自航鋼耙抓斗挖泥船作業(yè)監(jiān)測(cè)系統(tǒng)
2013-05-05 09:47:58馬學(xué)虎
船電技術(shù) 2013年12期
馬學(xué)虎
?
自航鋼耙抓斗挖泥船作業(yè)監(jiān)測(cè)系統(tǒng)
馬學(xué)虎
(武漢金鼎船舶工程設(shè)計(jì)有限公司,武漢 430062)
作業(yè)監(jiān)測(cè)系統(tǒng)是疏浚船舶必不可少設(shè)施,本文對(duì)自航鋼耙抓斗挖泥船作業(yè)監(jiān)測(cè)系統(tǒng)配置及功能作簡(jiǎn)單介紹。
挖泥船 作業(yè)監(jiān)測(cè)系統(tǒng)
0 引言
由武漢金鼎船舶工程設(shè)計(jì)有限公司開(kāi)發(fā)設(shè)計(jì)的具有抓斗挖泥和鋼耙挖泥兩種作業(yè)功能的自航工程船,主要用于長(zhǎng)江上游重慶(九龍坡)至朝天門(mén)河段航道維護(hù)疏浚。重慶主城區(qū)長(zhǎng)江航道十分復(fù)雜,水流速度大,卵石累積性淤積航道,兩岸碼頭和躉船眾多,江底過(guò)江錨鏈密布,縱橫交錯(cuò),不能禁航施工,疏浚工況差。
針對(duì)以上航道狀況,本船艏部設(shè)置鋼耙裝置,艉部設(shè)置抓斗機(jī),設(shè)置鋼樁定位系統(tǒng),使用臺(tái)車(chē)和液壓環(huán)梁升降裝置定樁移樁。
抓斗機(jī)為獨(dú)立工作型,抓斗機(jī)的動(dòng)作及控制由其自帶的柴油機(jī)驅(qū)動(dòng)液壓油泵產(chǎn)生液壓動(dòng)力來(lái)實(shí)現(xiàn)。抓斗機(jī)在艉部抓斗機(jī)室設(shè)有獨(dú)立操縱系統(tǒng),抓斗機(jī)室自帶有完善監(jiān)視其柴油機(jī)及液壓系統(tǒng)等相關(guān)儀表及安全報(bào)警裝置。
臺(tái)車(chē)、液壓環(huán)梁升降裝置、鋼耙由船舶配備液壓泵站提供動(dòng)力。控制裝置設(shè)置在駕駛室,具有移動(dòng)臺(tái)車(chē)前進(jìn)、后退,液壓環(huán)梁升降裝置升降,鋼耙起落功能。
本船總長(zhǎng)52.00 m,型寬14.00 m,型深3.50 m,設(shè)計(jì)吃水2.00 m,結(jié)構(gòu)吃水2.50 m,其總體布置見(jiàn)圖1。
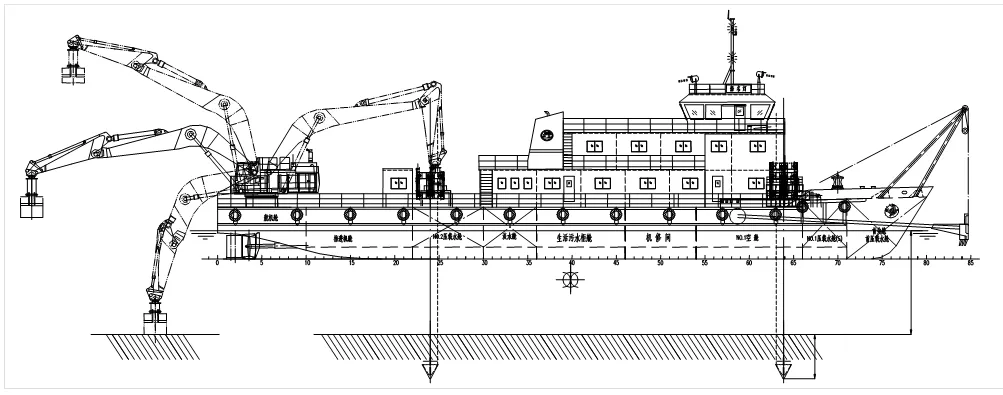
圖1 總體布置圖
根據(jù)本船施工作業(yè)水域特點(diǎn),施工時(shí)需采用錨鏈探測(cè)裝置探明水下錨鏈分布情況,然后采用抓斗機(jī)根據(jù)錨鏈分布情況避開(kāi)錨鏈進(jìn)行疏浚作業(yè)。抓斗機(jī)工作時(shí)采用鋼樁固定,當(dāng)抓斗機(jī)因?yàn)殄^鏈?zhǔn)杩J┕ち粝聹\區(qū)后,再采用鋼耙對(duì)這些少量的淺區(qū)進(jìn)行疏浚以最終滿(mǎn)足需要的航道維護(hù)尺度。
1 作業(yè)監(jiān)測(cè)系統(tǒng)
本船作業(yè)監(jiān)測(cè)系統(tǒng)利用計(jì)算機(jī)對(duì)挖泥船作業(yè)信息進(jìn)行采集和處理,輔助操作人員進(jìn)行疏浚挖泥作業(yè)。
結(jié)合本船施工作業(yè)特點(diǎn),本船作業(yè)監(jiān)測(cè)系統(tǒng)主要包含以下系統(tǒng):
1)水下錨鏈探測(cè)系統(tǒng);
2)雙頻RTK GPS 系統(tǒng);
3)多通道測(cè)深儀系統(tǒng);
4)船舶監(jiān)測(cè)管理系統(tǒng)。
1.1 水下錨鏈探測(cè)系統(tǒng)
水下錨鏈探測(cè)成像原理從理論上講,可用聲、光、磁學(xué)儀器三方面技術(shù)。從利用聲學(xué)儀器理論上講,水下錨鏈外形和河床淤積層中的卵石在圖像上區(qū)分有一定難度。從利用光學(xué)儀器理論上講,由于本船作業(yè)區(qū)域水質(zhì)渾濁,且不可能隨時(shí)派潛水員下水探測(cè),主要難度在于探測(cè)面積太小。
本船錨鏈探測(cè)系統(tǒng)利用磁力學(xué)原理,配備RS-YGB6A型海洋氦光泵磁力儀能滿(mǎn)足要求。海洋氦光泵磁探儀(磁力儀)是一種原子磁力儀,是一種高精度磁異常探測(cè)器,適合于海洋地球物理勘探中高精度磁測(cè)量,也可用于水下小目標(biāo)探測(cè)。該儀器具有數(shù)字化、模塊化、小型化和系統(tǒng)集成特點(diǎn)。用光泵技術(shù)制成的高靈敏度磁探儀,無(wú)零點(diǎn)漂移、不須嚴(yán)格定向,對(duì)周?chē)艌?chǎng)梯度要求不高,可連續(xù)測(cè)量等顯著優(yōu)點(diǎn)。
該儀器由氦光泵水下傳感器、GPS天線(xiàn)、信號(hào)處理器、顯示器、拖纜及GMINFO專(zhuān)用處理軟件等組成(見(jiàn)圖2)。

圖2 海洋氦光泵磁力儀
作業(yè)過(guò)程如下:
1)作業(yè)前用本船拖動(dòng)該裝置對(duì)作業(yè)區(qū)域進(jìn)行探測(cè)(探測(cè)器與本船安全距離約15 m) ;
2)通過(guò)GPS天線(xiàn),對(duì)探測(cè)到河底磁異常數(shù)據(jù),利用GMINFO專(zhuān)用處理軟件,標(biāo)繪出錨鏈具體位置;
3)將錨鏈具體位置信息錄入到本船監(jiān)測(cè)管理系統(tǒng),使本船作業(yè)時(shí)避開(kāi)該區(qū)域。
1.2 雙頻RTK GPS 系統(tǒng)
為了消除系統(tǒng)誤差,提高實(shí)時(shí)動(dòng)態(tài)三維定位精度,本船配備HD-K8型雙頻RTK GPS系統(tǒng)(1+2配置),系統(tǒng)由1套岸上基準(zhǔn)站、2套船舶移動(dòng)站、相關(guān)軟件及附件組成。本系統(tǒng)平面定位精度可達(dá)到厘米級(jí),保證船舶的定位數(shù)據(jù)準(zhǔn)確可靠。
基準(zhǔn)站雙頻GPS天線(xiàn)安裝在岸上已知坐標(biāo)點(diǎn)位置,船舶移動(dòng)站雙頻GPS天線(xiàn)安裝在船舶首尾中心線(xiàn)處。安裝在基準(zhǔn)站上的GPS接收機(jī)進(jìn)行三維定位,解算出基準(zhǔn)站的坐標(biāo),由于存在著軌道誤差、大氣影響以及其他誤差,解算出的坐標(biāo)與基準(zhǔn)站的已知坐標(biāo)是不一樣的,存在誤差。基準(zhǔn)站采用單向點(diǎn)對(duì)點(diǎn)方式將修正數(shù)據(jù)發(fā)送至船舶移動(dòng)站,并且對(duì)其解算的船舶移動(dòng)站坐標(biāo)進(jìn)行修正。最后得到的修正后的移動(dòng)站坐標(biāo)已消去了基準(zhǔn)站和移動(dòng)站的共同誤差,從而提高定位精度。
本系統(tǒng)主要可以輔助完成:
1)船舶初始定位。在作業(yè)起始區(qū)域,可以使船舶的首次定位精確;
2)船舶移船及施工定位。在挖泥的過(guò)程中,為移船及施工定位提供依據(jù)。
3)測(cè)量移船速度。在移船過(guò)程中,為平行移船提供依據(jù)。
4)確定坐標(biāo)點(diǎn)。在測(cè)深儀和計(jì)算機(jī)的配合下,實(shí)時(shí)測(cè)出每一測(cè)深點(diǎn)處坐標(biāo)值,從而為計(jì)算得出較精確的水底地形圖作好數(shù)據(jù)儲(chǔ)備。
1.3 多通道測(cè)深儀系統(tǒng)
挖泥船測(cè)深系統(tǒng)主要用于船舶作業(yè)施工前及竣工時(shí),對(duì)施工作業(yè)區(qū)域水下地貌全面掃側(cè),以檢測(cè)施工質(zhì)量。傳統(tǒng)的單頻率,單換能器測(cè)深儀,只能單線(xiàn)式測(cè)深且覆蓋面較小,在兩條斷面間波束未測(cè)到的河底難免會(huì)漏掉淺點(diǎn)或深坑,給航道行船留下重大隱患。而多波速測(cè)深儀價(jià)格昂貴,維護(hù)保養(yǎng)成本較高,且一般配備在專(zhuān)用航道測(cè)量船上。
本船采用南方測(cè)繪公司HD-9型9通道測(cè)深儀系統(tǒng),由主機(jī)、換能器及連接電纜、數(shù)據(jù)轉(zhuǎn)換盒、打印設(shè)備等組成。系統(tǒng)與雙頻RTK GPS相連接,通過(guò)海洋測(cè)繪成圖軟件可自動(dòng)生成高精度水深圖、水下地形圖及等其它特殊用圖。
9只換能器均勻安裝在船舶尾部底艙沿船寬方向,進(jìn)行全覆蓋無(wú)遺漏掃描和實(shí)時(shí)監(jiān)測(cè),滿(mǎn)足船舶作業(yè)施工檢測(cè)要求。
1.4 船舶監(jiān)測(cè)管理系統(tǒng)
本船船舶監(jiān)測(cè)管理系統(tǒng),是將錨鏈探測(cè)裝置、雙頻RTK GPS、多通道測(cè)深儀、船舶吃水傳感器、船舶姿態(tài)儀、抓斗機(jī)、鋼耙、鋼樁及臺(tái)車(chē)、液壓系統(tǒng)、機(jī)艙重要設(shè)備及各種傳感器提供數(shù)據(jù),通過(guò)計(jì)算機(jī)技術(shù)、網(wǎng)絡(luò)技術(shù)配套專(zhuān)用軟件結(jié)合圖形化管理界面進(jìn)行遠(yuǎn)程監(jiān)測(cè)管理的系統(tǒng)。
其系統(tǒng)結(jié)構(gòu)圖見(jiàn)圖3。
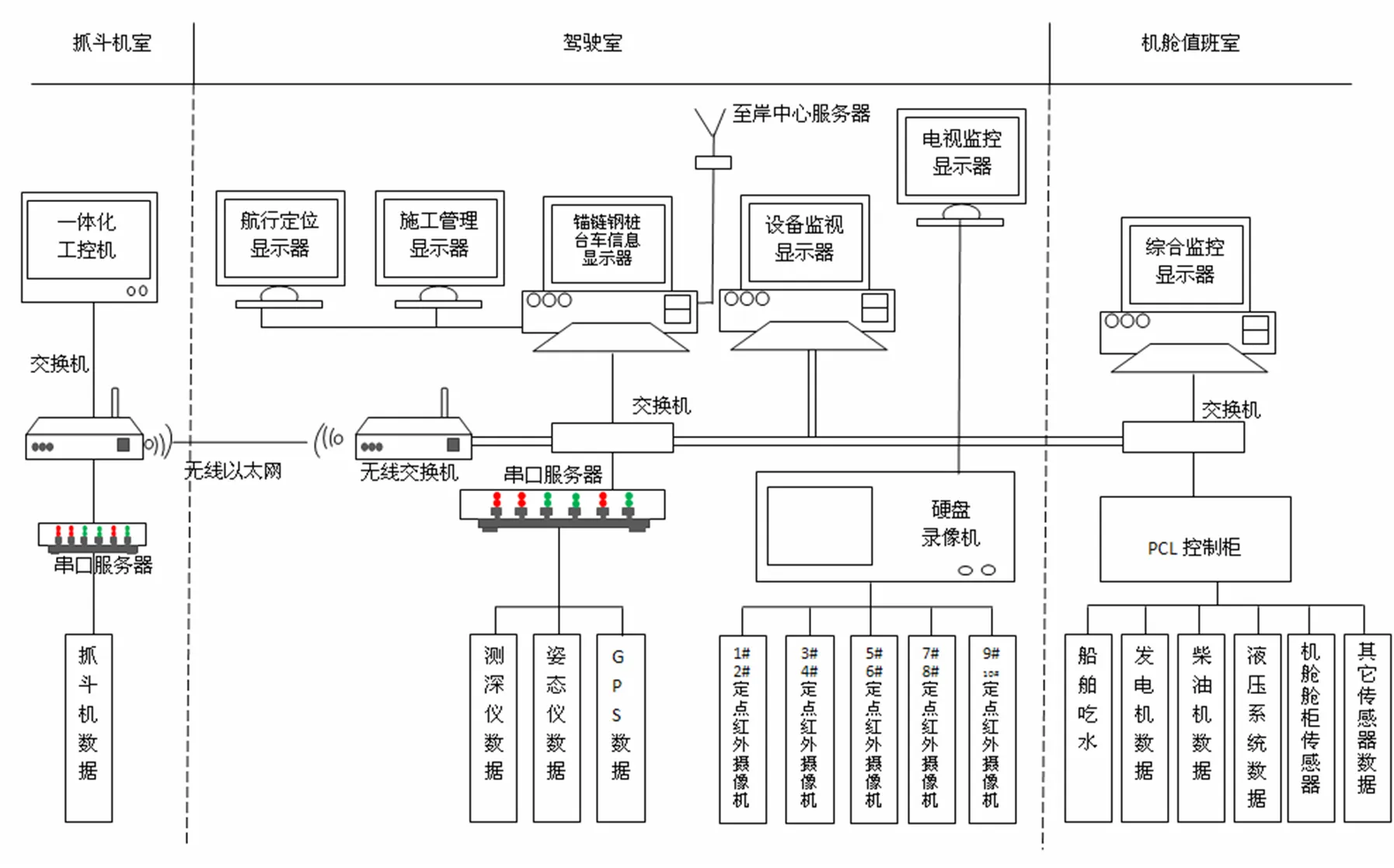
圖3 船舶監(jiān)測(cè)管理系統(tǒng)
1)在抓斗機(jī)室配置一體化工控機(jī)、無(wú)線(xiàn)交換機(jī)、UPS電源等設(shè)備。在顯示界面上,可以顯示當(dāng)前施工設(shè)計(jì)的CAD圖紙、施工區(qū)域測(cè)量水深數(shù)據(jù)、船舶浮態(tài)、船舶吃水、船舶平面位置、抓斗實(shí)時(shí)平面位置、抓斗的實(shí)際施工深度、每斗的施工產(chǎn)量、錨鏈的位置、測(cè)深儀實(shí)時(shí)測(cè)量數(shù)據(jù)、挖槽剖面狀態(tài)信息等。本系統(tǒng)對(duì)抓斗機(jī)室的駕駛員提供精確的施工指導(dǎo),從而保證抓斗精確施工,有效提供施工效率。
2)在駕駛室配置工控機(jī)、顯示器、交換機(jī)、UPS電源、無(wú)線(xiàn)遠(yuǎn)傳設(shè)備等。用于施工管理和定位數(shù)據(jù)、設(shè)備監(jiān)測(cè)數(shù)據(jù)、錨鏈探測(cè)數(shù)據(jù)、鋼耙起落、鋼樁升降、臺(tái)車(chē)移位等數(shù)據(jù)處理及相關(guān)信息顯示。
駕駛室系統(tǒng)部分提供施工定位、施工管理、船舶各類(lèi)數(shù)據(jù)的采集匯總、安全管理、設(shè)備監(jiān)測(cè)等綜合功能,并且利用無(wú)線(xiàn)網(wǎng)絡(luò)技術(shù)將本船的施工數(shù)據(jù)和設(shè)備運(yùn)行數(shù)據(jù)上傳至岸上中心服務(wù)器,中心服務(wù)器利用其所配備的數(shù)據(jù)庫(kù)將船舶端的施工數(shù)據(jù)保存起來(lái),以便工程管理使用。
在駕駛室設(shè)置有視頻監(jiān)視系統(tǒng),在船舶的主要甲板機(jī)械處安裝紅外攝像機(jī),提供對(duì)這些設(shè)備的全天侯視頻監(jiān)視,以滿(mǎn)足全天侯的施工要求。
3)在機(jī)艙值班室配置工控機(jī)、顯示器、交換機(jī)、PLC控制柜等設(shè)備。通過(guò)PLC控制柜采集柴油發(fā)電機(jī)、液壓系統(tǒng)、推進(jìn)電機(jī)等重要設(shè)備及船舶吃水、機(jī)艙艙柜等各類(lèi)傳感器數(shù)據(jù),在機(jī)艙值班室通過(guò)圖形化界面顯示各個(gè)柴油發(fā)電機(jī)組、推進(jìn)電機(jī)、液壓系統(tǒng)等工作的狀態(tài),根據(jù)機(jī)艙內(nèi)各種設(shè)備的報(bào)警閥值自動(dòng)生成報(bào)警,并進(jìn)行記錄和顯示,實(shí)現(xiàn)機(jī)艙綜合監(jiān)控。
抓斗機(jī)室、駕駛室、機(jī)艙值班室三套子系統(tǒng)各自負(fù)責(zé)相應(yīng)的功能,系統(tǒng)之間數(shù)據(jù)通過(guò)以太網(wǎng)或無(wú)線(xiàn)以太網(wǎng)絡(luò)實(shí)現(xiàn)互相通信、數(shù)據(jù)共享。
2 結(jié)論
本挖泥船作業(yè)監(jiān)測(cè)系統(tǒng)配備及應(yīng)用,較大提高了鋼耙抓斗挖泥船施工定位精度、施工作業(yè)效率、施工安全水平、自動(dòng)化程度,同時(shí)實(shí)現(xiàn)船、岸施工管理指令交互,為后續(xù)疏浚船型監(jiān)測(cè)系統(tǒng)研究積累經(jīng)驗(yàn)。
[1] 馬偉明主編. 中國(guó)電氣工程大典·第12卷·船舶電氣工程. 北京: 中國(guó)電力出版社,.2009.
[2] 王谷謙主編. 疏浚工程手冊(cè). 上海: 交通部上海航道局, 1994.
[3] 黃恒祥主編. 船舶設(shè)計(jì)手冊(cè). 北京: 國(guó)防工業(yè)出版社, 1999.
Operation Monitoring System of Self-going Dozen and Grab Bucket Dredger Ship
Ma Xuehu
(Wuhan Jinding Marine Engineering Co., Ltd., Wuhan 430062, China)
U674.31 TP277
A
1003-4862(2013)12-0049-03
2013-05-09
馬學(xué)虎(1981-),男,助理工程師。專(zhuān)業(yè)方向:電氣工程。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
建材發(fā)展導(dǎo)向(2021年9期)2021-07-16 07:11:36
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
故事大王(2016年7期)2016-09-22 17:30:08
中國(guó)房地產(chǎn)業(yè)(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
西安建筑科技大學(xué)學(xué)報(bào)(自然科學(xué)版)(2014年2期)2014-11-12 13:04:54
兒童故事畫(huà)報(bào)(2013年3期)2013-06-24 05:40:30