一種可選向行星傳動輪機構
2013-07-06 03:10:44秦孝康劉任文李亞軍宋廣舒
科技視界 2013年8期
秦孝康 劉任文 李亞軍 宋廣舒 孫 偉
(鄭州大學 機械工程學院,河南 鄭州 450001)
0 引言
在當今社會,各種從動輪機構遍布我們的生產、生活中,可謂各式各樣、琳瑯滿目。但現今存在的從動輪或者僅從屬于主動輪運動如常見的普通車輪等,或者可以限制輪子轉動方向實現單向轉動如棘輪等。但都存在很大不便,如前者無法在需要限制轉動方向時實現單向傳動,而后者只能使機構單向傳動而限制了機構轉動方向的多樣性和可選擇性。因此,有必要開發一種既能實現兩個方向自由轉動,又能在需要時實現單方向限制性轉動的從動輪機構。
1 從動輪機構概述
1.1 從動輪介紹
主動輪就是提供動力,輸出扭矩和功率的輪,從動輪就是不提供動力,不輸出功率和扭矩的輪。主動輪對于機動車輛來說十分重要,但是從動輪同樣也是不可或缺的,特別對于一些特殊用途的車輛來說,從動輪發揮的作用并不比主動輪差。
1.2 何謂可選向從動輪
可選向從動輪區別于普通從動輪之處在于:它可以根據需要選擇從動輪可以實現的轉向,如①只允許順時針轉動、②只允許逆時針轉動、③根據實際情況臨時允許順時針或逆時針轉動機構等等。如棘輪就是一種只允許向一個方向轉動,而不可以相反方向的機構。
2 可選向行星傳動輪機構的初步設計
2.1 設計目的
本文要解決的技術問題是提供一種既能實現兩個方向自由轉動,又能在需要時實現單方向限制性轉動的從動輪機構。
2.2 技術方案
為解決上述技術問題,本文所采取的技術方案是:一種可選向行星傳動輪機構,其特征在于:包括兩個相對設置的三腳架、三個輪系機構、鏈輪鏈條機構和驅動機構;三個輪系機構分別安裝在兩個三腳架的三個支腳上;每個輪系機構都由主鏈輪軸、主鏈輪、空心絲桿、螺母、摩擦片、棘輪和橡膠輪組成;其中,主鏈輪軸通過軸承安裝在兩個三腳架的支腳上;從第一三腳架到第二三腳架之間,空心絲桿、主鏈輪、螺母、摩擦片和棘輪依次套裝在主鏈輪軸上,并且空心絲桿固定在第一三腳架的支腳上,主鏈輪與螺母固定后旋接在空心絲桿上,棘輪與主鏈輪軸固定連接;橡膠輪套在主鏈輪軸上,并且橡膠輪安裝在棘輪上;鏈輪鏈條機構包括驅動鏈輪和鏈條;驅動鏈輪設在第一三腳架的中心位置上;驅動鏈輪與三個主鏈輪之間通過鏈條連接;驅動機構包括設在第二三腳架上的減速電機;所述驅動鏈輪安裝在減速電機的軸上。
2.3 方案優勢
采用上述技術方案所產生的有益效果在于:本設計方案的主要功能在于從動于主動輪的運動,提供支撐,保持機構運行的正常進行;同時,該從動輪還可以有效影響主動輪的運動,包括在一定的條件和需要下有選擇的實現減速、制動等功能。本設計方案很好的解決了同一從動輪機構既能實現兩個方向自由轉動,又能在需要時實現單方向限制性轉動的問題,且該機構實現簡單,成本低廉,切實面向市場需要。
3 附圖說明
圖1是本設計方案的結構示意圖;
圖2是本設計方案的輪系機構的放大圖;
圖3是本設計方案的空心絲桿的結構示意圖;
圖4是本設計方案的鏈輪鏈條機構的結構示意圖;
圖5是本設計方案的驅動機構的結構示意圖。
圖1-圖5中,1-第一三腳架,2-第二三腳架,3-主鏈輪軸,4-主鏈輪,5-空心絲桿,6-螺母,7-摩擦片,8-棘輪,9-橡膠輪,10-驅動鏈輪,11-鏈條,12-輔助鏈輪,13-電位器,14-調緊鏈輪,15-聯軸器,16-減速電機,17-電機固定套。

圖1
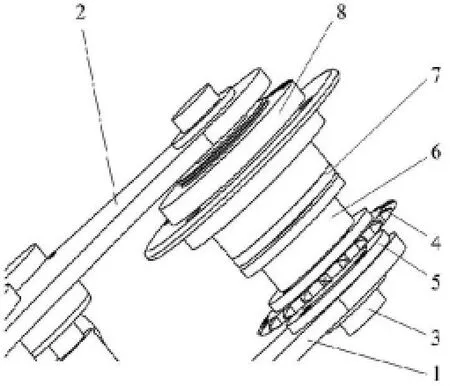
圖2
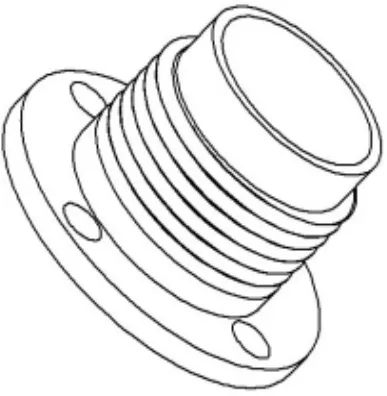
圖3

圖4
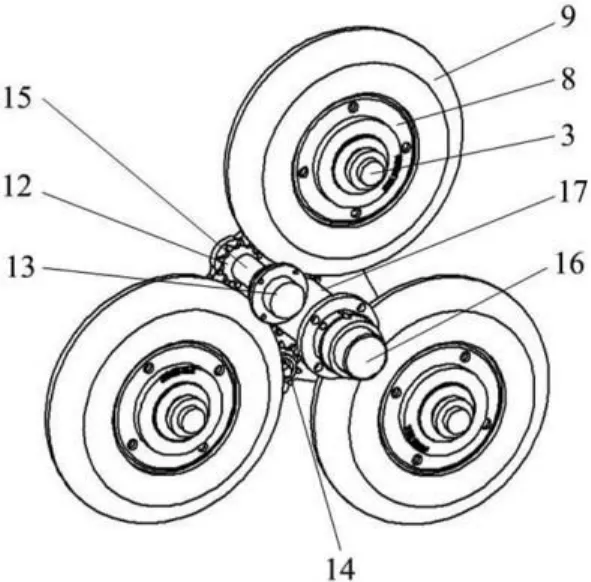
圖5
4 具體實施方式
下面結合附圖和具體實施方式對本設計方案作進一步詳細的說明。
如圖1所示為本設計方案的結構示意圖。本設計方案包括兩個相對設置的三腳架1、2、三個輪系機構、鏈輪鏈條機構和驅動機構;三個輪系機構分別安裝在兩個三腳架1、2的三個支腳上;每個輪系機構都由主鏈輪軸3、主鏈輪4、空心絲桿5、螺母6、摩擦片7、棘輪8和橡膠輪9組成;如圖2所示為本設計方案的輪系機構的放大圖,圖2中,主鏈輪軸3通過軸承安裝在兩個三腳架1、2的支腳上;從第一三腳架1到第二三腳架2之間,空心絲桿5、主鏈輪4、螺母6、摩擦片7和棘輪8依次套裝在主鏈輪軸 3上,并且空心絲桿5固定在第一三腳架1的支腳上,如圖3所示為本設計方案的空心絲桿5的結構示意圖,空心絲桿5的一端帶有法蘭,空心絲桿5與第一三腳架1之間為法蘭連接;主鏈輪4與螺母6固定后旋接在空心絲桿5上,棘輪8與主鏈輪軸3固定連接;橡膠輪9套在主鏈輪軸3上,并且橡膠輪9安裝在棘輪8上。
螺母6與主鏈輪軸3無直接接觸,這樣,當主鏈輪4轉動時,由于與其相連的螺母6和與第一三腳架1連接的空心絲桿5之間的螺旋作用,將主鏈輪4的旋轉運動轉化為直線運動,使得主鏈輪4與螺母6一同沿軸向遠離或接近第一三腳架1運動;棘輪8與主鏈輪軸3固定連接,橡膠輪9安裝在棘輪8上,當棘輪8固定不轉動時,橡膠輪9只能按照一個方向轉動;螺母6與棘輪8之間安裝有一摩擦片7,由于螺母6的軸向移動,將使其與棘輪8接觸或分離,這樣,當螺母6將摩擦片7與棘輪8逐漸壓緊的過程中,摩擦力也逐漸增大,當摩擦力足夠大時,棘輪8與主鏈輪軸3將不能再轉動,此時,橡膠輪9將只能沿一個方向轉動,從而實現橡膠輪9從能夠兩個方向自由轉動到只能沿一個方向轉動的轉變。
如圖4、5所示分別為本設計方案的鏈輪鏈條機構和驅動機構的結構示意圖。鏈輪鏈條機構包括驅動鏈輪10、鏈條11、輔助鏈輪12、電位器13和調緊鏈輪14;驅動機構包括設在第二三腳架2上的減速電機16,減速電機16的外部設有電機固定套17。驅動鏈輪10設在第一三腳架1的中心位置上,并且驅動鏈輪10安裝在減速電機16的軸上;輔助鏈輪12設在第一三腳架1上,且位于兩個主鏈輪4之間;輔助鏈輪12通過聯軸器15與電位器13連接,電位器13設在第二三腳架2上;調緊鏈輪14設在第一三腳架1上,驅動鏈輪10、三個主鏈輪4、輔助鏈輪12和調緊鏈輪14通過鏈條11連接,鏈條11的繞行方向如圖4中所示。
5 小結
本設計方案很好的解決了同一從動輪機構既能實現兩個方向自由轉動,又能在需要時實現單方向限制性轉動的問題,且該機構實現簡單,成本低廉,切實面向市場需要。
[1]陳璟.齒輪連桿機構的分析與綜合[D].福州大學,2004.
[2]鈕志紅.機構運動誤差分析方法及其運用[J].現代機械,1995(01).
[3]張星.差動輪系在自調勻整系統中的應用與分析[J].西北紡織工學院學報,1998(04).
[4]李昌熙,喬石,主編.礦山機械液壓傳動[M].煤炭工業出版社,1985.
[5]楊國欣,劉乃慶,孫裕晶.鏈傳動多邊形效應分析[J].農業與技術,1996(03).