UPF算法的組合導航系統濾波過程如下
1)初始化:k=0
其中,=x(t)t=k。
2)重要性密度函數,k=1,2,…,T,使用UKF更新粒子
其中na=nx+nw+nv為擴展后系統狀態的維數,且,通過該式對狀態向量進行擴展。
(2)對每個采樣點,i=1,2,…,N,應用UKF算法得到,,從而得到簡易分布函數

(3)從建議分布中抽取粒子:

(4)計算粒子權值并歸一化

3)重采樣
對 {,} ,i=1,2,…,N重采樣,得到新的粒子集合 {,} ,權值=1/N,i=1,2,…,N。
4)結果輸出
根據組合導航系統的離散狀態方程式 (7)和觀測方程式 (6),只須設定濾波初值,就可獲得第k時刻的系統狀態最優估計值xk,k=1,2,3…。
4 仿真分析
本文主要研究INS/GPS組合導航數據融合算法的精度,仿真期間保證系統在組合模式下工作。INS/GPS組合導航系統的初始參數和仿真參數如表1和表2所示。仿真選取典型的飛機機動軌跡,該軌跡包含滑跑、加速拉起、爬高、改平、平飛、預轉彎、轉彎、減速飛行、低頭、俯沖等機動動作,仿真時長為3 600s,其軌跡如圖2所示。
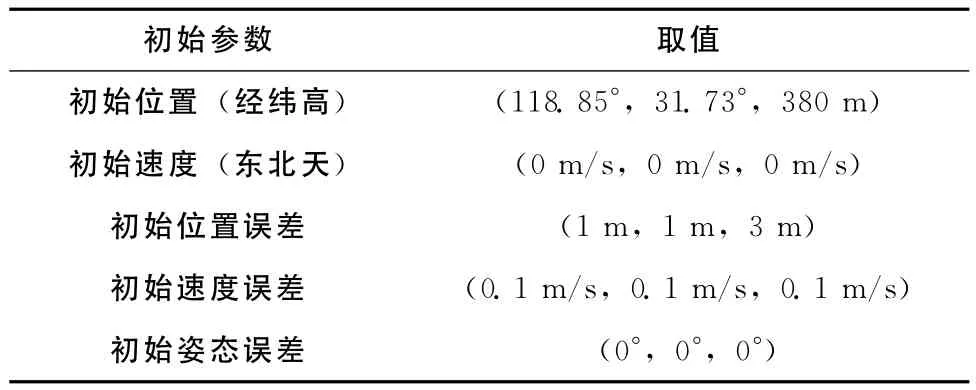
表1 INS/GPS組合導航系統初始參數設置
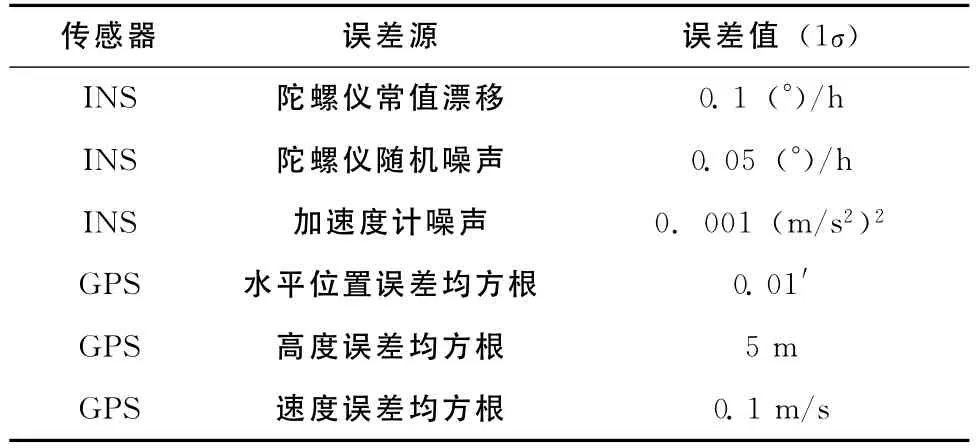
表2 INS/GPS組合導航系統仿真參數設置

圖2 飛行軌跡仿真
在上述條件下,分別對INS/GPS組合導航系統的直接法UPF和UKF進行了仿真研究,并對仿真結果進行比較分析。為保證組合導航系統直接法濾波的精度并控制濾波計算量,濾波粒子數N取為1 000,并取α=1,β=0,k=2。由于篇幅有限,且東向和北向導航結果具有相似性,本文僅對東向 (經度)、天向 (高度)的位置和速度誤差進行數值計算分析,其仿真結果如圖3、圖4所示。
從圖3和圖4可以看出,應用UKF組合導航系統經度誤差可控制在±13m以內,高度誤差在±15m以內,速度誤差在±0.6m/s以內。而應用UPF的組合導航系統經緯度誤差控制在±6m以內,高度誤差在±10m以內,速度誤差在±0.5 m/s以內。通過上述兩種濾波計算結果的比較,說明了基于UPF濾波的直接法INS/GPS組合導航系統可以獲得更高的導航精度,并能更準確地反映真實狀態的演變情況。
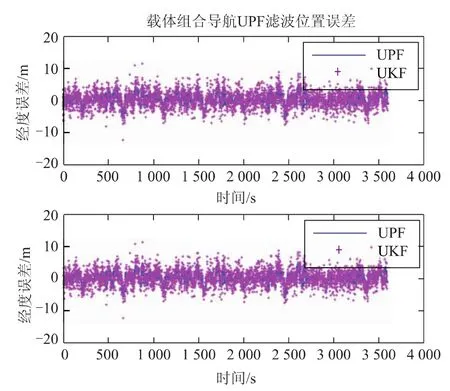
圖3 基于UPF和UKF算法的經度和高度位置誤差
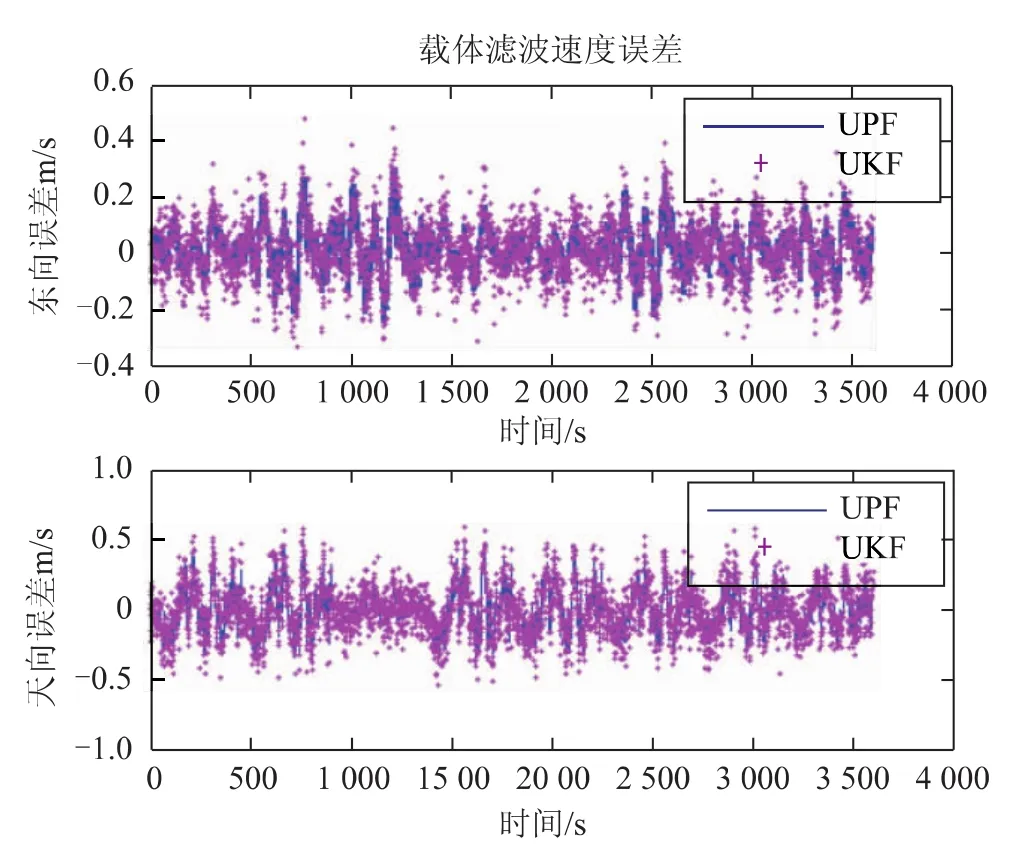
圖4 基于UPF和UKF算法的東向和天向速度誤差
5 結論
直接法UPF濾波在組合導航系統狀態結算過程中不含截斷誤差,濾波過程避免了慣導力學編排方程的許多重復計算,降低了算法冗余度。同時,閉環結構的濾波方法在GPS信號突然失效時系統可實現有效切換。仿真結果表明UPF算法與UKF算法相比,具有更高的估計效率和估計精度,解算過程具有較強的魯棒性。
[1]全偉,劉百奇,宮曉琳.慣性/天文/衛星組合導航技術[M].北京:國防工業出版社,2011.
[2]劉建業,曾慶化,趙偉.導航系統理論與應用[M].西安:西北工業大學出版社,2010.
[3]秦永元,張洪鉞,汪叔華.卡爾曼濾波與組合導航原理[M].西安:西北工業大學出版社,1998.
[4]程水英,張劍云.粒子濾波評述[J].宇航學報,2008,29(4):1099-1112.
[5]趙琳,王小旭,丁繼成.組合導航系統非線性濾波算法綜述[J].中國慣性技術學報,2009,17(1):46-54.
[6]楊波,秦永元,柴艷.UKF在INS/GPS直接法卡爾曼濾波中的應用[J].傳感技術學報,2007,20(4):842-846.
[7]汪秋婷,胡修林.基于UKF的新型北斗/SINS組合系統直接法卡爾曼濾波[J].系統工程與電子技術,2010,32(2):376-379.
[8]BENGTSSON T,SNYDER C,NYCHKA D.Toward a Nonlinear Ensemble Filter for High Dimensional Systems[J].Journal of Geophysical Research,2003,108(D24):8775-8785.
[9]VAN DER MERWE R,DOUCET A,DE FREITAS N,etal.The Unscented Particle Filter[EB/OL].[2013-02-16].http://automatica.dei.unipd.it/tl_files/utenti/lucaschenato/Classes/PSC10 _11/UPF _slides.pdf.
[10]VAN DER MERWE R,DOUCET A,DE FREITAS N,eta1.The Unscented Particle Filter Technical Report[R].Cambridge:Department of Engineering,University of Cambridge,2000.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
