飛輪儲(chǔ)能系統(tǒng)軸系本機(jī)動(dòng)平衡實(shí)驗(yàn)研究
2013-06-01 07:29:44張超平戴興建孟祥泳李勝忠
儲(chǔ)能科學(xué)與技術(shù) 2013年3期
關(guān)鍵詞:振動(dòng)
張超平,戴興建,孟祥泳,李勝忠,范 軍
(1中國(guó)石化中原石油工程有限公司,河南 濮陽(yáng) 457001;2清華大學(xué),北京 100084)
石油鉆機(jī)是鉆井勘探施工的主要裝備,機(jī)械石油鉆機(jī)在負(fù)荷周期性變化的起、下鉆工況中長(zhǎng)期存在“大馬拉小車”、“大馬拉重車”的不良工況[1],頻繁的沖擊負(fù)荷還阻礙了綠色動(dòng)力——天然氣發(fā)動(dòng)機(jī)的推廣使用。對(duì)于周期性變化的脈沖負(fù)荷特征,在動(dòng)力系統(tǒng)中引入電容或飛輪儲(chǔ)能調(diào)峰單元,既可以實(shí)現(xiàn)發(fā)動(dòng)機(jī)在高效率工況下的平穩(wěn)運(yùn)行,也可以實(shí)現(xiàn)下鉆鉆桿勢(shì)能回收利用[2-3]。飛輪儲(chǔ)能具有高功率、壽命長(zhǎng)、響應(yīng)快的優(yōu)點(diǎn),是動(dòng)力系統(tǒng)頻繁調(diào)峰的優(yōu)選儲(chǔ)能技術(shù)[4-6]。
在動(dòng)力系統(tǒng)中引進(jìn)400 kW/10 MJ飛輪儲(chǔ)能裝置后,在低負(fù)荷時(shí)利用內(nèi)燃機(jī)組的冗余出力帶動(dòng)直流調(diào)峰電機(jī)發(fā)電給飛輪儲(chǔ)能電源充電,在尖峰負(fù)荷出現(xiàn)時(shí),飛輪儲(chǔ)能電源放電(400 kW持續(xù)25 s),驅(qū)動(dòng)直流調(diào)峰電機(jī)做電動(dòng)運(yùn)行,向動(dòng)力系統(tǒng)提供充足的補(bǔ)充轉(zhuǎn)矩。分析表明,調(diào)峰運(yùn)行的動(dòng)力機(jī)組運(yùn)行平穩(wěn),并可減少冗余容量,有利于節(jié)能減排。
高速飛輪儲(chǔ)能系統(tǒng)中旋轉(zhuǎn)軸系的振動(dòng)問(wèn)題是系統(tǒng)可靠安全運(yùn)行需要解決的主要問(wèn)題之一。由于材質(zhì)、加工、安裝等各方面原因,飛輪電機(jī)轉(zhuǎn)子在加工好之后,質(zhì)量分布不夠均勻,其中心慣性主軸偏離旋轉(zhuǎn)軸線。轉(zhuǎn)子轉(zhuǎn)動(dòng)時(shí),轉(zhuǎn)子各微元質(zhì)量的離心慣性力所組成的力系不是一個(gè)平衡力系,這種不平衡是轉(zhuǎn)子振動(dòng)的最主要激發(fā)源,在飛輪高速旋轉(zhuǎn)的時(shí)候,會(huì)引起同步不平衡振動(dòng)[7-8]。而且轉(zhuǎn)子—軸承—機(jī)殼—基礎(chǔ)系統(tǒng)一般存在一個(gè)或多個(gè)共振模態(tài),其頻率低于額定轉(zhuǎn)動(dòng)頻率,不平衡較大的旋轉(zhuǎn)機(jī)械在通過(guò)共振頻率時(shí)會(huì)遇到振動(dòng)迅速增加的困難,因此必須采取有效方法減小轉(zhuǎn)子的不平衡量。
具體的方法是在轉(zhuǎn)子上選定適當(dāng)?shù)男U矫妫谄渖霞由线m當(dāng)?shù)男U|(zhì)量(或校正質(zhì)量組),盡量減少離心慣性力的合力和合力偶,將轉(zhuǎn)子運(yùn)行時(shí)振動(dòng)的幅值控制在允許范圍內(nèi)。
1 動(dòng)平衡實(shí)驗(yàn)裝置
飛輪電機(jī)軸系設(shè)計(jì)參數(shù)如下,充放電循環(huán)工作轉(zhuǎn)速:1800→3600→1800 r/min;飛輪電機(jī)總動(dòng)能:16.3 MJ;飛輪電機(jī)軸系總質(zhì)量:1650 kg;飛輪電機(jī)軸系轉(zhuǎn)動(dòng)慣量:230 kg·m2;軸系跨度1700 mm。
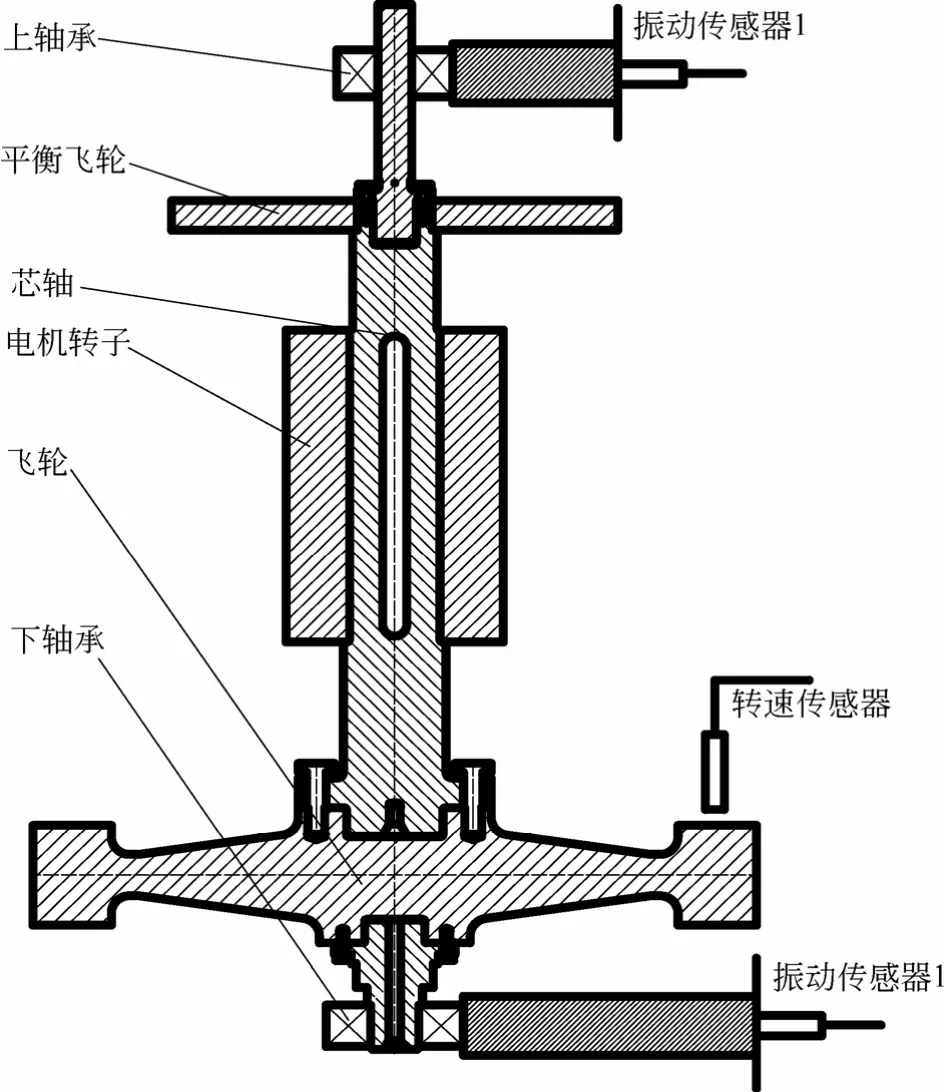
圖1 飛輪儲(chǔ)能電機(jī)軸系Fig. 1 Flywheel motor rotor bearing unit
飛輪電機(jī)軸系結(jié)構(gòu)如圖1所示,采用立式支承:在軸向上,上端采用非接觸永磁吸力軸承卸載飛輪電機(jī)總重量的90%~95%,以減少軸承摩擦損耗。為承擔(dān)永磁電機(jī)磁偏拉力,上端采用輕載徑向定位軸承即圖1中的上軸承。下端采用高速滾動(dòng)軸承定位即圖1中的下軸承。飛輪電機(jī)軸系的不平衡動(dòng)載荷由上、下軸承承擔(dān),為提高軸承的壽命,必須進(jìn)行高精度動(dòng)平衡,盡量減少軸承的動(dòng)載荷。
采用Rion公司產(chǎn)品SB-7700現(xiàn)場(chǎng)動(dòng)平衡儀進(jìn)行動(dòng)平衡。動(dòng)平衡儀有兩個(gè)加速度傳感器,測(cè)量?jī)蓚€(gè)測(cè)點(diǎn)的振動(dòng)(安裝在上下軸承殼體外,見(jiàn)圖1),轉(zhuǎn)速傳感器測(cè)定轉(zhuǎn)速、提供轉(zhuǎn)子振動(dòng)信號(hào)的相位基準(zhǔn)。動(dòng)平衡儀根據(jù)振動(dòng)信號(hào)、轉(zhuǎn)速相位信號(hào)進(jìn)行同頻分析,得到振動(dòng)中的不平衡響應(yīng)幅度和相位。采用影響系數(shù)法進(jìn)行動(dòng)平衡,首先測(cè)量原始振動(dòng)、然后測(cè)量試重引起的振動(dòng),動(dòng)平衡儀根據(jù)原始振動(dòng)和試重振動(dòng)計(jì)算出加重,之后再測(cè)量平衡后的振動(dòng)。動(dòng)平衡儀根據(jù)殘余振動(dòng)再計(jì)算下一次加重,直到殘余振動(dòng)滿足測(cè)試要求。動(dòng)平衡轉(zhuǎn)速選取在臨界轉(zhuǎn)速附近,測(cè)點(diǎn)一般選擇在軸承座上。
2 實(shí)驗(yàn)結(jié)果
2.1 單面動(dòng)平衡
為進(jìn)行粗平衡和了解飛輪軸系的加工及安裝工藝質(zhì)量,首先將飛輪軸系采用臥式支承,并用變頻電機(jī)帶動(dòng)皮帶驅(qū)動(dòng)飛輪旋轉(zhuǎn),單面動(dòng)平衡(加重面在飛輪上)后,可運(yùn)行到2100 r/min。
飛輪儲(chǔ)能電機(jī)立式軸系按實(shí)際工況垂直安裝后,在660 r/min存在共振峰,振動(dòng)幅值超過(guò)500 μm。這表明立式安裝軸系平衡狀態(tài)與臥式安裝存在較大差別,需要重新做低速動(dòng)平衡。600 r/min運(yùn)行下,平衡效果顯著,振動(dòng)幅值減少到50 μm。飛輪貼重量為 350 g ∠ 270°。
低速動(dòng)平衡后,可穩(wěn)定運(yùn)行到1600 r/min。超過(guò)1700 r/min,轉(zhuǎn)子系統(tǒng)遇到第2共振點(diǎn),振動(dòng)又快速增加。因此需要在1600、1750 r/min區(qū)間作單平面高速動(dòng)平衡。如圖2所示,動(dòng)平衡后(加重1:192 g ∠ 258°;加重 2:252 g ∠ 258°),可升速到 2700 r/min,但高速區(qū)振動(dòng)增加顯著,超過(guò)可接受水平。與低速動(dòng)平衡加重相比,加重量顯著減少。新的加重并未引起通過(guò)660 r/min過(guò)臨界困難。
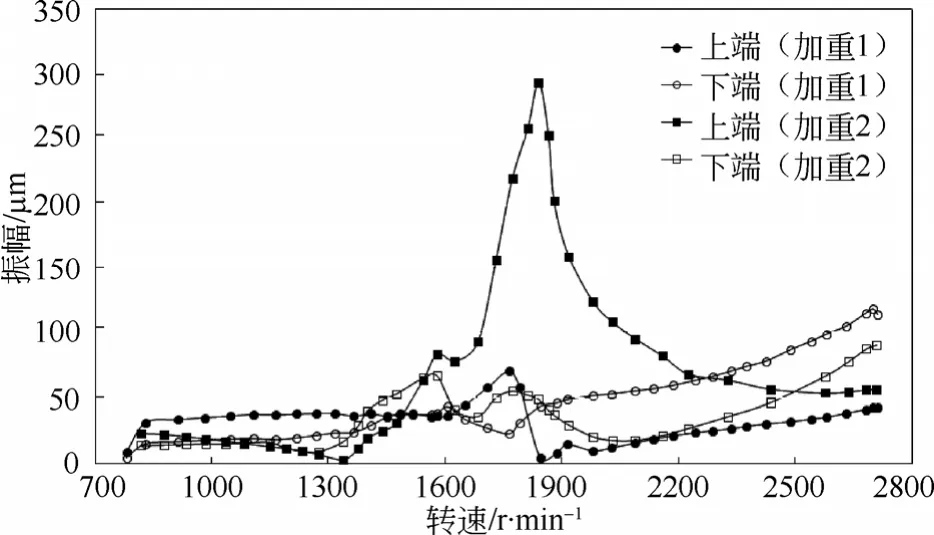
圖2 單平面平衡振動(dòng)特性Fig. 2 Vibration under one plane balancing
由圖2還可得,加重1條件下,通過(guò)第2共振區(qū)時(shí),上、下端振動(dòng)均小于70 μm,但2700 r/min時(shí),下端振動(dòng)超過(guò) 100 μm。加重 2條件下,2100~2700 r/min區(qū)間內(nèi),下端振動(dòng)顯著小于加重1,但上端的振動(dòng)顯著增加,通過(guò)第2共振區(qū)時(shí),最大振幅接近300 μm,因此單平面平衡不能達(dá)到理想的平衡效果。
2.2 雙面動(dòng)平衡
軸系的初步結(jié)構(gòu)中,飛輪有兩個(gè)加重面,但距離只有飛輪的厚度,動(dòng)平衡測(cè)試表明幾乎等同于一個(gè)加重面,軸系中上部電機(jī)轉(zhuǎn)子上的加重面無(wú)法利用,且其作用半徑小,效果不明顯。解決的辦法是在軸系上端增加平衡面,因此設(shè)計(jì)了一個(gè)外徑660 mm的動(dòng)平衡工藝飛輪盤(pán)(見(jiàn)圖1),專門(mén)為放置加重量。增加了平衡工藝盤(pán)后,1600 r/min處平衡后升速到2700 r/min,振動(dòng)由50 μm 減少到20 μm。圖3表明,第2共振區(qū)下在1600 r/min處的平衡有效地減少了共振振動(dòng),且減少了2600 r/min以上的振動(dòng),但機(jī)組下端的振動(dòng)在2300 r/min附近的共振幅度還是偏大,需要進(jìn)一步平衡。圖3還表明,充電升速和發(fā)電降速過(guò)程中,同一測(cè)點(diǎn)的振動(dòng)有一些差別。
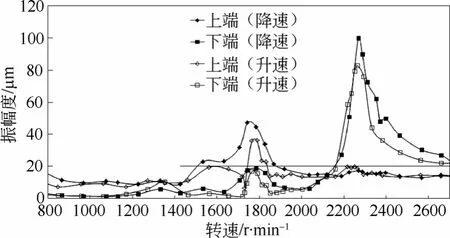
圖3 1600 r/min處平衡后振動(dòng)特性Fig. 3 Vibration after balancing at 1600 r/min
后續(xù)多次動(dòng)平衡測(cè)試表明:1800 r/min條件下動(dòng)平衡后,第3共振區(qū)2350~2500 r/min中下端共振振動(dòng)難以抑制,因此又在2350 r/min處動(dòng)平衡(見(jiàn)圖4),但此轉(zhuǎn)速下動(dòng)平衡卻破壞了1800 r/min下的動(dòng)平衡,即2400 r/min處的共振峰抑制后,卻又激發(fā)了第2共振點(diǎn)1900 r/min的共振,1900 r/min和2400 r/min處的共振峰不能得到同時(shí)抑制。2400 r/min的共振主要是下端振動(dòng)大,1900 r/min的共振峰主要是上端振動(dòng)大。
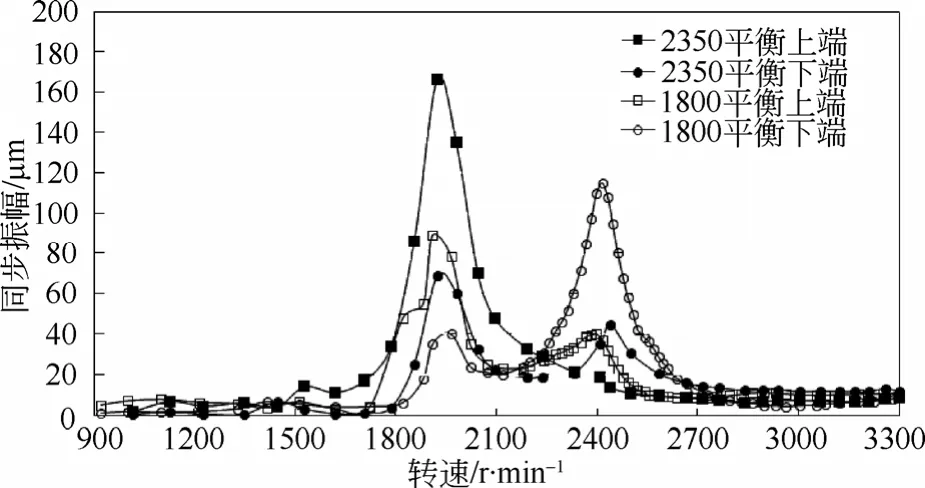
圖4 不同轉(zhuǎn)速下動(dòng)平衡Fig. 4 Balancing at different speeds
解決的思路是:首先在1800 r/min處動(dòng)平衡,然后于2200 r/min處再做動(dòng)平衡,平衡加重量的取舍要考慮1900 r/min共振點(diǎn)的振動(dòng)。
經(jīng)過(guò)多次動(dòng)平衡試驗(yàn)后確定的加重方案是:平衡工藝飛輪:118 g ∠ 290°;主飛輪:192 g ∠ 255°。精細(xì)動(dòng)平衡后,殘余失衡量小于2000 g·mm,偏心距小于2 μm,2600~3600 r/min區(qū)間內(nèi)可保持小于15 μm的振幅水平。
2.3 電機(jī)磁偏力影響
飛輪電機(jī)放電功率可根據(jù)發(fā)動(dòng)機(jī)傳動(dòng)系統(tǒng)需要調(diào)節(jié),測(cè)試了3種不同放電功率的振動(dòng)幅頻特性(見(jiàn)圖5)。2150 r/min共振點(diǎn)在上端處200 kW時(shí)振幅最大為230 μm;400 kW時(shí)振幅最小為140 μm;100 kW時(shí)振幅居中為170 μm。2600 r/min以上,放電功率對(duì)振幅影響較小。
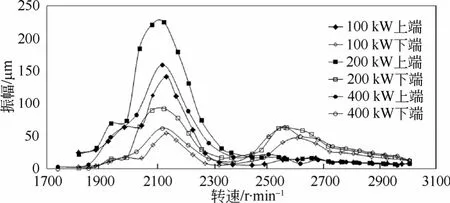
圖5 放電功率對(duì)振動(dòng)的影響Fig. 5 Power rate effect on the vibration
電機(jī)功率不同,電樞電流就有差別,因磁場(chǎng)不均勻、偏心引起偏心電磁力因電樞電流變化而改變。理論分析表明,這種磁偏力會(huì)引起軸系的附加振動(dòng)。軸系下端的振動(dòng)同樣受到電樞電流的影響。
3 結(jié) 論
立式飛輪電機(jī)軸系升速到額定3600 r/min過(guò)程中,將通過(guò)660、1900、2400 r/min 3個(gè)共振點(diǎn)。為通過(guò)臨界振動(dòng),選取了動(dòng)平衡轉(zhuǎn)速為600、1800和2200 r/min。為提高動(dòng)平衡效果,飛輪電機(jī)軸系增加了一個(gè)動(dòng)平衡工藝飛輪。動(dòng)平衡后高速運(yùn)轉(zhuǎn)區(qū)2600~3600 r/min區(qū)間振動(dòng)幅度小于15 μm。因電磁偏拉力作用,充電、放電、放電功率等因素對(duì)通過(guò)共振區(qū)的振動(dòng)幅度有顯著影響。
[1]Wang Lingjin(王令金),He Guodong(賀國(guó)棟),Wan Deyu(萬(wàn)德玉). Packaging operation and maintenance of drill rig engine[J].Oil Field Equipment(石油礦場(chǎng)機(jī)械),2004,33(1):50-53.,
[2]Wang Jun(王軍). Preliminary envisage on the application of super capacitor on oil rig[J].Oil Field Equipment(石油礦場(chǎng)機(jī)械),2009,38(12):97- 99.
[3]Zhang Chaoping(張超平),Sun Qingde(孫清德). 機(jī)械鉆機(jī)負(fù)載調(diào)峰裝置:中國(guó),201020191047.8[P]. 2011-01-12.
[4]Bolund B,Bernhoff H,Leijon M. Flywheel energy and power storage systems[J].Renewable and Sustainable Energy Reviews,2007,11(2):235-258.
[5]Kweder J,Wildfire P,Panther C,et al. Design of a flywheel based energy storage and distribution system for rural villages in China[J].SAE International Journal of Passenger Cars-Mechanical Systems,2009,2(1):703-712.
[6]Dai Xingjian(戴興建),Deng Zhanfeng(鄧占鋒),Liu Gang(劉剛),et al.Review on advanced flywheel energy storage system with large scale[J].Transactions of China Electrotechnical Society(電工技術(shù)學(xué)報(bào)),2011,26(7):133-139.
[7]Wen Bangchun(聞邦椿),Gu Jialiu(顧家柳),Xia Songbo(夏松波),Wang Zheng(王正). 高等轉(zhuǎn)子動(dòng)力學(xué)-理論、技術(shù)與應(yīng)用[M].Beijing:China Machine Press,1999.
[8]Dai Xingjian(戴興建),Zhang Xiaozhang(張小章),Jiang Xinjian(姜新建),et al.Flywheel energy storage technology in Tsinghua University[J].Energy Storage Science and Technology(儲(chǔ)能科學(xué)與技術(shù)),2012,1(1):64-68.
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
大電機(jī)技術(shù)(2022年5期)2022-11-17 08:12:48
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
瘋狂英語(yǔ)·新讀寫(xiě)(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(bào)(2018年4期)2018-09-14 03:40:58
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:44
計(jì)算物理(2014年2期)2014-03-11 17:01:44
鄭州大學(xué)學(xué)報(bào)(理學(xué)版)(2014年3期)2014-03-01 04:21:00
