基于FPGA的S模式應(yīng)答機(jī)設(shè)計(jì)
2013-07-20 02:49:58李超史忠科
計(jì)算機(jī)工程與應(yīng)用 2013年13期
李超,史忠科
西北工業(yè)大學(xué) 自動(dòng)化學(xué)院,西安 710129
基于FPGA的S模式應(yīng)答機(jī)設(shè)計(jì)
李超,史忠科
西北工業(yè)大學(xué) 自動(dòng)化學(xué)院,西安 710129
1 引言
S模式應(yīng)答機(jī)是一種所有飛機(jī)必須裝備的機(jī)載通信設(shè)備,用于報(bào)告本機(jī)信息,保障飛行安全[1]。在通用航空中,飛機(jī)主要以目視規(guī)則運(yùn)行,且飛行機(jī)動(dòng)性大,存在較大隱患。廣播式自動(dòng)相關(guān)監(jiān)視(ADS-B)是以廣播的形式將本機(jī)的GPS方位、速度,以及氣壓高度等信息以約每0.5 s一次的頻率發(fā)送給附近的飛機(jī)以及地面站,使附近飛機(jī)進(jìn)行避讓的一種防撞方法[2-3],可以有效保障通用航空的飛行安全,其1090ES數(shù)據(jù)鏈通過對(duì)S模式應(yīng)答機(jī)升級(jí)就可實(shí)現(xiàn)[4],在數(shù)據(jù)鏈能力以及成本方面均占有優(yōu)勢(shì)。
然而,現(xiàn)有的S模式應(yīng)答機(jī)的控制器與收發(fā)電路仍然采用傳統(tǒng)數(shù)字電路來完成對(duì)數(shù)字信號(hào)的處理[5-6],這就直接導(dǎo)致其設(shè)備龐大,成本過高,不利于在內(nèi)部空間有限的小型通用航空飛機(jī)尤其是無人機(jī)上使用,在低空空域開放的局勢(shì)下,阻礙了通用航空的發(fā)展。現(xiàn)場可編程邏輯門陣列(FPGA)具有并行處理能力強(qiáng),集成度高,實(shí)時(shí)性好的特點(diǎn),非常適合于高速數(shù)字信號(hào)處理的應(yīng)用。針對(duì)以上分析,本文設(shè)計(jì)了一種基于FPGA的通用S模式應(yīng)答機(jī),僅采用一片小型FPGA,就實(shí)現(xiàn)了S模式應(yīng)答機(jī)所需全部功能。
2 系統(tǒng)功能分析
2.1 總線接口設(shè)計(jì)
為了獲取本機(jī)信息,系統(tǒng)需要與ARINC429總線通信來獲取本機(jī)高度以及代號(hào),通過RS232總線獲取GPS數(shù)據(jù)[5]。本文采用兩片電平轉(zhuǎn)換芯片將總線電平轉(zhuǎn)換為FPGA使用的LVTTL電平,在FPGA中進(jìn)行本機(jī)信息的接收;由于這種技術(shù)目前已十分成熟,因此本文概不冗述。
2.2 通信編解碼的實(shí)現(xiàn)
應(yīng)答機(jī)的功能就是對(duì)詢問信號(hào)解碼,自動(dòng)識(shí)別,并以相應(yīng)格式編碼應(yīng)答。S模式應(yīng)答機(jī)的通信格式有A、C與S模式,其中A模式為飛機(jī)代號(hào)詢問,C模式為飛機(jī)高度詢問,S模式以S模式數(shù)據(jù)鏈通信,包括飛機(jī)代號(hào)、高度、速度、在空中/在地面等一系列信息,其通信格式如圖1所示[7]。

圖1 S模式應(yīng)答機(jī)的信號(hào)格式
2.3 抗干擾設(shè)計(jì)
當(dāng)信號(hào)由通信板傳來時(shí),由于空間場干擾、電源干擾及信號(hào)通道干擾,造成信號(hào)的毛刺,脈沖寬度的變化等,無法直接對(duì)其進(jìn)行解碼,因此必須對(duì)信號(hào)進(jìn)行濾波整形。本文在FPGA內(nèi)設(shè)計(jì)了一種數(shù)字濾波器,用于S模式應(yīng)答機(jī)接收信號(hào)的濾波。
3 通信編解碼部分設(shè)計(jì)
系統(tǒng)需要解碼的信號(hào)有A/C模式詢問信號(hào)以及S模式詢問信號(hào),如圖1所示,其中P1、P2、P3脈沖均為0.8 μs,而P4脈沖寬度僅在A模式為0.8 μs,A-C/S模式為1.6 μs。系統(tǒng)中編解碼模塊均采用狀態(tài)機(jī)的方法實(shí)現(xiàn)。濾波后的信號(hào)送入解碼模塊后,如果是A/C模式詢問信號(hào),則對(duì)A/C編碼模塊發(fā)送信號(hào)讓其以PCM編碼應(yīng)答;如果是A/S、C/S、或S模式詢問信號(hào),則對(duì)S模式編碼模塊發(fā)送信號(hào)并傳輸數(shù)據(jù),讓其按相應(yīng)格式以PPM編碼發(fā)送數(shù)據(jù)應(yīng)答。
如果正在對(duì)一個(gè)詢問進(jìn)行應(yīng)答時(shí)接到另一個(gè)詢問信號(hào),解碼模塊會(huì)將其延后至應(yīng)答結(jié)束,并等待50 μs后給相應(yīng)的模塊發(fā)送信號(hào)及數(shù)據(jù),使其應(yīng)答。基于ADS-B的相關(guān)規(guī)定,為避免信號(hào)混疊,本文在解碼模塊中設(shè)置了一個(gè)隨機(jī)數(shù)發(fā)生器,使其可每隔500 ms±100 ms產(chǎn)生一個(gè)信號(hào),如果空閑,則使S模式調(diào)制模塊廣播本機(jī)ADS-B數(shù)據(jù),如果忙碌,則延后發(fā)送[8]。
編、解碼部分的流程如圖2所示。采用狀態(tài)機(jī)的方法來自動(dòng)識(shí)別A模式、C模式和S模式的信號(hào),其中PA3至PA5狀態(tài)、PC3至PC5狀態(tài)、PS3至PS6狀態(tài)分別代表檢測到A模式、C模式和S模式詢問。P0為等待狀態(tài);當(dāng)檢測到脈沖上升沿時(shí),進(jìn)入P1狀態(tài);如果在0.8 μs后檢測到下降沿,即接收到了完整的P1脈沖,進(jìn)入P2狀態(tài),否則若在0.7 μs以內(nèi)檢測到下降沿或超過0.9 μs未發(fā)現(xiàn)下降沿,說明這個(gè)高電平信號(hào)不是要接收的P1脈沖,返回等待狀態(tài)P0;在P2狀態(tài)時(shí),根據(jù)不同模式P1狀態(tài)與P2脈沖的間距不同,若在1.2 μs后檢測到上升沿,進(jìn)入PS3狀態(tài),若在7.2 μs后檢測到上升沿,進(jìn)入PA3狀態(tài),若在20.2 μs后檢測到上升沿,則進(jìn)入PC3狀態(tài)。后面信號(hào)流程與之前類似,其輸出結(jié)果如圖中所示,其中輸出A/C模式將發(fā)送信號(hào)至A/C模式編碼模塊令其以相應(yīng)模式應(yīng)答,而輸出S模式將發(fā)送信號(hào)至S模式編碼模塊并開始接收數(shù)據(jù)。

圖2 編、解碼部分流程圖
實(shí)驗(yàn)效果如圖3所示,以A模式和S模式為例。可以看出,系統(tǒng)對(duì)詢問信號(hào)能以相應(yīng)格式進(jìn)行應(yīng)答,滿足系統(tǒng)要求。
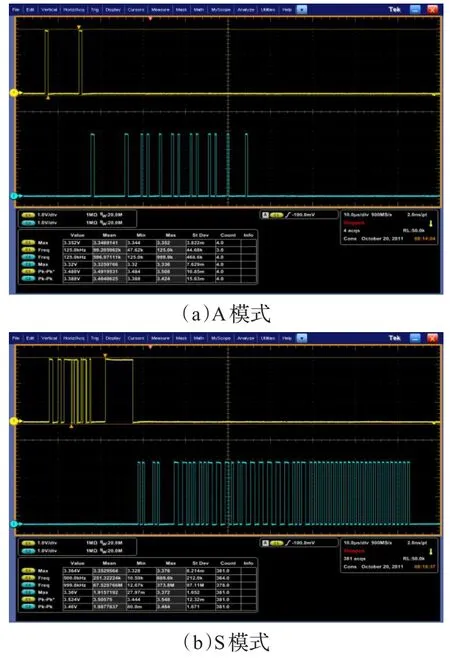
圖3 濾波后詢問信號(hào)與應(yīng)答信號(hào)對(duì)比圖
4 數(shù)字濾波部分設(shè)計(jì)
當(dāng)信號(hào)由通信板傳來時(shí),由于空間場干擾、電源干擾及信號(hào)通道干擾,造成信號(hào)的毛刺、脈沖寬度的變化等,將使編解碼模塊無法正常進(jìn)行解碼,造成信號(hào)的丟失,當(dāng)干擾較強(qiáng)時(shí)這種現(xiàn)象尤為嚴(yán)重。圖4為無數(shù)字濾波器時(shí)系統(tǒng)對(duì)信號(hào)的響應(yīng)。這里對(duì)系統(tǒng)發(fā)出一組測試信號(hào),以觀察系統(tǒng)的響應(yīng)。由于在實(shí)驗(yàn)室中進(jìn)行實(shí)驗(yàn),干擾較小,因此譯碼率較高,用濾波器難以提取解碼錯(cuò)誤片段,因此,這里使用Signal Tap II采集數(shù)據(jù)。可以看出,圖4(a)中4 096~4 608采樣點(diǎn)之間的C/S模式全呼叫詢問因脈沖寬度發(fā)生變化,因此無法成功解碼,導(dǎo)致沒有應(yīng)答;而圖4(b)中4 608~6 144采樣點(diǎn)之間的A模式全呼叫及C模式全呼叫也因?yàn)槊}沖寬度變化沒有應(yīng)答。因此,必須在系統(tǒng)中加入數(shù)字濾波器,否則可能因?yàn)閷?duì)詢問信號(hào)無響應(yīng)而發(fā)生危險(xiǎn)。
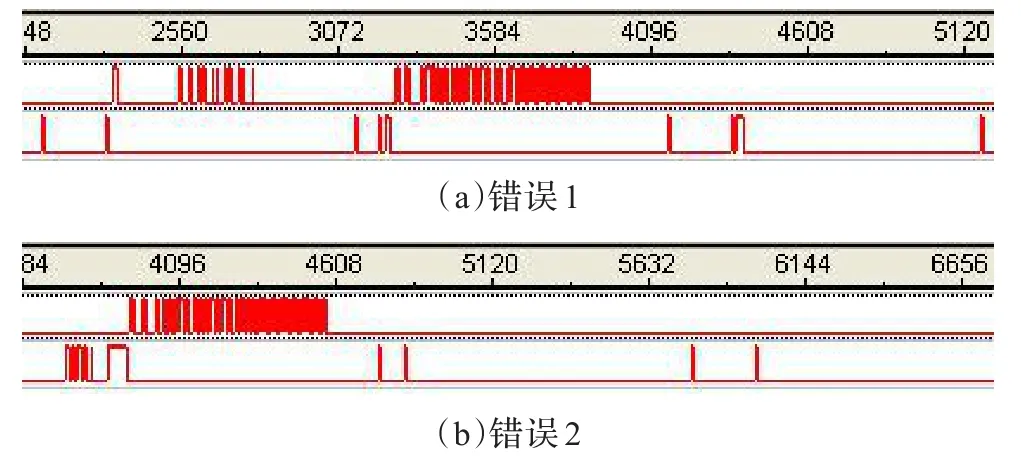
圖4 無濾波器時(shí)解碼錯(cuò)誤
當(dāng)FPGA收到由通信板經(jīng)光耦傳來的信號(hào)時(shí),所有毛刺干擾經(jīng)過FPGA的I/O管腳之后均會(huì)變成脈沖干擾。由于所有送往FPGA的信號(hào)均為脈沖信號(hào),如果將其轉(zhuǎn)為數(shù)字信號(hào)并設(shè)計(jì)FIR濾波器進(jìn)行濾波,延遲明顯偏大。而使用脈沖寬度濾波方法簡單,占用資源小,延遲小,效果較好。經(jīng)實(shí)際測試,干擾脈寬大多較窄,不超過0.1 μs,只有極少數(shù)干擾較寬,最寬也不超過0.3 μs。而由前文可知,所有頭脈沖部分脈沖信號(hào)最窄為0.8 μs,詢問信號(hào)中只有S模式詢問數(shù)據(jù)為0.25 μs一個(gè)碼元;根據(jù)DO-181D以及GB12183[9]的規(guī)定,頭脈沖允許±0.1 μs的誤差。當(dāng)解碼模塊在檢測到S模式頭脈沖后,開始接收數(shù)據(jù)時(shí),將返還給濾波模塊的en信號(hào)置1。當(dāng)en=0時(shí),將寬度小于0.65 μs的任何信號(hào)視為干擾濾掉;en=1時(shí),只將寬度小于0.2 μs的信號(hào)視為干擾濾掉。這樣,即使偶爾某些較寬的干擾脈沖出現(xiàn)在數(shù)據(jù)段,導(dǎo)致接收錯(cuò)誤,也可通過數(shù)據(jù)中包含的奇偶校驗(yàn)位來發(fā)現(xiàn)。
系統(tǒng)采用了20M的時(shí)鐘信號(hào),濾波器以每個(gè)時(shí)鐘周期0.05 μs對(duì)信號(hào)進(jìn)行采樣,將采樣的數(shù)據(jù)依次循環(huán)存儲(chǔ)在15個(gè)二進(jìn)制寄存器中,并使用加法器將其相加。如果其和大于等于12,則輸出高電平,并在結(jié)果小于12后使用計(jì)數(shù)器保持高電平11個(gè)時(shí)鐘周期,以復(fù)現(xiàn)輸入的波形。當(dāng)檢波模塊返還的en信號(hào)為1時(shí),將采樣的數(shù)據(jù)存儲(chǔ)在另外4個(gè)寄存器中,并相加,如果大于等于3,則輸出高電平,并用計(jì)數(shù)器保持。為了使兩部分濾波器相配合,則將0.25 μs濾波器數(shù)據(jù)放入一個(gè)9位的寄存器的末位,每個(gè)時(shí)鐘周期將寄存器后一位的值賦予前一位,并將第一位的數(shù)據(jù)作為濾波結(jié)果輸出,以達(dá)到延后的效果。en=0濾波器的流程圖如圖5所示,其中add1為15位加法器的輸出,cnt1是一個(gè)計(jì)數(shù)器,每當(dāng)時(shí)鐘上升沿自增1,Z為濾波器輸出。en=1時(shí)與其類似,僅加法器與計(jì)數(shù)器的位數(shù)不同。

圖5 en=0時(shí)濾波器流程圖
濾波效果如圖6所示,其中,圖6(a)為A模式全呼叫詢問信號(hào),圖6(b)為S模式全呼叫詢問信號(hào),圖6(c)和圖6(d)分別為在強(qiáng)干擾下的僅C模式全呼叫詢問信號(hào)和S模式全呼叫詢問信號(hào)的濾波效果,所有圖均為5 μs/div。由圖可以看出,濾波延遲僅有1 μs左右;經(jīng)過大量實(shí)驗(yàn)數(shù)據(jù)表明,在弱干擾下譯碼率接近100%,強(qiáng)干擾下譯碼率較低,僅有76%左右,預(yù)期濾波效果已經(jīng)達(dá)到。

圖6 濾波效果圖
5 系統(tǒng)總體測試及對(duì)比
5.1 系統(tǒng)資源占用情況
采用了一片Altera的EP2C8T133C8芯片作為系統(tǒng)的主芯片。系統(tǒng)各功能模塊在FPGA上實(shí)現(xiàn)后,占用資源情況如表1所示。

表1 主要資源模塊占用情況
從表1中可以看出,整個(gè)系統(tǒng)模塊占用內(nèi)部LE 3 071個(gè),約為37%,寄存器(registers)1 078個(gè),約為13%,內(nèi)部存儲(chǔ)單元(memory bits)61 440個(gè),約為37%,滿足選型時(shí)出于系統(tǒng)余度考慮的3倍的要求。
5.2 系統(tǒng)實(shí)驗(yàn)結(jié)果
使用自制的通信板進(jìn)行了實(shí)驗(yàn),使用Tektronix公司的DPO7354示波器對(duì)實(shí)驗(yàn)數(shù)據(jù)進(jìn)行了采集,限于篇幅,僅列出具有代表性的實(shí)驗(yàn)結(jié)果,如圖7所示。圖中依次為對(duì)A模式、C模式、A/S模式、C/S模式、僅C模式以及S模式詢問的應(yīng)答,頻道1為接收到的詢問信號(hào),頻道2為所產(chǎn)生的應(yīng)答,詢問信號(hào)后的脈沖為應(yīng)答信號(hào)對(duì)示波器探頭所產(chǎn)生的干擾。

圖7 詢問信號(hào)與應(yīng)答信號(hào)對(duì)比圖
從圖7可以看出,系統(tǒng)設(shè)計(jì)的濾波器成功地濾掉了干擾,并進(jìn)行了檢波,做出了相應(yīng)的應(yīng)答。對(duì)A模式、C模式分別以相應(yīng)模式的PCM編碼應(yīng)答;對(duì)A/S、C/S模式以S模式全呼叫回答進(jìn)行應(yīng)答;對(duì)僅C模式成功抑制,不進(jìn)行應(yīng)答;對(duì)于S模式則以相應(yīng)數(shù)據(jù)格式進(jìn)行應(yīng)答。

表2 系統(tǒng)與傳統(tǒng)應(yīng)答機(jī)的對(duì)比
5.3 與傳統(tǒng)應(yīng)答機(jī)的對(duì)比
與Rockwell Collins公司2009年的產(chǎn)品TPR-901應(yīng)答機(jī)以及Honeywell公司2005年的產(chǎn)品KT-73應(yīng)答機(jī)在體積、重量兩方面進(jìn)行對(duì)比,如表2所示,可見本文系統(tǒng)比目前最小的應(yīng)答機(jī)小一半以上。由于通信板尚未小型化,系統(tǒng)尚未工程化,給出的數(shù)據(jù)僅為估計(jì)值。
6 結(jié)束語
本文針對(duì)現(xiàn)有S模式應(yīng)答機(jī)體積、重量過大的缺陷,設(shè)計(jì)了一種基于FPGA的新型S模式應(yīng)答機(jī)。系統(tǒng)由總線接口、通信編解碼及抗干擾設(shè)計(jì)三部分組成,經(jīng)過測試,三部分均工作穩(wěn)定,能在有干擾的環(huán)境下對(duì)詢問信號(hào)進(jìn)行應(yīng)答。實(shí)驗(yàn)結(jié)果表明,該系統(tǒng)的體積和質(zhì)量比傳統(tǒng)S模式應(yīng)答機(jī)小,并且成本更低,有著較好的應(yīng)用前景。
[1]Spalding D J.Mode S-the future[J].Aviation Surveillance Systems, 2002(1):1-4.
[2]Boisvert R E,Orlando V A.ADS-MODE S system overview[C]// Proceedings of the Digital Avionics Systems Conference,1993:104-109.
[3]Speealman L,Lee K.Cargo airline association ADS-B data link evaluation and production[C]//Proceedings of the AIAA/IEEE Digital Avionics Systems Conference,1999.
[4]Chung W W,Staab R.A 1090 extended squitter automatic dependent surveillance-broadcast(ADS-B)reception model for air-traffic-management simulations[C]//Proceedings of the AIAA Modeling and Simulation Technologies Conference and Exhibit,2006,8:1-11.
[5]Honeywell.Bendix/King KT 73 data link transponder.System Installation Manual,2005.
[6]Rockwell Collins.Rockwell Collins TPR-901-003/021 transponders.System Installation Manual,2009.
[7]RTCA.DO-181D Minimum operational performance standards for Air Traffic Control Radar Beacon System/Mode Select(ATCRBS/MODE S)airborne equipment[S].Washington,D C,2007.
[8]RTCA.DO-260B Minimum operational performance standards for 1 090 MHz Automatic Dependent Surveillance-Broadcast(ADS-B)[S].Washington,D C,2006.
[9]國家技術(shù)監(jiān)督局.GB12183空中交通管制機(jī)載應(yīng)答機(jī)通用技術(shù)條件[S].北京,1990.
LI Chao,SHI Zhongke
Institute of Automation,Northwestern Polytechnical University,Xi’an 710129,China
Aimed at large volume,heavy weight of the existing mode S transponder,thus it is not applicable to small general aviation aircraft especially small UAVs(Unmanned Aerial Vehicles),a new mode S transponder of general aviation is designed.The system adopts all-FPGA(Field Programmable Gate Array)design,the state machine is used to approach the realization of encoding and decoding function,a digital filter for the signal is designed by pulse width filtering method.The test results show that the system works stably,response of the interrogation signal is realized,and meets the RTCA DO-181D and DO-260B standards.For the system’s advantages of small volume,light weight,low cost,it is suitable for the general aviation aircraft whose interior space is limited.
mode S transponder;Field Programmable Gate Array(FPGA);general aviation;state machine;digital filter
針對(duì)現(xiàn)有S模式應(yīng)答機(jī)體積、重量過大,不適用于小型通用航空飛機(jī)尤其是無人機(jī)的現(xiàn)狀,設(shè)計(jì)了一種用于通用航空的新型S模式應(yīng)答機(jī)。系統(tǒng)采用全FPGA設(shè)計(jì),用狀態(tài)機(jī)的方法實(shí)現(xiàn)編碼、解碼功能,使用脈沖寬度濾波的方法對(duì)通訊信號(hào)進(jìn)行了數(shù)字濾波。實(shí)驗(yàn)結(jié)果表明:該系統(tǒng)工作穩(wěn)定,實(shí)現(xiàn)了對(duì)詢問信號(hào)的應(yīng)答,符合RTCA的DO-181D及DO-260B標(biāo)準(zhǔn);并且具有體積小,重量輕,成本低等特點(diǎn),適用于內(nèi)部空間有限的各種小型通用航空飛行器。
S模式應(yīng)答機(jī);現(xiàn)場可編程門陣列(FPGA);通用航空;狀態(tài)機(jī);數(shù)字濾波
A
TN911.72
10.3778/j.issn.1002-8331.1204-0775
LI Chao,SHI Zhongke.Design of mode S transponder based on FPGA.Computer Engineering and Applications,2013, 49(13):31-35.
國家自然科學(xué)重點(diǎn)基金(No.61143004)。
李超(1986—),男,碩士研究生,主要研究方向?yàn)橛布娐吩O(shè)計(jì)以及FPGA數(shù)字信號(hào)處理。E-mail:limiaosen@sina.com
2012-05-10
2012-08-27
1002-8331(2013)13-0031-05
CNKI出版日期:2012-11-28http://www.cnki.net/kcms/detail/11.2127.TP.20121128.1456.023.html
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
