從準(zhǔn)確、精確到精益求精
——載人航天推動(dòng)運(yùn)載火箭制導(dǎo)方法的發(fā)展
2013-05-14 13:00:05宋征宇
航天控制 2013年1期
關(guān)鍵詞:發(fā)動(dòng)機(jī)方法
宋征宇
北京航天自動(dòng)控制研究所,北京 100854
運(yùn)載火箭制導(dǎo)系統(tǒng)的任務(wù)是將有效載荷準(zhǔn)確送入預(yù)定軌道。通常所說的制導(dǎo)實(shí)際包含了導(dǎo)航和制導(dǎo)兩部分功能。火箭的入軌誤差一般分為制導(dǎo)誤差和非制導(dǎo)誤差。制導(dǎo)誤差又分為方法誤差和工具誤差①,前者主要指導(dǎo)航功能誤差,慣性器件精度是其主要部分;后者主要指制導(dǎo)算法產(chǎn)生的誤差。非制導(dǎo)誤差是外部因素決定的誤差,如發(fā)動(dòng)機(jī)后效偏差、地面瞄準(zhǔn)系統(tǒng)偏差等產(chǎn)生的誤差,所占比例較小。
由于在很長一段時(shí)間里決定精度的主要因素是工具誤差,所以火箭制導(dǎo)方法發(fā)展較為緩慢。隨著技術(shù)的發(fā)展和要求的提高,降低工具誤差的措施不斷得到應(yīng)用,如陀螺儀精度逐漸提高,以及采用衛(wèi)星組合導(dǎo)航等,使得方法誤差逐漸凸顯出來。圖1與圖2是采用組合導(dǎo)航技術(shù)前后各類誤差的分布情況。

圖1 未采用組合導(dǎo)航

圖2 采用組合導(dǎo)航
多年來我國運(yùn)載火箭一直采用攝動(dòng)制導(dǎo)方法,基本滿足了準(zhǔn)確入軌的要求。在交會(huì)對接等任務(wù)需求高精度入軌、且工具誤差大幅降低后,從任務(wù)的總精度要求來看,如采用攝動(dòng)制導(dǎo)方法,僅方法誤差就已超出指標(biāo)要求,于是在多年迭代制導(dǎo)研究的基礎(chǔ)上[1-2],該項(xiàng)技術(shù)在我國載人運(yùn)載火箭上首次得到了具體應(yīng)用。
1 國內(nèi)外運(yùn)載火箭制導(dǎo)方法的發(fā)展
運(yùn)載火箭在大氣內(nèi)的上升段制導(dǎo)均采用開環(huán)控制,原因是在大氣層內(nèi)約束較多,如氣動(dòng)載荷約束、一級殘骸落點(diǎn)約束等,閉環(huán)制導(dǎo)的實(shí)施難度較大,同時(shí)大氣層內(nèi)飛行段制導(dǎo)的準(zhǔn)確性對火箭最終入軌精度影響并不大,雖然國內(nèi)外一些研究機(jī)構(gòu)也開展了大氣層內(nèi)上升段制導(dǎo)方法的研究,但一直沒有得到工程應(yīng)用,研究的重點(diǎn)集中在真空段制導(dǎo)。
1.1 國外制導(dǎo)方法的發(fā)展
國外運(yùn)載火箭真空段制導(dǎo)早期采用跟蹤標(biāo)準(zhǔn)飛行軌跡的制導(dǎo)方法,在美國阿波羅計(jì)劃中,根據(jù)任務(wù)需求為土星5火箭[3]研制了路線自適應(yīng)制導(dǎo)方法,這是一種采用多項(xiàng)式擬合的方法,也是首次應(yīng)用于運(yùn)載火箭的自適應(yīng)制導(dǎo)方法。在經(jīng)過數(shù)次飛行之后,土星5火箭改用了更為先進(jìn)的迭代制導(dǎo)方法(IGM),它是一種以燃料消耗最少為性能指標(biāo)的最優(yōu)控制方法,與多項(xiàng)式制導(dǎo)相比,迭代制導(dǎo)所需的飛行前計(jì)算的工作量小,能更好地適應(yīng)任務(wù)和飛行器的變化。在航天飛機(jī)[4]任務(wù)中,對迭代制導(dǎo)方法又進(jìn)行了優(yōu)化,從平面二維制導(dǎo)擴(kuò)展為空間三維制導(dǎo),同時(shí)增加了多種故障處理中斷模式,發(fā)展成為Powered Explicit Guidance(PEG) 。國外一些學(xué)者將土星5火箭的迭代制導(dǎo)方法稱作第一代閉環(huán)最優(yōu)制導(dǎo)方法,將PEG稱為第二代,目前正在研究的多目標(biāo)優(yōu)化制導(dǎo)方法被稱作第三代。
在此期間,俄羅斯和歐洲的運(yùn)載火箭也先后發(fā)展出各自的自適應(yīng)制導(dǎo)方法。
閉環(huán)制導(dǎo)具有很強(qiáng)的適應(yīng)性,尤其在發(fā)動(dòng)機(jī)故障的情況下,制導(dǎo)系統(tǒng)能重新規(guī)劃飛行軌跡。在2012年10月,美國連續(xù)發(fā)生了兩起火箭發(fā)射中發(fā)動(dòng)機(jī)故障的情況,均因制導(dǎo)控制系統(tǒng)的上述能力使得任務(wù)仍能完成。同年10月7日,空間探索技術(shù)(SpaceX)公司的法爾肯9火箭發(fā)射龍飛船,在火箭飛行約79s后,火箭一級一臺(tái)發(fā)動(dòng)機(jī)異常,隨后發(fā)動(dòng)機(jī)關(guān)機(jī)。為保護(hù)其他發(fā)動(dòng)機(jī),發(fā)動(dòng)機(jī)艙開始釋放壓力,其他8臺(tái)發(fā)動(dòng)機(jī)工作正常。“按照事先的設(shè)計(jì),飛行計(jì)算機(jī)實(shí)時(shí)地重新計(jì)算出了新的上升軌跡(ascent profile),確保龍飛船進(jìn)入軌道”[5]。同年10月4日,Delta 4發(fā)射GPS衛(wèi)星(2F-3),上面級發(fā)動(dòng)機(jī)(RL-10)推力異常下降,“但火箭的制導(dǎo)系統(tǒng)和飛行計(jì)算機(jī)對推力降低進(jìn)行了補(bǔ)償”[6],在剩余燃料的幫助下將衛(wèi)星送入軌道。
1.2 國內(nèi)制導(dǎo)方法的發(fā)展
國內(nèi)火箭長期采用跟蹤標(biāo)準(zhǔn)彈道的攝動(dòng)制導(dǎo)方法,這是一種將目標(biāo)函數(shù)在標(biāo)準(zhǔn)彈道附近泰勒展開,通過將目標(biāo)函數(shù)與理論值的偏差控制為0,達(dá)到滿足最終軌道根數(shù)要求的方法。攝動(dòng)制導(dǎo)也從隱式導(dǎo)航到顯式導(dǎo)航不斷發(fā)展完善,滿足了準(zhǔn)確入軌的基本要求。攝動(dòng)制導(dǎo)是一種偏差反饋控制,影響攝動(dòng)制導(dǎo)精度提高的主要因素有以下幾個(gè)方面。
1)導(dǎo)引量取決于導(dǎo)引系數(shù),如導(dǎo)引系數(shù)采用某個(gè)參數(shù)的偏導(dǎo)數(shù),則該參數(shù)會(huì)控制得非常好,入軌時(shí)該參數(shù)會(huì)有很高的精度,而其它參數(shù)的精度則相對差一些。因此,在導(dǎo)引系數(shù)設(shè)計(jì)時(shí)必須對重要參數(shù)、控制精度較為緊張的參數(shù)優(yōu)先進(jìn)行導(dǎo)引,如要精確控制多個(gè)參數(shù)難度較大;
2)攝動(dòng)制導(dǎo)方法基于一階泰勒展開,如考慮高階項(xiàng)則復(fù)雜性明顯提高,適用于高階項(xiàng)可忽略的情況,所以干擾不能太大,應(yīng)在線性范圍內(nèi),否則導(dǎo)引精度下降;
3)泰勒展開點(diǎn)一般都選在關(guān)機(jī)點(diǎn)處,當(dāng)彈道上不同點(diǎn)的一階偏導(dǎo)數(shù)變化較大時(shí)不利于提高導(dǎo)引效果,即認(rèn)為只有在彈道平穩(wěn)的情況下,關(guān)機(jī)點(diǎn)的偏導(dǎo)數(shù)才能代表其它點(diǎn)的偏導(dǎo)數(shù)。
隨著交會(huì)對接任務(wù),我國首先在載人運(yùn)載火箭上采用了迭代制導(dǎo)方法,考慮了球面引力場和三維制導(dǎo),我國現(xiàn)役的其他火箭仍采用攝動(dòng)制導(dǎo),而新一代運(yùn)載火箭都將采用迭代制導(dǎo)方法。
2 迭代制導(dǎo)的應(yīng)用及其效果
2.1 迭代制導(dǎo)的主要原理
迭代法是一種逐步逼近的方法,它是求解代數(shù)方程、超越方程、微分方程時(shí)常用的一種基本而重要的數(shù)值方法,因其主要通過迭代不斷求解最佳入軌點(diǎn)以及最優(yōu)彈道,故被稱作迭代制導(dǎo)方法。
迭代制導(dǎo)采用的性能指標(biāo)為燃料消耗最少[1],因發(fā)動(dòng)機(jī)推力和秒耗量基本固定,因此可表述為:
(1)
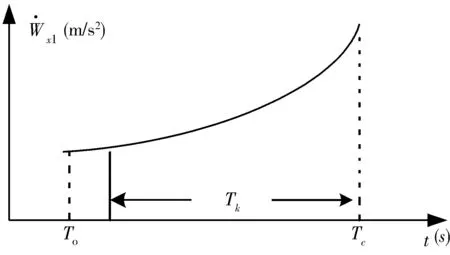
根據(jù)推力矢量方向(由箭體姿態(tài)決定),經(jīng)數(shù)值積分可以估算出飛行過程中產(chǎn)生的速度、位置量。如果能將推力方向表示為一簡單的函數(shù)形式(根據(jù)上升段軌道設(shè)計(jì)經(jīng)驗(yàn)而總結(jié)出的規(guī)律,火箭最佳推力方向變化基本呈線性),則數(shù)值積分可以簡化為相對簡單的估算公式,從而實(shí)現(xiàn)箭上快速計(jì)算。
(2)
(3)
(4)

(5)
2.2 載人運(yùn)載火箭迭代制導(dǎo)特點(diǎn)
1)通過對火箭后續(xù)能力的估算,在目標(biāo)軌道上尋找最優(yōu)的入軌點(diǎn),而不是定點(diǎn)入軌,這一點(diǎn)可使入軌時(shí)速度與位置更加匹配,在發(fā)動(dòng)機(jī)推力不可調(diào)的情況下對提高入軌精度有很大的幫助;
2)確立了基于等效近地點(diǎn)幅角(緯度幅角)估算入軌點(diǎn)的方法,算法簡單,效果良好;
3)采用雙向逼近的方法求解剩余飛行時(shí)間,即同時(shí)計(jì)算飛行彈道和目標(biāo)軌道對剩余飛行時(shí)間的偏導(dǎo)數(shù),同步逼近、達(dá)到快速收斂效果;
4)采用接力形式的全程尋優(yōu)算法,一級攝動(dòng)制導(dǎo)確保殘骸落區(qū),二級主機(jī)迭代、二級游機(jī)迭代,增大火箭的修偏和機(jī)動(dòng)能力,全程尋優(yōu)算法確保了燃料消耗最少;

6)在確保算法收斂性方面采取了大量安全性設(shè)計(jì)措施,包括關(guān)鍵數(shù)據(jù)濾波、限幅等常規(guī)措施,以及快速過載判斷等手段,實(shí)現(xiàn)了迭代制導(dǎo)工程化。
2.3 迭代制導(dǎo)應(yīng)用效果
2.3.1 提高入軌精度
表1列出了不同制導(dǎo)方案、制導(dǎo)方法的入軌精度(考慮了所有干擾和誤差的總計(jì)),從表中可以看出,即使在采用了衛(wèi)星組合導(dǎo)航的情況下,迭代制導(dǎo)對精度仍有較大的提升。

表1 不同制導(dǎo)方案與方法的精度對比
表2列出了攝動(dòng)制導(dǎo)與迭代制導(dǎo)在無干擾以及典型干擾條件下精度的對比(僅列出部分方法誤差的統(tǒng)計(jì)數(shù)據(jù)):在無干擾情況下,攝動(dòng)制導(dǎo)也具有較高的精度;在干擾條件下精度受到影響。從中也可以看出影響攝動(dòng)制導(dǎo)精度的主要因素。

表2 攝動(dòng)制導(dǎo)與迭代制導(dǎo)精度對比
2.3.2 對發(fā)動(dòng)機(jī)故障有較強(qiáng)適應(yīng)性
迭代制導(dǎo)方法根據(jù)實(shí)時(shí)測量到的火箭加速度進(jìn)行簡化積分,并估算入軌點(diǎn),對發(fā)動(dòng)機(jī)推力變化非常敏感,當(dāng)發(fā)動(dòng)機(jī)推力變化以后,它能夠重新規(guī)劃出一條新的最優(yōu)彈道。經(jīng)數(shù)學(xué)仿真,迭代制導(dǎo)能夠適應(yīng)較大程度、多種形式的發(fā)動(dòng)機(jī)推力異常:
1)接入時(shí)刻初值偏差仿真,如一級所有發(fā)動(dòng)機(jī)秒流量偏差(最大-8%),助推器I,III或II,IV中各有一臺(tái)推力為0等;
2)二級主機(jī)故障仿真,秒流量下降(最大20%),比沖下降(最大20%),關(guān)機(jī)前下降(50%),隨機(jī)下降(發(fā)生時(shí)刻隨機(jī);持續(xù)時(shí)間隨機(jī),最大100s;下降幅度隨機(jī),最大30%);
3)二級游機(jī)故障仿真,秒流量下降(最大50%),比沖下降(最大50%),關(guān)機(jī)前下降(50%),隨機(jī)下降(發(fā)生時(shí)刻隨機(jī);持續(xù)時(shí)間隨機(jī),最大30s;下降幅度隨機(jī),最大30%);
4)過載測量誤差,慣組測量結(jié)果是實(shí)測結(jié)果的50%~150%(僅指迭代制導(dǎo)算法的輸入數(shù)據(jù)不準(zhǔn)確,導(dǎo)航結(jié)果由組合導(dǎo)航保證)。
在上述情況下,算法均收斂(即使發(fā)動(dòng)機(jī)比沖發(fā)生變化,僅影響關(guān)機(jī)時(shí)間的預(yù)測和飛行程序角,不影響算法的收斂性,因?yàn)槊總€(gè)周期都要從當(dāng)前點(diǎn)重新規(guī)劃和修正),且只要運(yùn)載能力具備,入軌精度滿足要求。為進(jìn)一步說明問題,假設(shè)載人運(yùn)載火箭在79s一級發(fā)動(dòng)機(jī)中的一分機(jī)發(fā)生故障導(dǎo)致關(guān)機(jī)(及失去推力),計(jì)算結(jié)果如下:

表3 不同制導(dǎo)方法在一子級一分機(jī)故障下的入軌精度對比
如果俯仰姿態(tài)角采用限幅措施,Δω會(huì)有所超標(biāo);如果取消限幅,精度能夠滿足要求。攝動(dòng)在這種故障情況下誤差大大增加了,雖然最終速度達(dá)到了半長軸關(guān)機(jī)的條件,但導(dǎo)引能力不足以消除位置上的偏差,近地點(diǎn)低了44km,未能進(jìn)入預(yù)定軌道;在空氣阻力等影響下,軌道會(huì)下降得較快。從推進(jìn)劑的剩余量看,迭代制導(dǎo)會(huì)消耗更多的推進(jìn)劑,尤其是氧化劑,比攝動(dòng)多消耗了255.4kg(325.3-69.9),與理論值相比多消耗了291.2kg(361.1-69.9)。但這僅是在發(fā)動(dòng)機(jī)故障下、因彈道重新規(guī)劃而導(dǎo)致推進(jìn)劑消耗增多;多消耗的推進(jìn)劑與故障下仍將有效載荷送入軌道相比,其代價(jià)還是值得的。同時(shí),在發(fā)動(dòng)機(jī)正常情況下,即使有各種干擾,迭代制導(dǎo)消耗的推進(jìn)劑與攝動(dòng)相比,差別基本在25kg以內(nèi),圖3繪制了85種干擾條件下燃燒劑、氧化劑剩余總量的偏差圖。
圖3 無故障飛行不同條件下迭代與攝動(dòng)燃燒劑、氧化劑剩余總量偏差圖
故障下多消耗推進(jìn)劑在美國龍飛船的發(fā)射中也得到了體現(xiàn),由于火箭一級故障,需延長剩余發(fā)動(dòng)機(jī)工作時(shí)間來保證完成空間站補(bǔ)給任務(wù),最終造成火箭二級二次點(diǎn)火燃料余量未達(dá)到NASA安全規(guī)定(NASA要求完成二級二次點(diǎn)火的可靠性需達(dá)99%以上,而此次任務(wù)中僅達(dá)到95%)而放棄了二次點(diǎn)火,其第二有效載荷OG2衛(wèi)星被迫置于203km×323km的軌道上[5],最終墜落回地球。
2.3.3 實(shí)際飛行結(jié)果
我國迭代制導(dǎo)首次應(yīng)用于發(fā)射“神舟八號(hào)”飛船任務(wù),在神九的發(fā)射中也得到了應(yīng)用,其入軌精度也達(dá)到歷史最高水平,實(shí)現(xiàn)了精確入軌。圖4是一期、二期技術(shù)指標(biāo)要求及實(shí)際飛行結(jié)果對比,表4是載人運(yùn)載火箭歷次發(fā)射方法誤差的對比。
圖4 入軌精度對比

軌道參數(shù)偏差Y4Y5Y6Y7T1Y8Y9Δa(m)-2010054119.42.52.4-1.2Δhp(m)20-91064511737.270.71.94Δi(°)0.0070.0160.0010.02-0.000350.0002-0.0003Δω(°)-0.090.66-0.425-0.122-0.1546-0.030.002ΔΩ(°)0.02-0.020.03-0.1030.01140.00090.001
2.4 迭代制導(dǎo)的局限性
迭代制導(dǎo)入軌姿態(tài)散布較大。迭代制導(dǎo)對質(zhì)心運(yùn)動(dòng)的控制需通過火箭姿態(tài)的調(diào)整來實(shí)現(xiàn),當(dāng)干擾增大時(shí),實(shí)際入軌姿態(tài)與理論入軌姿態(tài)有較大偏差。

表5 一期入軌姿態(tài)偏差及實(shí)際值
表6 二期入軌姿態(tài)偏差及實(shí)際值
對于某些在入軌后需要快速定向的有效載荷,將產(chǎn)生一定影響。為此需要研究在精確入軌的同時(shí)如何保證姿態(tài)約束的要求。
3 未來交會(huì)對接任務(wù)制導(dǎo)方法的改進(jìn)
3.1 對零窗口的適應(yīng)性
飛行彈道基本確定的情況下,起飛時(shí)刻決定了軌道的升交點(diǎn)赤經(jīng),因此要 “零窗口”發(fā)射。但這大大增加了對火箭發(fā)射可靠性的要求,出現(xiàn)任何影響后續(xù)流程的問題將很可能導(dǎo)致本次發(fā)射無法實(shí)施。同時(shí)“零窗口”保證的是點(diǎn)火時(shí)刻,距火箭真正起飛時(shí)刻還有一定的隨機(jī)性,也會(huì)引入一定的誤差。
未能按時(shí)起飛主要影響5個(gè)軌道根數(shù)中的升交點(diǎn)赤經(jīng),該參數(shù)在飛行控制的諸元中被轉(zhuǎn)化為升交點(diǎn)經(jīng)度,即起飛時(shí)刻目標(biāo)軌道與地球赤道交點(diǎn)的經(jīng)度。顯然,隨著地球的轉(zhuǎn)動(dòng),目標(biāo)軌道與地球赤道交點(diǎn)的經(jīng)度也在不斷變化。如圖5所示,假設(shè)原定起飛時(shí)刻目標(biāo)軌道的升交點(diǎn)經(jīng)度為Ω1,發(fā)射點(diǎn)的經(jīng)度是Ω0,則可以近似地認(rèn)為飛行過程中要轉(zhuǎn)動(dòng)dΩ=Ω1-Ω0;如果推遲起飛Δt,地球轉(zhuǎn)動(dòng)ωΔt,其中ω為地球自轉(zhuǎn)的角速度,發(fā)射點(diǎn)也轉(zhuǎn)動(dòng)了相同的角度,此時(shí)目標(biāo)軌道的經(jīng)度變?yōu)棣?′=Ω1-ωΔt。但因?yàn)榘l(fā)射點(diǎn)與地球固聯(lián),其經(jīng)度仍為Ω0,此時(shí)按照裝訂的諸元轉(zhuǎn)過dΩ,其經(jīng)度為Ω0+dΩ=Ω0+Ω1-Ω0=Ω1=Ω1′+ωΔt,而Ω1′才是時(shí)間推遲后需要達(dá)到的經(jīng)度,因此誤差為ωΔt。
如果在起飛時(shí)刻利用衛(wèi)星導(dǎo)航系統(tǒng)完成起飛時(shí)間的準(zhǔn)確采集,然后根據(jù)原起飛時(shí)刻確定的目標(biāo)軌道參數(shù)自動(dòng)轉(zhuǎn)換成對應(yīng)實(shí)際起飛時(shí)刻的軌道參數(shù)(其實(shí)僅修正升交點(diǎn)經(jīng)度一個(gè)軌道根數(shù)),采用箭上自主修正制導(dǎo)參數(shù)、生成飛行彈道的方法,將軌道根數(shù)的變化,以及由于起飛時(shí)間偏差造成的軌道面誤差統(tǒng)一消除,從而可以取消“零窗口”的限制。
按照現(xiàn)有的方法,如果推遲24s,即使各種控制誤差均為0,也不能滿足赤經(jīng)0.1°的誤差要求。
采用上述方法,以發(fā)射飛船軌道為例,如果射向不變,僅在二級使用迭代制導(dǎo)修正起飛時(shí)間造成的軌道面變化,可以修正升交點(diǎn)經(jīng)度±2°的變化,相當(dāng)于允許起飛時(shí)間與理論時(shí)間偏差8m,由此增加的燃料消耗大約為480kg;若再增大,按預(yù)定射向發(fā)射將極大地?fù)p失運(yùn)載能力甚至無法實(shí)現(xiàn)。
為解決推進(jìn)劑消耗量大的問題,采用全方位發(fā)射技術(shù)實(shí)現(xiàn)射向變更,不僅增大升交點(diǎn)經(jīng)度的變化范圍,還可以增大對軌道傾角變化的適應(yīng)性(在內(nèi)陸發(fā)射場要考慮運(yùn)載能力和對火箭殘骸落區(qū)的影響)。
圖5 地球自轉(zhuǎn)對入軌精度的影響
3.2 帶姿態(tài)約束的迭代制導(dǎo)方法研究
如果要解決2.4節(jié)提出的姿態(tài)偏差過大問題,可以在主動(dòng)段結(jié)束前停止迭代,利用大推力發(fā)動(dòng)機(jī)(相對于幾十到上百牛的調(diào)姿噴管)進(jìn)行調(diào)姿。
1)根據(jù)迭代制導(dǎo)程序角的變化規(guī)律預(yù)測調(diào)姿初始時(shí)刻姿態(tài);
2)由于調(diào)姿終段的姿態(tài)角是已知的,由此可以預(yù)估調(diào)姿造成的視速度增量;
3)將入軌所需速度增量扣除調(diào)姿所造成的速度增量作為迭代終端所需的速度增量,對飛行程序角進(jìn)行重新規(guī)劃;
4)根據(jù)新的飛行程序角計(jì)算入軌參數(shù)、調(diào)整入軌時(shí)間和入軌點(diǎn),并反饋到第1)步修正調(diào)姿初始時(shí)刻姿態(tài),反復(fù)迭代。
圖6分別仿真了要求終端俯仰姿態(tài)角為-5°和-15° 兩種情況。由于估算出末端調(diào)姿的影響,所以在調(diào)姿之前的飛行段程序角也發(fā)生了相應(yīng)的變化,但變化量不大,最終以期望的姿態(tài)入軌,兩種狀態(tài)下的軌道根數(shù)精度也基本令人滿意。
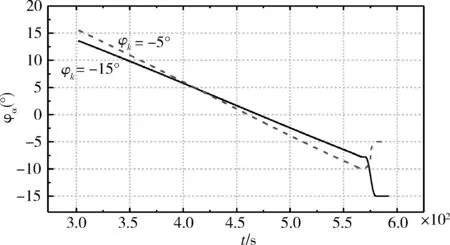
圖6 入軌前增加調(diào)姿段的彈道姿態(tài)角仿真曲線
該方法受到入軌姿態(tài)估計(jì)精度的影響,在距關(guān)機(jī)點(diǎn)較遠(yuǎn)的時(shí)刻,迭代終端姿態(tài)的估計(jì)精度不高,可能會(huì)導(dǎo)致火箭初期并沒有按照最優(yōu)的姿態(tài)飛行,從而造成不必要的燃料損失。同時(shí),預(yù)估調(diào)姿造成的視速度增量需要用到火箭入軌前的視加速度,目前算法中用理論值替代也會(huì)影響一定的精度。
3.3 多終端約束閉路制導(dǎo)的工程化解決方案
姿態(tài)約束只是多終端約束閉路制導(dǎo)的一個(gè)特殊的應(yīng)用。針對這類問題的求解,一般的方法可以分為直接法和間接法2種[7]。間接法的解題思路是:
1)推導(dǎo)出與推力(加速度、速度和位置)相關(guān)的解析表達(dá)式;
2)構(gòu)造或設(shè)計(jì)出與推力、各種約束條件(入軌參數(shù)、姿態(tài)和載荷等)相關(guān)的方程;
3)將推力表達(dá)式代入方程進(jìn)行求解。
第1)步與最優(yōu)控制相關(guān),第3)步與數(shù)值計(jì)算相關(guān),目前第2)步是研究最為活躍的部分。同時(shí),針對不同的需求,推導(dǎo)出的方程也不盡相同,沒有一個(gè)通用的處理方案。
直接法更多地是將這類問題看作純數(shù)學(xué)而非控制問題。如果能夠快速地計(jì)算出每個(gè)節(jié)點(diǎn)火箭需要的速度和加速度,且能夠滿足各種過程約束和終端約束條件,則至少找到了一個(gè)解。雖然有可能不是最優(yōu)解,但在工程上是可接受的。如不滿足要求,采用某種尋優(yōu)的方法對所有節(jié)點(diǎn)控制變量(可能成千上萬)進(jìn)行調(diào)整。這樣的計(jì)算在每個(gè)控制周期內(nèi)迭代進(jìn)行,能不斷修正各種偏差和適應(yīng)包括故障在內(nèi)的各種突發(fā)情況。顯然,直接法計(jì)算量很大,按現(xiàn)有飛行計(jì)算機(jī)的能力是無法在飛行中實(shí)時(shí)解算的。
很顯然可以找到二者結(jié)合的方法,暫且稱作“直接-間接融合算法”,即利用間接法中最優(yōu)控制的結(jié)果來減少求解的變量,然后用直接法對這些變量進(jìn)行求解,在一定運(yùn)算速度和算法的支持下能夠解決此類問題。
例如,假設(shè)推力方向的表達(dá)式如下所示[8-9]:
(6)
λ(τ)共6個(gè)量,前3個(gè)表征推力方向。在已知初值(當(dāng)前值)λ0的情況下,可以計(jì)算出任何時(shí)刻的推力方向,進(jìn)而根據(jù)各點(diǎn)推力方向積分計(jì)算各點(diǎn)速度和位置。 從這里可以看出,因?yàn)楹罄m(xù)任何時(shí)間的狀態(tài)均是由當(dāng)前狀態(tài)決定的,將原本直接法中每個(gè)節(jié)點(diǎn)控制變量的求解轉(zhuǎn)化為一個(gè)節(jié)點(diǎn)(即當(dāng)前周期)的求解,使得計(jì)算量急劇縮減;同時(shí)由于當(dāng)前周期能夠調(diào)整的僅是3個(gè)推力方向,受到發(fā)動(dòng)機(jī)擺角限制、箭體因自身慣性導(dǎo)致的轉(zhuǎn)動(dòng)速率的限制等,這3個(gè)量的變化范圍也是受限的,這就限定了尋優(yōu)的范圍,使得問題進(jìn)一步簡化。當(dāng)然,從推力方向轉(zhuǎn)化成速度和位置需要大量的積分運(yùn)算,如果能夠提高積分運(yùn)算速度,將為直接法在實(shí)時(shí)飛行控制中的工程化應(yīng)用帶來可能。
4 結(jié)束語
隨著航天技術(shù)的發(fā)展,運(yùn)載火箭承擔(dān)的任務(wù)呈
現(xiàn)多樣性,應(yīng)重視制導(dǎo)方法的研究。載人航天工程交會(huì)對接任務(wù)促進(jìn)了迭代制導(dǎo)在我國運(yùn)載火箭上的成功應(yīng)用,但對任務(wù)的通用性還不夠,因其推力矢量的表達(dá)形式難以同時(shí)滿足多種附加條件。而同時(shí)要將復(fù)雜的軌跡規(guī)劃過程放到箭上實(shí)現(xiàn),還需要箭上計(jì)算機(jī)水平的快速發(fā)展作為支持。因此制導(dǎo)方法的發(fā)展,離不開型號(hào)牽引和火箭信息技術(shù)整體水平的提升。
注①:某些飛行器采用圖像匹配制導(dǎo)等方法后,工具誤差和方法誤差的定義已與上述不完全相同。
[1] 呂新廣,宋征宇.載人運(yùn)載火箭迭代制導(dǎo)方法應(yīng)用研究[J].載人航天,2009(1):9-14.
[2] 陳新民,余夢倫.迭代制導(dǎo)在運(yùn)載火箭上的應(yīng)用研究[J].宇航學(xué)報(bào),2003(5):484-489.
[3] Walter Haeussermann.Guidance and Control of SATURN Launch Vehicles[J].AIAA Second Annual Meeting.NASA MSFC, AIAA Paper No.65-304, 1965.
[4] R.L.McHenry, et al.Space Shuttle Ascent Guidance, Navigation, and Control[J].Journal of the Astronautical Sciences.1979,27:1-38.
[5] Orbcomm Craft Falls out of Orbit[N].SPACE NEWS,2012,23(40):4.
[6] RL-10 Investigation Delays USAF Spaceplane Mission[J].SPACE NEWS.2012,23(42):8.
[7] 唐國金,羅亞中,雍恩米.航天器軌跡優(yōu)化理論、方法及應(yīng)用[M].科學(xué)出版社,2012.
[8] P.Lu and B.J.Griffin.Rapid Optimal Multiburn Ascent Planning and Guidance.Journal of Guidance, Control, and Dynamics.2008,31:9.
[9] 火箭高精度入軌技術(shù),載人航天空間站工程預(yù)先研究課題結(jié)題報(bào)告[Z].2012.
猜你喜歡
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
汽車與新動(dòng)力(2015年1期)2015-02-27 12:11:01
汽車與新動(dòng)力(2014年2期)2014-02-27 12:10:15
汽車與新動(dòng)力(2013年5期)2013-03-11 16:08:17