新型同步箝位控制壓電馬達
2013-05-24 06:22:18賀良國劉永斌張連生潘巧生
振動與沖擊 2013年23期
關鍵詞:信號
賀良國,劉永斌,張 祺,張連生,潘巧生
壓電馬達一般具有結構簡單多樣、可控性好、可以輸出微位移、低速大扭矩、響應快、無電磁和噪聲干擾、不存在過載過壓自毀現象、斷電可自鎖、可在真空低溫等極端環境下工作等優點[1-2],受到現代工業以及國內外專家的廣泛關注,并且被廣泛的應用于航天器、機器人、照相機以及醫療設備等領域[3-4]。
根據定子和轉子的工作方式,壓電馬達可分為兩種[5]。一種是工作頻率相對較低的準靜態馬達,如尺蠖馬達[6-7]和慣性沖擊馬達[8-9]等;另一種是工作頻率相對較高的超聲馬達,如駐波馬達[10-11]和行波馬達[12-13]等。尺蠖馬達在輸出力以及效率方面比較有優勢,但由于準靜態下的工作頻率較低,從而輸出速度相對較低,如Frank等[6]設計的直線尺蠖馬達,輸出力高達150 N,但是工作頻率低于150 Hz,使得輸出速度最大只有1mm/s。慣性沖擊馬達相對于其他類型的馬達在結構、操作以及步進特性等方面具有優勢,但由于慣性沖擊馬達存在沖擊和滑動摩擦,該類型馬達的輸出力以及效率相對較低,如Zhang等[14]設計的慣性沖擊馬達,輸出力矩0.1 mN m,效率最大僅為0.1%。超聲馬達的主要優勢是速度相對較高,如Watson等[13]設計的旋轉超聲馬達轉速高達1 295 r/min,但是輸出力矩僅有13 nN m。摩擦耦合共振驅動型壓電馬達,較高的驅動頻率使壓電馬達能夠獲得較高的速度,但是連續摩擦造成的熱耗散以及磨損使馬達的效率不高[14],同時也會影響馬達的使用壽命[15]。
由上述分析,要使壓電馬達在力、速度、效率以及使用壽命方面得到提高,須滿足下面兩個基本條件:
(1)壓電馬達定子工作在共振狀態下;
(2)能量轉換和傳輸過程中,避免出現滑動摩擦。
本文首先針對上述第一點,利用超聲馬達的共振驅動方式使馬達工作在共振狀態下;其次針對第二點,利用尺蠖馬達的控制方式使能量轉換和傳輸過程中不出現滑動摩擦;最后參照電學原件可控硅及其在直流馬達中的應用,從電學參數電壓、電流到機械參數力、速度,設計了一種新型壓電馬達——諧振驅動同步箝位控制壓電馬達。
1 結構和原理
1.1 結構組成
圖1(a)所示為同步箝位控制壓電馬達的三維模型。馬達主要由振子、箝位開關、輸出軸和輔助結構等組成。振子由懸臂梁1和壓電陶瓷片2構成;箝位開關由壓電陶瓷片3和卡環4構成。輔助結構包括導引結構、預緊力結構及底座11。導引結構由直線軸承6和直線導引12構成;預緊力結構由柔性鉸鏈8(方形槽7以及U-型槽9形成柔性鉸鏈)和預緊螺釘10構成。卡環一端開口以減小其剛度保持其幾何精度,相對于開口端180°位置與底部粘結以提高整個箝位開關的剛度。調節預緊螺釘改變卡環4和光軸5之間的間隙及預緊力,克服箝位開關的制造誤差,保證壓電馬達箝位性能的發揮,使壓電馬達能夠正常工作。
1.2 工作原理
步進運動實現的三個條件為:驅動過程;箝位的動作過程;驅動和箝位的時序關系,即二者的協調配合過程。圖1(b)所示為同步箝位控制壓電馬達的驅動信號及控制原理圖。在同步控制過程中,采用正弦波電壓信號驅動振子,信號頻率為振子的共振頻率,使振子工作在共振狀態下;而箝位開關采用方波電壓信號驅動,方波的頻率和正弦波的頻率一致,使箝位開關工作在準靜態下。

圖1 壓電馬達的結構及工作原理Fig.1 Schematic diagram and working principle
1.2.1 驅動過程
振子和輸出軸的動力學模型如圖2所示。該模型忽略了輸出軸與導引之間的摩擦以及材料的阻尼,且初始分析不考慮負載。O1、O2分別是m1、m2在彈簧力為零時的初始位置。
振子在正弦電壓信號激勵下做簡諧振動,根據動量守恒定律及動力學知識,可得:

由以上兩式可得振子的位移y1,輸出軸的位移y2,簡諧振動的固有頻率ω,以及驅動輸出軸的驅動力(彈簧力)F:
式中δ是彈簧的變形量。
由式(3)和式(4)知,振子的簡諧振動激勵輸出軸做往復直線移動,可實現壓電馬達的驅動過程。
1.2.2 箝位過程
在方波電壓信號驅動下,箝位開關對輸出軸實現卡緊和松開動作。箝位開關卡緊時施加在輸出軸上的靜摩擦力fc如式(7)所示:

其中:Nc和μc分別表示正壓力和靜摩擦系數
當靜摩擦力大于最大驅動力(等于kδ)時,輸出軸被卡緊。箝位開關松開時,摩擦力為零,輸出軸可以自由運動。箝位開關可以改變輸出軸的運動方式,實現箝位過程。
1.2.3 驅動和箝位的動作時序關系
圖3所示為振子與箝位開關的動作時序關系,圖中xc表示箝位開關的變形狀態,正值表示卡緊,負值表示松開。如圖3(a)所示,在t0時刻,當振子從平衡位置向y方向擺動時,卡緊的箝位開關準備打開,此時輸出軸的速度v2和位移y2均為零;在t0至t1時間段,箝位開關打開(如圖3(b)所示),根據動量守恒定律及輸出軸的受力方向知,輸出軸沿y方向運動,速度先增大后減小,位移沿y方向增加。速度v2和位移y2如下:

根據動量守恒定律知,當振子擺動到與t0時刻的位置關于平衡位置對稱(圖3(b)中的虛實線所示)時,如圖3(c)的t1時刻所示,輸出軸的速度減小為零,位移達到y方向最大值,為了防止輸出軸反向(-y方向)運動,此時箝位開關迅速卡緊,t1如下:

在t1至t2時間段內(如圖3(d)所示),箝位開關保持卡緊狀態不變,振子沿y方向擺到初始位置,輸出軸靜止不動,t2即為下一個周期的起始點。以上四步組成一個典型的運動周期,輸出軸由此產生一個y方向的微小步距δs:

經過一個周期,輸出軸已沿y方向移動一個步距,如此重復,可使輸出軸沿y方向持續運動。
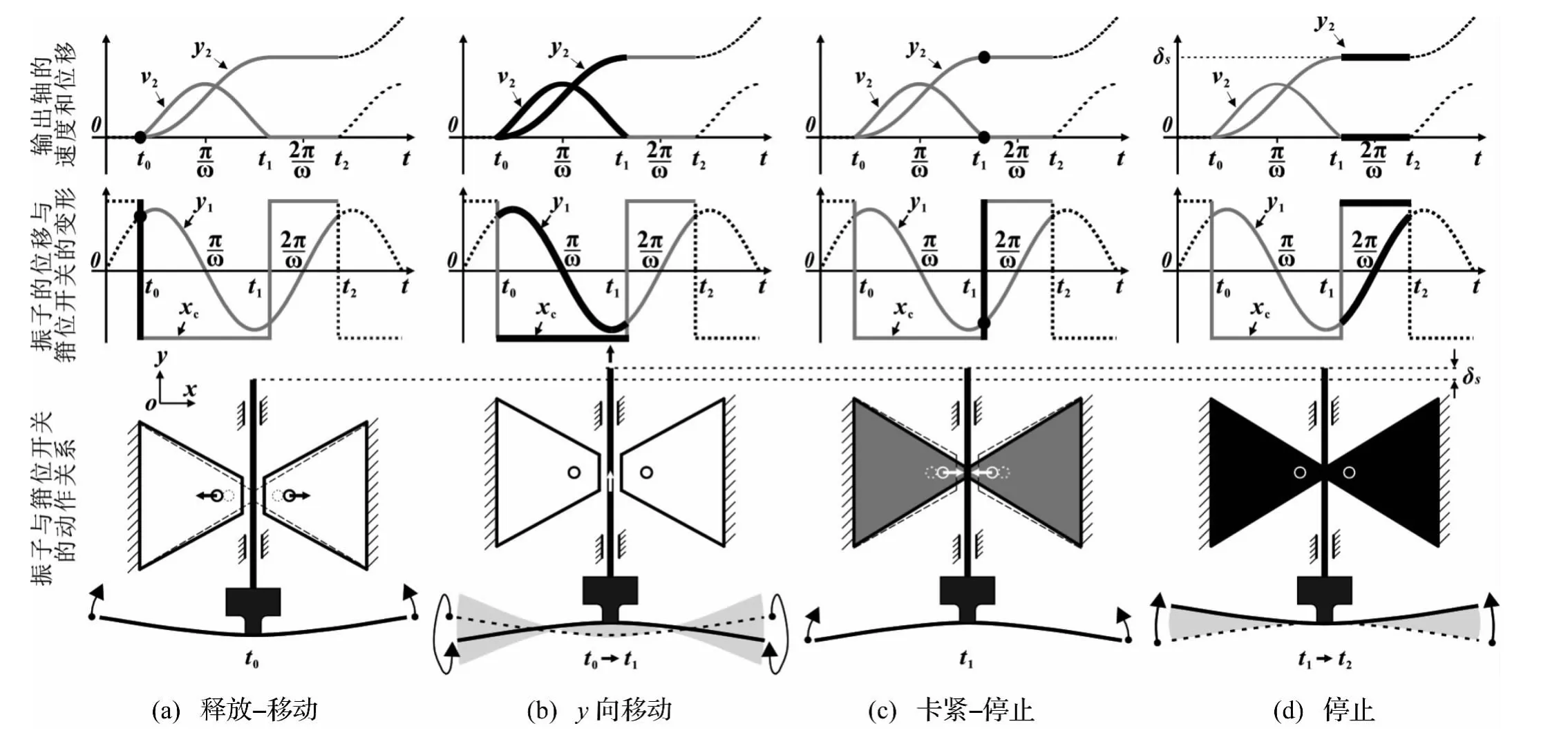
圖3 同步箝位控制壓電馬達工作過程Fig.3 Working cycle of the piezomotor
由上述分析可知,同步箝位控制壓電馬達工作時:①不考慮負載時,箝位開關在0到π/ω時間段內任意時刻松開,馬達可實現y方向運動;箝位開關在π/ω到2π/ω時間段內任意時刻松開,馬達可實現-y方向的運動。②為避免沖擊與滑動摩擦,箝位開關必須在輸出軸的速度為零時迅速卡緊。③ 改變箝位的占空比(箝位開關松開時間與整個工作周期時間的比例)以及改變振子的振動幅度(彈簧的變形量δ),能夠調節馬達的步距大小。④改變箝位開關的占空比,能夠調節馬達的宏觀速度大小。⑤考慮負載以及摩擦時,箝位開關應該在驅動力F大于負載力和摩擦力總和f時松開,得到在負載和摩擦力下的速度、位移、箝位時刻點以及步距的表達式(12)~(15)。

2 ANSYS仿真設計
為驗證理論分析的可行性以及選擇合適的結構尺寸,利用有限元仿真軟件ANSYS 13.0對驅動振子和箝位開關進行了仿真設計,模型結構及物理參數如表1所示。
2.1 振子模態分析
圖4為振子的一階共振模態仿真結果,由圖知懸臂梁的一階橫向彎曲振動帶動輸出軸做往復直線運動,該模型的一階共振頻率是170 Hz,振子的等效質量m1為 3.2 g,輸出軸的等效質量 m2為 25.6 g,等效彈簧剛度k為3 242 N/m。模態仿真結果驗證了驅動結構設計的可行性。

圖4 振子一階共振模態的ANSYS仿真Fig.4 First transverse natural vibration of the vibrator from the finite element modal analysis in ANSYS
2.2 箝位開關準靜態、模態分析
圖5 是箝位開關準靜態仿真的結果,由結果知箝位開關能夠實現卡緊和松開功能,另外從模態分析仿真結果知箝位開關的一階共振頻率是9.8 kHz,箝位開關的共振頻率遠離振子的一階共振頻率170 Hz。壓電馬達工作時,箝位開關能夠工作在準靜態下,不會被激發出不必要的共振模態,驗證了箝位結構設計的可行性。
3 實驗測試與分析
3.1 實驗裝置

圖5 箝位開關的ANSYS準靜態仿真Fig.5 Quasi-static analysis of the clutch in ANSYS
圖6 所示為同步箝位控制壓電馬達實驗裝置。信號發生器(Rigol DG1022)通道1輸出正弦波電壓經電壓放大器1(Apex PA94)放大80倍激勵振子;信號發生器通道2輸出同頻方波經電壓放大器2(Trek PA05039)放大200倍驅動箝位開關;數字示波器(Rigol DS 5022M)監測上述兩個同步信號。激光多普勒測速儀(Neoark Corp.MLD-221,Japan)測試輸出軸的步進運動特性。激光位移傳感器(optoNCDT 1401-5)測試輸出軸在不同負載和占空比下的速度特性。壓電馬達的結構組成如圖1(a)所示,實物圖如圖6右下角所示,主要結構參數如表1所示。
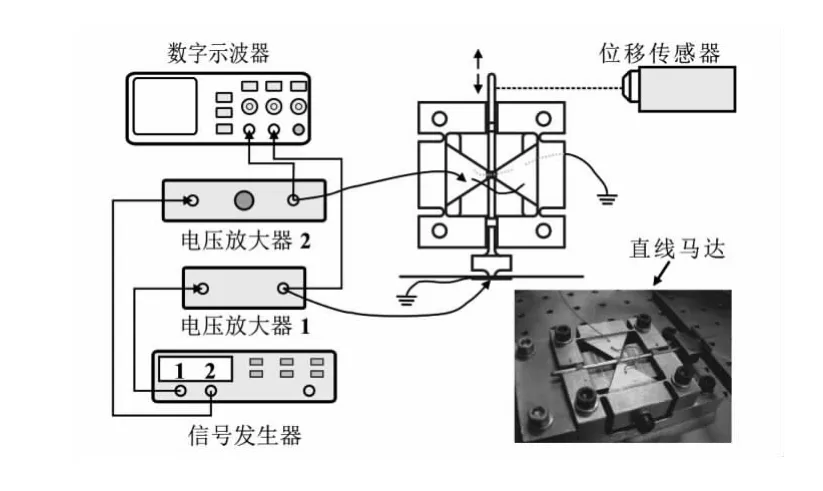
圖6 步進運動測試實驗裝置Fig.6 Measurement system for the stepping characteristics
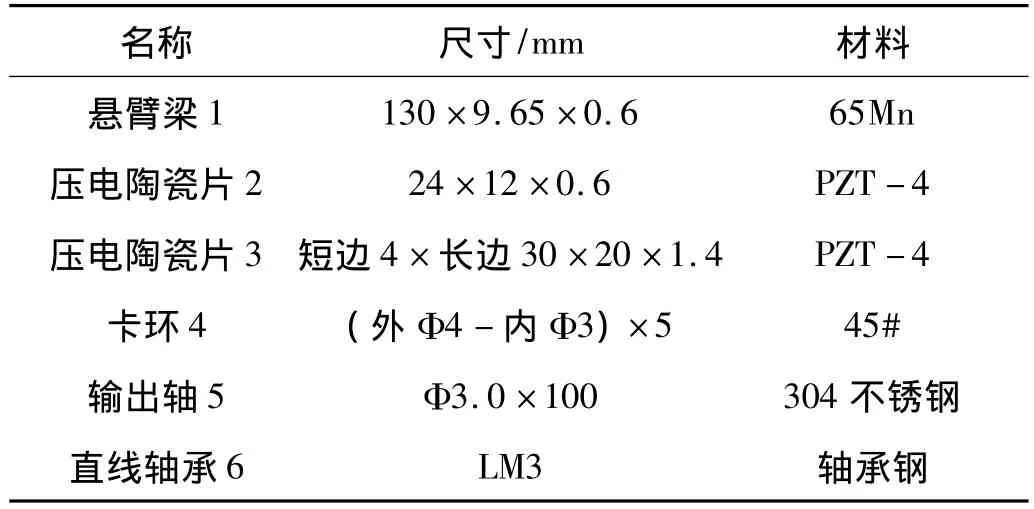
表1 主要結構參數Tab.1 Main structure parameters
3.2 實驗結果及分析
3.2.1 箝位開關和振子特性
因為箝位開關工作在準靜態下,所以當壓電馬達工作時箝位開關不能被激發出共振模態,箝位開關的任何階共振頻率都要遠離振子的共振頻率。由圖7箝位開關和振子的導納曲線知,箝位開關的一階共振頻率為4737 Hz,振子的一階共振頻率(壓電馬達的工作頻率)為160 Hz。

圖7 動態特性Fig.7 Vibration characteristics
實驗測試結果表明箝位開關的一階共振頻率遠遠大于振子的一階共振頻率,與ANSYS仿真吻合較好,設計符合要求。
3.2.2 運動特性
圖8所示為壓電馬達的無負載步進運動特性。圖中驅動激勵信號為80 Vp-p正弦波,頻率160 Hz;箝位激勵信號為2 kVp-p方波,頻率160 Hz,占空比60%。當信號發生器輸出的正弦波信號相位超前方波信號130°時(圖8(a)),正向運動步距大約是5μm(如圖8(c)所示)。當驅動信號相位超前310°時,馬達可獲得幾乎相等步距的反方向運動,如圖8(b)和(d)所示。
由圖8知,通過調節驅動與控制信號,壓電馬達能夠平穩運動,并且通過調節振子與箝位開關兩者驅動信號的相位關系,能夠方便實現壓電馬達的雙向可控運動。

圖8 步進運動特性Fig.8 Characteristics of the stepping movements
圖9 所示為壓電馬達的負載特性。當負載為5 N、初始占空比為20%,振子位移相位超前箝位位移相位約60°時,壓電馬達運動狀態平穩,此時馬達的速度為0.32mm/s。保持上述參數不變,逐漸增加占空比,當占空比增加到30%時,5 N的負載狀態下馬達幾乎無運動。依此方法,另外分別測試了4 N、3 N、2 N負載下、振子與箝位位移不同相位關系時的負載特性。

圖9 不同負載時速度與占空比函數關系Fig.9 Velocity with different loads and duty cycles
從圖9知,馬達在大負載下僅能在較小的占空比下運動,釋放時刻驅動力較大;馬達承受較輕負載時能在較大的占空比范圍內運動,釋放時刻驅動力較小。
3.2.3 效率
圖10所示為負載從0.5 N增加到5 N時,測得的馬達的速度、輸入功率以及效率。由圖可知,隨著負載的增加,馬達的速度從8.2 mm/s減小到0.1 mm/s;效率在負載為2 N時達到最大值18.5%;輸入功率變化較小,在負載是1N的時候達到最大值48.2 mW。箝位開關上的功率消耗幾乎不變,約0.7 mW。
隨著負載的增加,馬達的速度迅速減小,輸入功率變化很小,當速度幾乎為零時,輸入功率仍然保持很高。因為箝位開關上的功率損耗非常小,幾乎可以忽略,所以振子消耗在空氣中的功率很大。由實驗知,當輸出軸固定不動(馬達不工作沒有功率輸出),激勵振子使其振幅與正常工作時等大,測出振子的消耗功率最高占總功率的54%。后續研究中,振子結構可以進一步優化,消除或減小消耗在空氣中的功率損耗,馬達的效率會進一步大幅提高。
4 結論
在對目前壓電馬達存在的一些問題分析研究的基礎上,提出了一種新的同步箝位控制壓電馬達工作模式,該馬達具有以下幾個優點。①能量傳輸效率高。箝位開關卡緊時位移為零,松開時力為零,理論上箝位開關功率損耗始終為零,實驗測試證明實際功率消耗幾乎為零。②使用壽命長。卡緊時,箝位開關與輸出軸無相對滑動;松開時兩者不接觸。該壓電馬達始終不存在滑動摩擦。③精密位置控制。該壓電馬達的步距能夠在零和最大步距之間任意調節,可應用于精密位置控制。
通過對原理樣機的實驗測試知:負載是0.5 N時樣機的速度達到8.2 mm/s;最大負載能力達到5 N;總效率達到18.5%,凈效率達到72.5%,實驗結果表明該種壓電馬達具有良好的性能。經過對振子機構的進一步優化設計以及添加力和速度傳感器精確控制箝位開關開啟和關閉時刻點,可使該種馬達在力、速度、效率得到大幅提高。該研究是對提高壓電馬達的綜合性能、尤其是解決壓電馬達使用壽命問題的有益探索,對拓展壓電馬達的研究思路具有重要意義。
[1]李向華,陳 超,趙淳生.非接觸式直線型超聲電機的振動分析[J].振動與沖擊,2010,29(7):149-152.LI Xiang-hua,CHEN Chao,ZHAO Chun-sheng.Vibration analysis of non-contact linear ultrasonic motor[J].Journal of Vibration and Shock,2010,29(7):149-152.
[2]張健滔,朱 華,趙淳生.行波型桿式超聲電機定子的參數化有限元法優化設計[J].振動與沖擊,2009,28(7):122-125,152.ZHANG Jian-tao,ZHU Hua,ZHAO Chun-sheng.FEM-based parametric optimum design of a traveling-wave type barlike ultrasonic motor stator[J].Journal of Vibration and Shock,2009,28(7):122 -125,152.
[3]王金鵬,金家楣,趙淳生.用于精密定位平臺的直線超聲電機的異步并聯[J].光學精密工程,2011,19(11):2693-2702.WANG Jin-peng, JIN Jia-mei, ZHAO Chun-sheng.Asynchronous bundling of linear ultrasonic motor for precision positioning stage[J].Opt.Precision Eng.,2011,19(11):2693-2702.
[4] Park S H,Agraz J,Tuncdemir S,et al.Delta-shaped piezoelectric ultrasonic motor for two-dimensional positioning[J].Japanese Journal of Applied Physics,2008 47(1):313-318.
[5]Spanner K.Survey of the various operating principles of ultrasonic piezomotors[C].Presented at the Actuator 2006,10th International Conference on New Actuators,Bremen Germany,2006,414-421.
[6] Frank J,Koopmann G H,Chen W,et al.Design and performance of a high force piezoelectric inchworm motor[J].Smart Structures and Materials 1999:Smart Structures and Integrated Systems,Pts 1 and 2,1999,3668:717-723.
[7]Oh,C H,Choi JH,Nam,H J,et al.Ultra-compact,zeropower magnetic latching piezoelectric inchworm motor with integrated position sensor[J].Sensors and Actuators a-Physical,2010,158(2):306 -312.
[8] Morita T,Yoshida R,Okamoto Y,et al.A smooth impact rotation motor using a multi-layered torsional piezoelectric actuator[J].IEEE Transactions on Ultrasonics Ferroelectrics and Frequency Control,1999,46(6):1439 -1445.
[9]Duan Z Y,Wang QK.Development of a novel high precision piezoelectric linear stepper actuator[J]. Sensors and Actuators A-Physical,2005,118(2):285 -291.
[10]張健滔,金家楣,趙淳生.新型多自由度圓環形駐波超聲電機[J].振動與沖擊,2011,30(12):223 -225,240.ZHANG Jian-tao,JIN Jia-mei,ZHAO Chun-sheng.Novel multi-DOF ring-shaped standing-wave type of ultrasonic motor[J].Journal of Vibration and Shock,2011,30(12):223 -225,240.
[11] Liu Y X,Chen W S,Liu J K,et al.A cylindrical standing wave ultrasonic motor using bending vibration transducer[J].Ultrasonics,2011,51(5):527-531.
[12]金家楣,泮振鋒,錢 富.階梯圓柱形壓電振子直線型超聲電機[J].振動、測試與診斷,2011,31(6):715 -719.JIN Jia-mei,PAN Zhen-feng,QIAN Fu.Stepped cylindrical piezoelectric vibrator linear ultrasonic motor[J].Journal of Vibration,Measurement& Diagnosis,2011,31(6):715-719.
[13] Watson B,Friend J,Yeo L.Piezoelectric ultrasonic resonant motor with stator diameter less than 250μm:the Proteus motor[J].Journal of Micromechanics and Microengineering,2009,19(2):022001(5pp).
[14]Zhang Q,Pan CL,Ma Y T,et al.Piezoelectric rotary motor based on active bulk torsional element with grooved helical electrodes[J].IEEE-Asme Transactions on Mechatronics,2012,17(2):260-268.
[15] Hii K F,Vallance R R,Menguc M P.Design,operation,and motion characteristics of a precise piezoelectric linear motor[J].Precision Engineering,2010,34(2):231-241.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06