基于無線傳感系統(tǒng)的斜拉橋索力測試與分析*
2013-04-30 08:59:56毛幸全尚偉昌王開宇張傳杰
傳感技術(shù)學(xué)報 2013年2期
毛幸全,劉 航,喻 言*,尚偉昌,王開宇,張傳杰
(1.大連理工大學(xué)電子科學(xué)與技術(shù)學(xué)院,遼寧大連116024;2.中國人民解放軍63961部隊北京特種機電技術(shù)研究院;3.海洋石油工程股份有限公司,天津300451)
斜拉索是斜拉橋最重要的構(gòu)件,直接承擔(dān)著橋梁荷載,并控制著整個橋面系的內(nèi)力分布和線型。通常斜拉索在錨固區(qū)的高度應(yīng)力集中、腐蝕、疲勞及風(fēng)雨作用下容易引起振動,導(dǎo)致斜拉橋索力的改變,索力是斜拉橋健康狀態(tài)評估的重要指標[1]。因此,對斜拉橋的拉索進行索力檢測和狀態(tài)評估至關(guān)重要。
振動法測索力是目前確定斜拉橋索力最廣泛使用的一種方法[2-3],但是傳統(tǒng)的振動數(shù)據(jù)采集是基于有線通信技術(shù)進行的。這種方法成本較高,而且隨著網(wǎng)絡(luò)規(guī)模的擴大,在一些大跨度的橋梁環(huán)境中,進行有線布置的困難日益突出。
基于此,本文提出基于無線傳感器網(wǎng)絡(luò)的索力識別系統(tǒng)。該系統(tǒng)可以實現(xiàn)在不同環(huán)境下對橋梁振動狀況的實時監(jiān)控,并進行斜拉索的振動基頻識別,同時,利用振動法原理將基頻轉(zhuǎn)換為索力大小。相比較傳統(tǒng)的有線檢測,在保證測試系統(tǒng)穩(wěn)定性、可靠性的同時,為快速方便地檢測索力提供了有效的解決方案。
1 振動法測索力原理
振動法測索力廣泛應(yīng)用于拉索結(jié)構(gòu)的施工控制和健康監(jiān)測中,其原理是基于“弦振動理論”:索拉力與自振頻率之間存在簡單的關(guān)系,即
其中,T是索的拉力,m是索的線密度,l是索的計算長度,fn是索的第n階固有頻率。可以由實測的自振頻率計算得到索力。但弦振動理論沒有考慮拉索的垂度等影響,在很多實際應(yīng)用中將帶來很大的誤差,所以,該理論可用做索力值的大致估算[4-5]。
任偉新等[6]采用索振動的一階位型,用能量法推導(dǎo)出考慮拉索垂度等影響時拉索基頻與索力之間的關(guān)系,同時利用最小二乘法進行曲線擬合來建立通過拉索的基頻計算索力的公式。引入代表垂度等影響的無量綱常數(shù)λ2,得到考慮索垂度和彈性影響的索力實用公式如下:
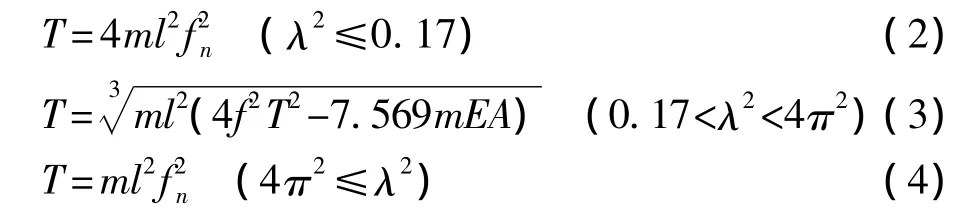
式中f為由振動測試所得的索的基頻,T為所求索力,l為索長,A為橫截面積,m為索的線密度,E為彈性模量,I為截面慣性矩。使用上述公式時,先算出量綱參數(shù)的大致范圍,然后再將基頻值代入相應(yīng)的公式計算。其中

2 基于無線傳感器網(wǎng)絡(luò)的索力測試系統(tǒng)
2.1 無線傳感系統(tǒng)的網(wǎng)絡(luò)拓撲結(jié)構(gòu)概述
無線傳感器網(wǎng)絡(luò)是一種無中心節(jié)點的全分布式系統(tǒng),通過隨機投放的方式,眾多傳感器節(jié)點被密集部署于監(jiān)控區(qū)域[7-8]。
無線傳感器網(wǎng)絡(luò)的拓撲結(jié)構(gòu)通常分為星型拓撲、網(wǎng)狀拓撲和混合型拓撲等[9]。由于星型拓撲結(jié)構(gòu)便于集中控制,同時網(wǎng)絡(luò)延遲時間較小,傳輸誤差較低,所以本文選用星型網(wǎng)絡(luò)拓撲結(jié)構(gòu)進行無線傳感系統(tǒng)的研制,拓撲結(jié)構(gòu)如圖1所示。
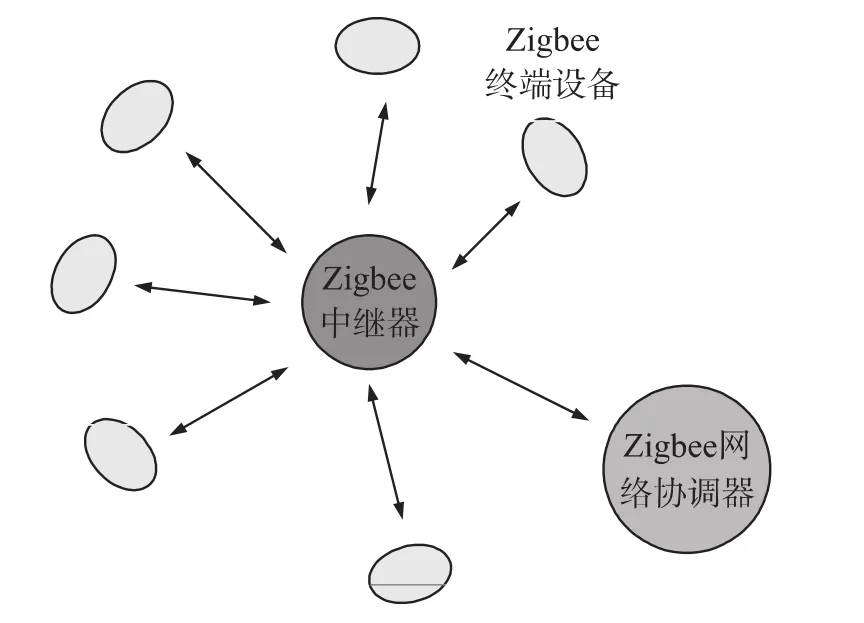
圖1 無線傳感系統(tǒng)的網(wǎng)絡(luò)拓撲結(jié)構(gòu)
在星型網(wǎng)絡(luò)拓撲結(jié)構(gòu)中,網(wǎng)絡(luò)中的各節(jié)點通過點到點的方式連接到一個中央節(jié)點上,由該中央節(jié)點向目的節(jié)點傳送信息。中央節(jié)點執(zhí)行集中式通信控制策略,在星型網(wǎng)中任何兩個節(jié)點要進行通信都必須經(jīng)過中央節(jié)點控制。
2.2 無線傳感器網(wǎng)絡(luò)索力測試系統(tǒng)
無線傳感器網(wǎng)絡(luò)索力測試系統(tǒng)結(jié)構(gòu)如圖2所示。
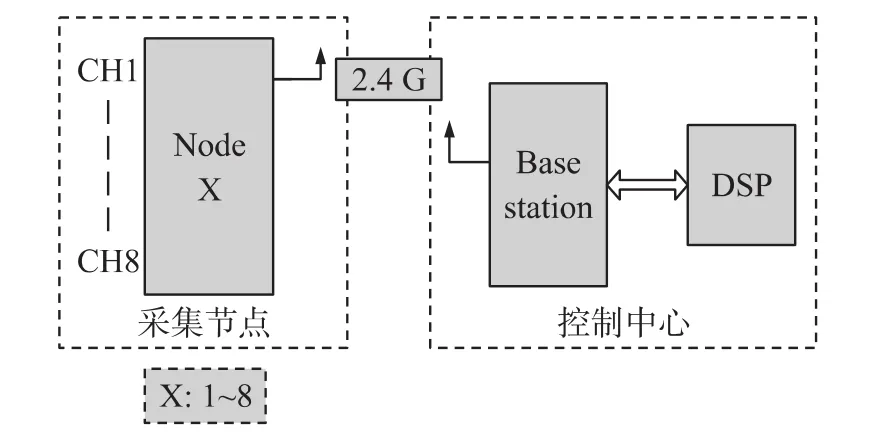
圖2 無線傳感測試系統(tǒng)結(jié)構(gòu)
所設(shè)計的系統(tǒng)由一個無線控制中心和8個無線采集節(jié)點組成。整個系統(tǒng)有64個采集通道,即每一個無線采集節(jié)點有8個20 bit A/D通道。采樣數(shù)據(jù)在2.4 GHz無線信道進行傳輸,負責(zé)數(shù)據(jù)傳輸?shù)拿恳粋€數(shù)據(jù)信道都在一個穩(wěn)定的頻帶。而無線控制中心和每一個無線采集節(jié)點具有相同的,穩(wěn)定的命令頻段以便快速進行命令、數(shù)據(jù)的傳遞。
采集節(jié)點利用現(xiàn)有的微機電(MEMS)技術(shù)和嵌入式處理(MCU)技術(shù)進行器件集成,并采用模塊化方式進行設(shè)計[10-11]。該節(jié)點由低頻加速度傳感器、接口單元、微處理器、無線通信模塊、存儲器、電源管理模塊等部分組成。采集節(jié)點結(jié)構(gòu)如圖3所示。
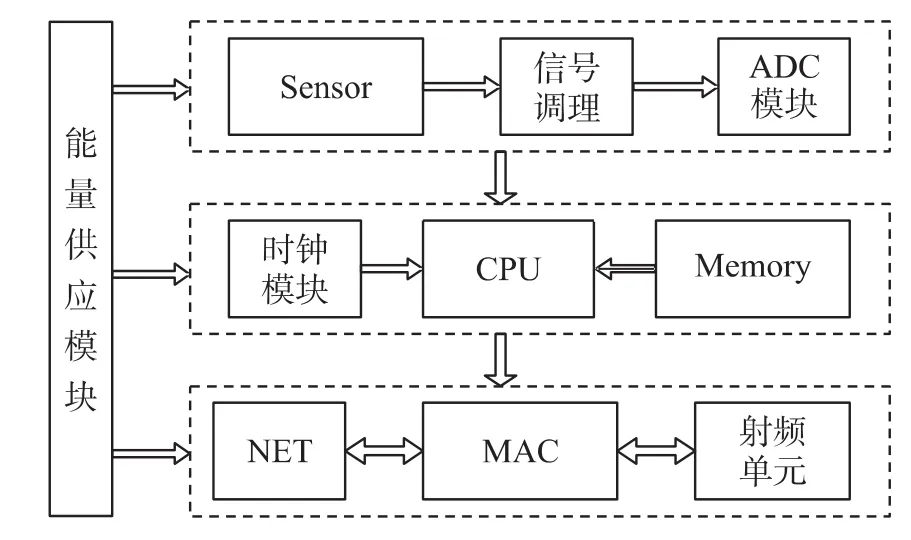
圖3 采集節(jié)點結(jié)構(gòu)
超低頻振動信號檢測屬于弱信號檢測范疇,對加速度傳感器的低頻特性、靈敏度等要求較高,所以選用具有動態(tài)范圍大、測量精度高等特點的力平衡加速度傳感器。微處理單元(MCU)選用TI高性能16 bit微處理器MSP430F5438,具有良好的低功耗特性,可滿足無線傳感節(jié)點低功耗和快速數(shù)據(jù)處理的設(shè)計要求。
控制中心由無線收發(fā)基站和具有強大數(shù)據(jù)處理能力及高運行速度的DSP芯片構(gòu)成,其中,DSP系統(tǒng)通過串口與基站相連。DSP系統(tǒng)設(shè)置有4個按鍵開關(guān),分別表示設(shè)置采樣頻率,發(fā)送時鐘信息,開始采集,結(jié)束采集等命令,其中采樣頻率開關(guān)可通過連續(xù)觸動,分別在50 Hz、100 Hz和200 Hz之間進行選擇。同時,在DSP內(nèi)部集成有索力基頻識別及索力公式算法[12],當(dāng)采集結(jié)束后,DSP對Flash內(nèi)存儲的采集數(shù)據(jù)自動進行分析處理,通過輸入橋梁的相關(guān)參數(shù),給出索力計算結(jié)果。
集成后的采集節(jié)點系統(tǒng)和控制中心系統(tǒng)如圖4所示。
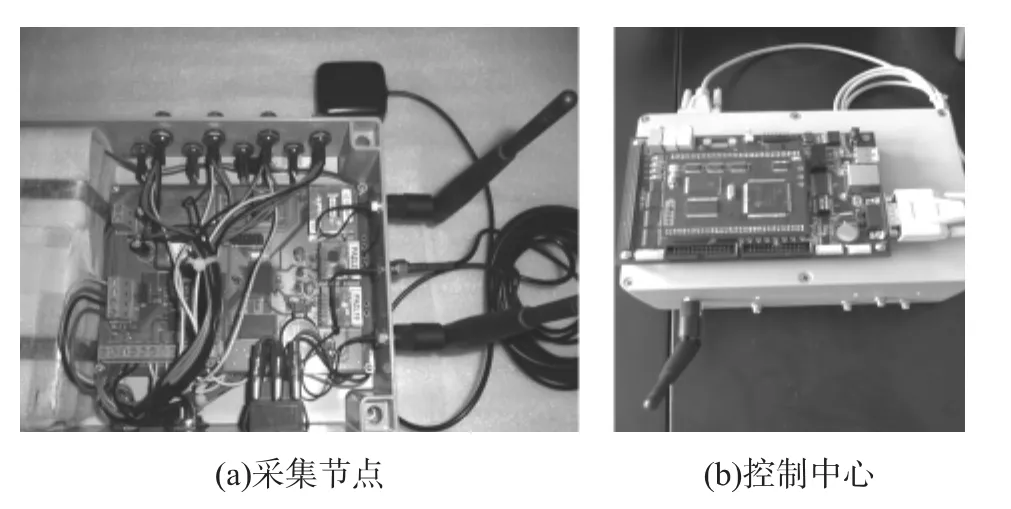
圖4 無線傳感器網(wǎng)絡(luò)索力測試系統(tǒng)設(shè)備圖
3 索力測試實驗
為驗證所開發(fā)的測試系統(tǒng)及嵌入式索力算法,進行了實驗室橋梁模型和實際橋梁索力測試實驗。
3.1 橋梁模型實驗
測試對象為大連理工大學(xué)智能結(jié)構(gòu)試驗室里的斜拉索橋模型(圖5所示):拉索橫截面面積A=0.000 137 4 m2;拉索單位長度的質(zhì)量 m=1.01 kg/m;拉索長度L=11.3 m;拉索與水平地面的夾角θ=19.47°;彈性模量 E=1.95×1011Pa。

圖5 橋梁模型實驗
為了驗證無線傳感器網(wǎng)絡(luò)測定索力的精確性,通過拉壓力傳感器進行索力大小的直接讀取來進行比對試驗。
3.1.1 無線傳感器網(wǎng)絡(luò)測試系統(tǒng)框圖
本文采用內(nèi)置IC放大器的壓電加速度傳感器作為傳感單元,連接到所研制的無線監(jiān)測系統(tǒng)上,進行斜拉索垂直于拉索方向的加速度測試。所測試的數(shù)據(jù)經(jīng)無線傳感節(jié)點初步處理后以無線通信模式發(fā)送到無線傳感基站,利用工控機嵌入到索力算法程序,從而完成索力的測試和比對。
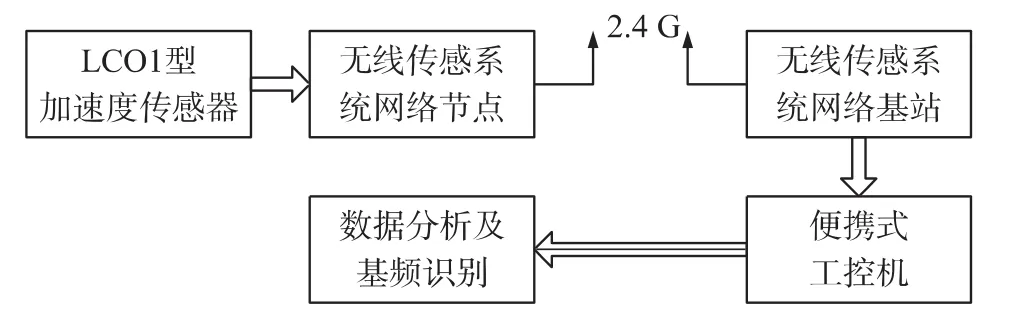
圖6 無線低頻振動檢測系統(tǒng)架構(gòu)圖
3.1.2 拉壓力傳感器對比試驗框圖
該對比試驗采用了RSS02型拉壓力傳感器(0~20 T)。RSS02系列傳感器采用S型剪切結(jié)構(gòu),具有結(jié)構(gòu)合理、溫度特性好、抗過載能力強、工作穩(wěn)定等特點。
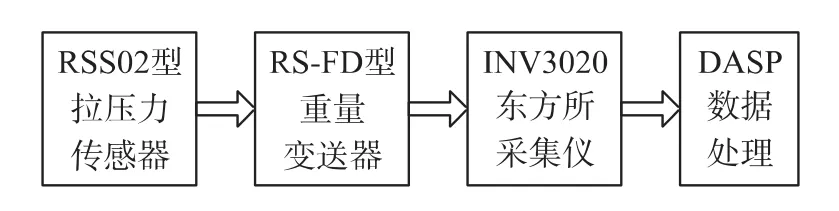
圖7 拉壓力傳感器對比試驗框圖
3.1.3 試驗對比方案圖表
通過扳手轉(zhuǎn)動拉索底部的螺栓旋鈕,來設(shè)定不同的索力大小,其值由拉壓力傳感器直接讀取。
對拉索的索力設(shè)定方案見表1。
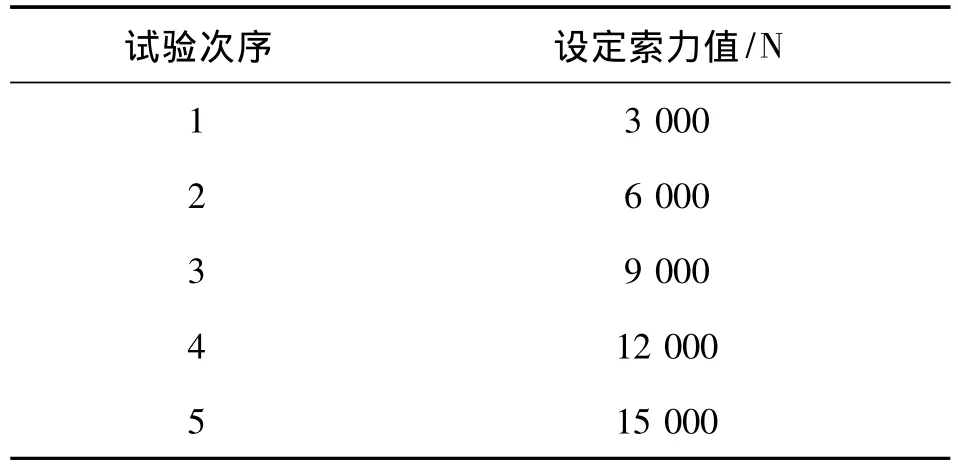
表1 索力值設(shè)定方案
3.1.4 試驗結(jié)果分析
(1)頻譜分析
頻譜分析采用現(xiàn)代功率譜估計中的AR模型法[13-14],此法相對經(jīng)典功率譜譜分析,其分辨率更高,方差性能更好,可直接由Matlab中的Pburg函數(shù)實現(xiàn)[15]。圖8為第3次試驗測得的功率譜密度。由圖8可以看出各階模態(tài)對應(yīng)的功率譜密度峰值非常明顯,而且相鄰峰值之間的頻率間隔基本相等。同時,該頻譜圖表明用現(xiàn)代功率譜估計法處理所得到的頻譜圖分辨率更高,收斂性更好。
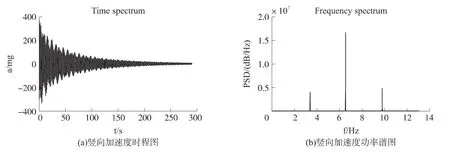
圖8 第三次測試豎向加速度時程圖與功率譜密度圖
(2)索力值計算
根據(jù)設(shè)定索力,由公式推算出反應(yīng)垂度等影響的常數(shù)λ2,確定選用式(3)進行索力計算。
斜拉鎖的設(shè)定索力和利用該無線傳感系統(tǒng)所測得的索力對比,如圖9所示。
3.2 實橋測試實驗
現(xiàn)場測試對象為大連華錄橋(圖10),該橋共有4根斜拉索,分別命名為1#,2#,3#,4#。我們分別在1#和2#索上布設(shè)加速度傳感器,并間隔性地對拉索進行6次激勵。同時為了驗證在現(xiàn)場環(huán)境下無線傳感系統(tǒng)的可靠性,進行了有線對比試驗。有線采集系統(tǒng)利用NI多通道采集設(shè)備,同時利用LabVIEW語言和DAQ采集模塊驅(qū)動程序進行數(shù)據(jù)采集和處理。
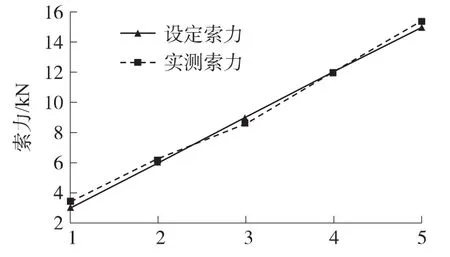
圖9 斜拉橋設(shè)定索力與實測索力對比圖

圖10 斜拉索位置圖
同上述關(guān)于橋梁模型的實驗原理及數(shù)據(jù)處理方法,現(xiàn)場對比實驗結(jié)果的數(shù)據(jù)分析圖譜如圖11~圖14所示。
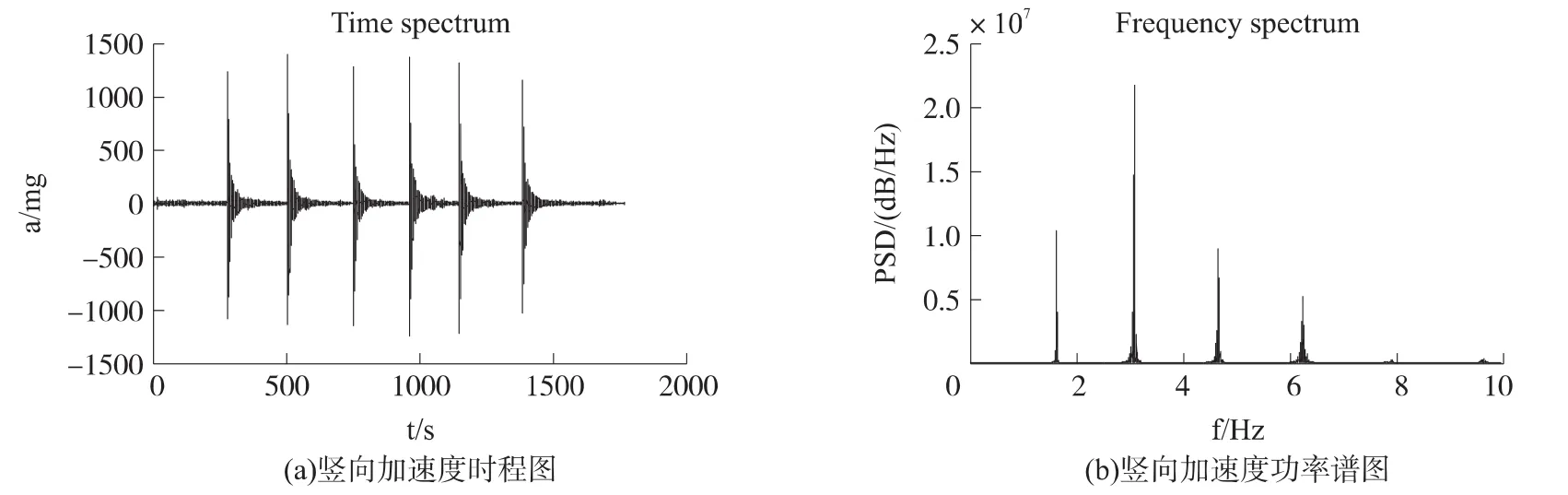
圖11 1#索的無線測量時程圖與頻譜圖
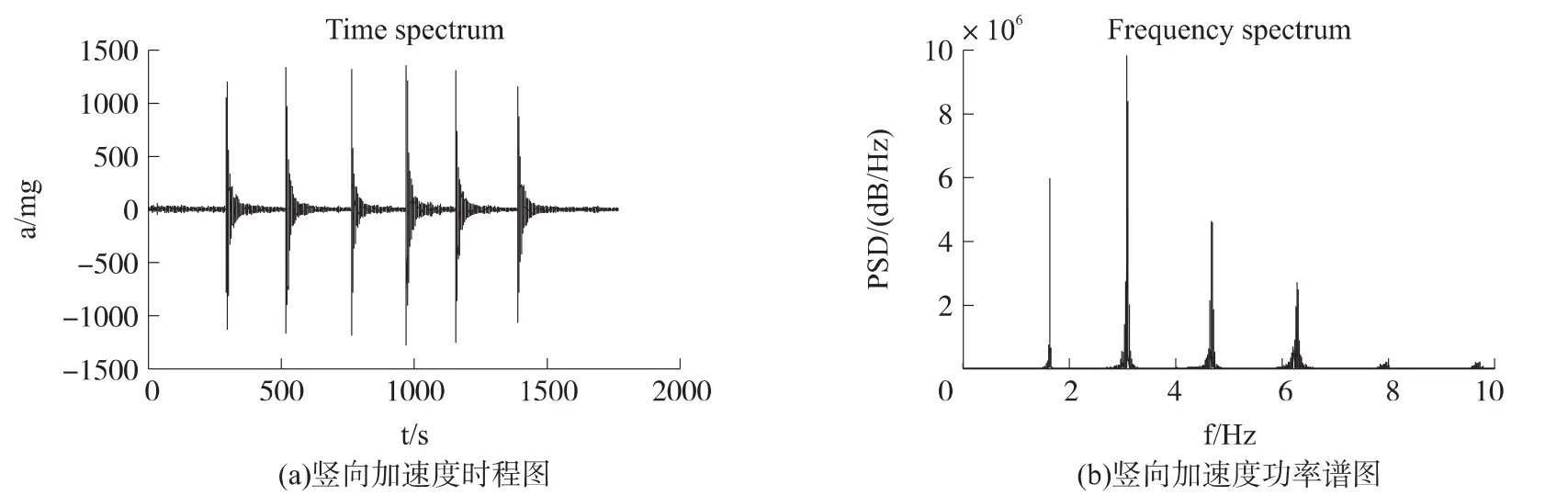
圖12 1#索的有線測量時程圖與頻譜圖
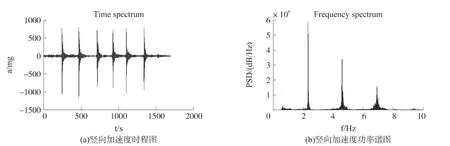
圖13 2#索的無線測量時程圖與頻譜圖
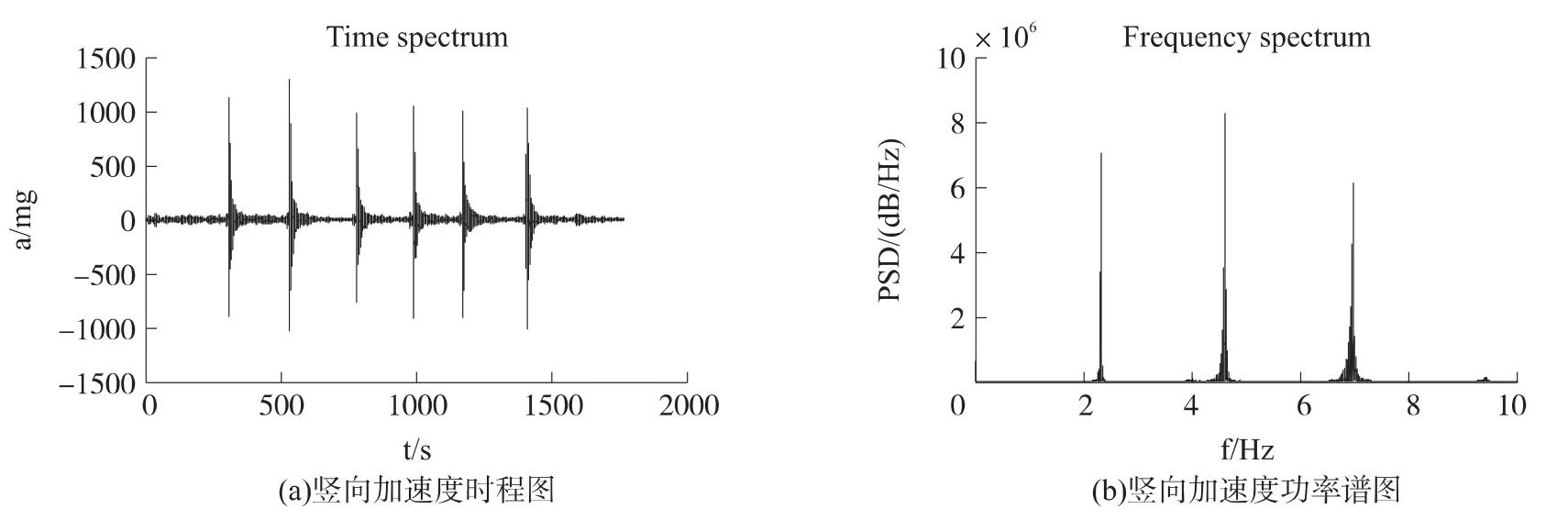
圖14 2#索的有線測量時程圖與頻譜圖
從圖11、圖12的時程圖可以看出,每次索力的峰值分別是對拉索外加激勵的結(jié)果,本次現(xiàn)場測試共進行了6次加載,1#和2#的拉索均真實且同步反應(yīng)出了本次加載情況。通過與有線采集系統(tǒng)測試結(jié)果圖對比可知,在現(xiàn)場真實環(huán)境下,無線傳感系統(tǒng)能夠可靠準確地測得拉索的振動狀況。
無線測得的1#斜拉索與2#斜拉索的各階振動頻率(Hz)如表2所示。
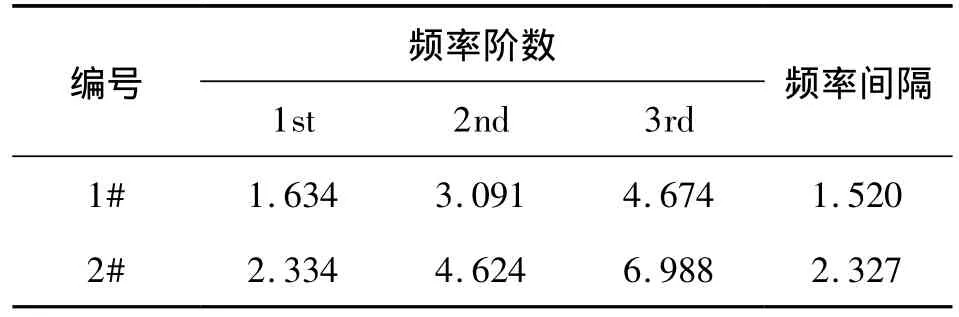
表2 拉索的各階振動頻率
由橋梁參數(shù)及嵌入式索力算法,實測得1#索力73 kN,2#索力95 kN。通過實驗結(jié)果及橋梁結(jié)構(gòu)安全分析,可知斜拉索的索力值偏小,不滿足斜拉橋的斜拉索受力要求,處于不合理狀態(tài)。上述結(jié)論提交給橋梁管理方,為其進行索修復(fù)提供了依據(jù)。
4 結(jié)論
本文論述了利用振動法測斜拉橋索力的原理,介紹了無線傳感系統(tǒng)的整體架構(gòu)及模塊化設(shè)計,并通過在系統(tǒng)中嵌入索力算法,完成了對實驗室的斜拉橋模型以及現(xiàn)場拉索橋的索力測試。
橋梁模型實驗結(jié)果表明,所測數(shù)據(jù)質(zhì)量非常好,與拉壓力傳感器直接測得的設(shè)定索力值基本一致,所以利用該無線傳感系統(tǒng)進行斜拉索橋的索力測試是準確可靠的。通過對現(xiàn)場橋梁的對比實驗分析,表明該檢測系統(tǒng)可以用于實際橋梁的索力測量,滿足工程精度要求。總之,本系統(tǒng)在斜拉橋的索力檢測應(yīng)用中具有方便快捷、準確可靠等特點,具有極高的推廣價值。
[1]鄭燦.基于頻率法的索力測試方法及索的損傷研究[D].浙江:浙江大學(xué)結(jié)構(gòu)工程,2008:1-3.
[2]王朝華,李國蔚,何祖發(fā),等.斜拉橋索力測量的影響因素分析[J].世界橋梁,2004(3):64-67.
[3]劉志軍,陳國平,黨志杰.檢測斜拉索張力的振動法及其應(yīng)用[J].南京航天航空大學(xué)學(xué)報,2006,38(5):609-6121.
[4]石春香,李胡生,林立.考慮剛度及邊界條件的短索索力求解與試驗研究[J].地震工程與工程振動,2010,30(2):86-911.
[5]陳剛,任偉新.基于環(huán)境振動的斜拉橋拉索基頻識別[J].地震工程與工程振動,2003,23(3):100-106.
[6]Kim B H,Park T.Estimation of Cable Tension Force Using the Frequency-Based System Identification Method[J].Journal of Sound and Vibration,2007,304:660-676.
[7]Yu Yan,Ou Jinping,Zhang Jun,et al.Development of Wireless MEMS Inclination Sensor System for Swing Monitoring of Large Scale Hook Structures[J].IEEE Transactions on Industrial Electronics,2009,56(4):1072-1078.
[8]喻言,歐進萍.海洋平臺結(jié)構(gòu)振動監(jiān)測的無線傳感實驗研究[J].哈爾濱工業(yè)大學(xué)學(xué)報,2007,39(2):187-190.
[9]常超,鮮曉東,胡穎.基于WSN的精準農(nóng)業(yè)遠程環(huán)境監(jiān)測系統(tǒng)設(shè)計[J].傳感技術(shù)學(xué)報,2011,24(6):880-882.
[10]Yu Yan,Zhao Xuefeng,Wang Yang,et al.A Study on PVDF Sensor Using Wireless Experimental System for Bridge Structural Local Monitoring[J].Journal of Telecommunication Systems,2011.
[11]曹建福,金楓.大型裝備狀態(tài)監(jiān)測無線傳感器網(wǎng)絡(luò)的研究[J].傳感技術(shù)學(xué)報,2011,24(4):571-574.
[12]侯立群,歐進萍,趙雪峰,等.哈爾濱四方臺斜拉橋模態(tài)參數(shù)和索力識別[J].振動與沖擊,2009,28(5):107-109.
[13]朱慶,王忠,周旋.一種基于擬牛頓法的AR模型參數(shù)估計[J].電子測量技術(shù),2007,11(30):43-45.
[14]Marple S L.A New Autoregressive Spectrum Analysis Algorithm[J].IEEE Transactionson Acoustics,Speech and Signal Procession,1980,28(4):441-454.
[15]陳懷琛,吳大正.MATLAB及在電子信息課程中的應(yīng)用[M].2版.北京:電子工業(yè)出版社,2004.
[16]Hua X,Ni Y,Chen Z,et al.Structural Damage Detection of Cable-Stayed Bridges Using Changes in Cable Forces and Model Updating[J].J Struct Eng, ,135(9):1093-1106.
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
