打造“獵鷹之爪”
2013-04-29 00:44:03吳凱方瑤任業正
發明與創新·中學生 2013年5期
吳凱 方瑤 任業正
隨著高新技術發展日新月異,機器人逐漸成為國內外科技人員的研究課題,中國每年舉辦的大學生機器人大賽也著實吸引了許多人,尤其是我們青年學生的眼球。
一次討論時,吳凱見識了智能化機器人的魅力后提出,雖然以我們現在的能力還不能做成一個完整的機器人,但能否做一個智能的手臂來轉移物體呢?經過討論,我們決定做一個能自動抓球的機器手。
我們把想法告訴科技輔導老師后,得到了他的鼓勵和支持。學校的勞技教室有車床、操作臺等工具和編程用的電腦、下載用的芯片等,這為我們開展該項目提供了條件。
俗話說:“三軍未動,糧草先行”、“知己知彼,百戰不殆”,所以我們先上網查找資料,找到了一些抓手及已發明的機器臂的圖片。通過了解我們發現機器手的形式和抓取的方式有很多,也知道了需要哪些設備。特別是伺服電機不可少,它是一種可以在0°~180°之間任意旋轉,而且可以給出向前或向后的力的精確電機。更重要的是還要用電腦軟件進行編程,使機械臂智能化。
通過對智能化機器知識的了解,我們三人決定用3個伺服電機做一個具有三個自由度旋轉的機器手,使其能完成一個簡單的任務。
機器手的身體用簡單、易得、易切割的木頭來做,用廢舊的電源插座外殼來做機器手的旋轉平臺,主控器是一個RCU,動力裝置我們選用了三個伺服馬達,為了讓機器手更靈活、更智能,我們還設想裝上感應裝置,可惜后來沒能實現。接著,我們分工收集材料,如螺絲釘、乒乓球、適宜的木塊等。
一、制作機器手模型
我們找來兩個廢舊的插座外殼作為底座,將其中一個伺服電機放入其內(稱為旋轉驅動器),用一塊小木塊與泡沫固定旋轉驅動器(因為電機經常擺動易受損)。
為了使兩個外殼很好地組合且可轉動,我們用一個連接臂將其連接起來。一開始,我們用一個“一”字型的固定片,再用圓規腳的兩顆小螺絲來固定,但考慮到節約材料,我們又想到用“十字”型的固定片來固定,一頭嵌在底座上,另一頭用一顆小螺絲來固定,這樣一個連接臂就完成了。
在控制平臺上,我們安裝了兩個伺服電機,用于平臺的一前一后,前面的是給予手臂前后伸縮的力,后一個控制手臂的張合。
由于科技老師準備了伺服馬達以及一些電子設備,我們決定用馬達來帶動,可具體怎么做大家都一頭霧水。后來通過參考網上的資料和圖片,我們初步定下了方案。
手臂的制作是我們遇到的最大困難,因為手臂要考慮重力(電機的動力有限)、摩擦、形狀等多種因素。一開始,我們手工制作了一個木塊做的手臂,但由于厚度不夠,嘗試多次都不行,于是我們打算重做。
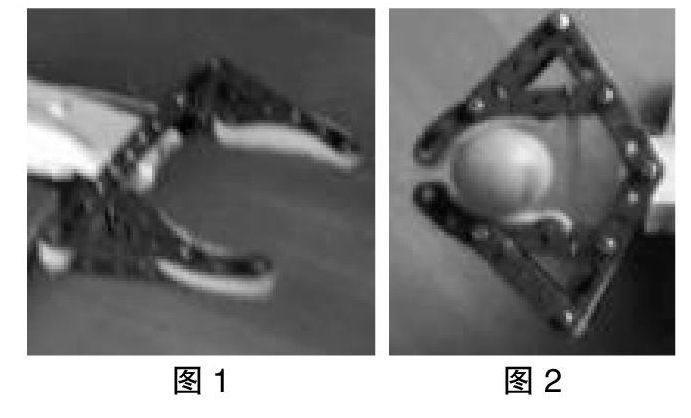
方瑤利用寒假找了一些金屬片,開學后大家一起動手制作。在兩塊金屬片間夾一塊一定厚度的泡沫,經過試驗,效果不錯,只是泡沫的摩擦力還不夠,需要改進(如圖1)。
我們想到了用摩擦系數大的布料來增大摩擦力,或者在爪子的最前端用鐵絲做成“]”形來固定球,不讓其“跑”掉。手臂伸縮、電機的木棒轉動時的半徑會隨手臂的伸縮而改變大小,此時吳凱想到在木棒上刻一個槽,讓釘子可以上下滑動以適應相應的大小。
大家力往一處使,連續幾天一到課外活動時間,就去科技館制作教室,或設計草圖或按圖施工,慢慢地機器手逐漸成形,動力裝置也基本解決,至此硬件部分大體完成(如圖2)。
二、“獵鷹之爪”抓球過程設計
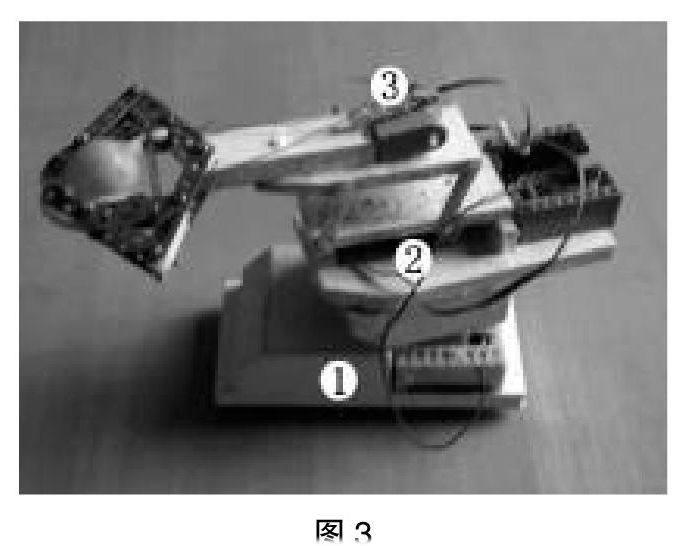
我們制作的機器爪子主要功能是將球從一個地方移到另一個地方,主要的構成零件是3個伺服馬達及其連接部件,大部分動作完成靠這3個伺服馬達完成(如圖3)。
伺服馬達①相當于人的腰,控制著上身在0°~180°任意角扭轉,將“控制臺”左(或右)移動、調整爪子抓取的方向。
伺服馬達②相當于大腿,它調整爪子伸出和縮回的幅度。
伺服馬達③便是控制爪子的張開和合攏,是抓取球的關鍵。
整個工作過程如下:
機器爪子運行前,爪子呈張開狀態,運行時,伺服馬達①向左(或向右)轉動90°,帶動控制臺轉動,使整個爪子位于球的正前方,停隔幾秒,伺服馬達②向前轉動,手臂伸出,使球位于爪子中心,停隔幾秒,伺服馬達③向前轉動,爪子抓緊小球,整個“取”的過程便完成了,再者是“送回”的過程。
伺服馬達②向后轉動,爪子縮回,停隔幾秒,伺服馬達①向右(或向左)轉回,使“機身”轉回原位,停隔幾秒,伺服馬達②向前轉動,爪子再次伸出停隔幾秒,伺服馬達③向后轉動,爪子張開,球落到目標點。
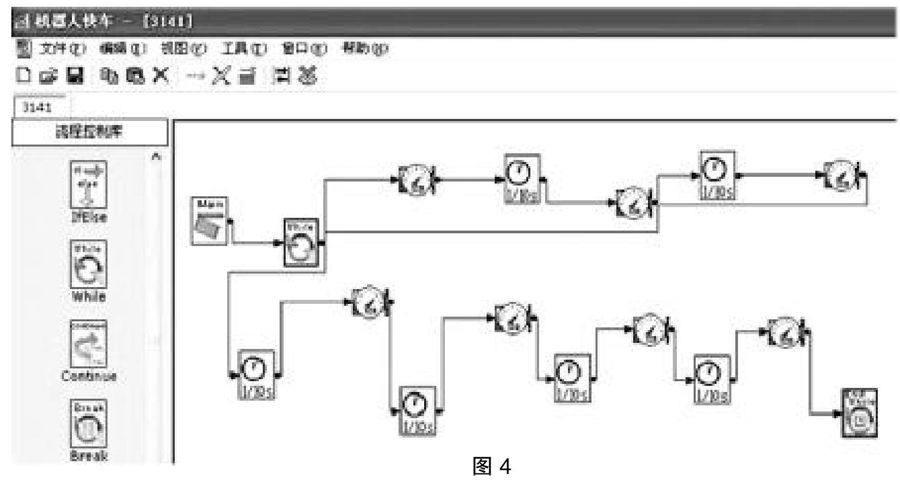
整個過程可以通過“機器人快車”軟件來編成程序, 循環執行結束。
三、安裝智能模塊,編寫程序
我們上網查找了有關信息和資料,了解RCU、伺服馬達和感應裝置的功能和使用方法,然后按照預先的設想開始編程。
畢竟這是我們第一次嘗試為機器人編輯應用程序(如圖4),總想早點完成編程,將其應用到機器手上,可越著急遇到的麻煩越多。好在大家都沒有半途而廢,多次的失敗也讓我們積累了經驗,一周后,我們終于編出了一套切實可行的程序。接著安裝智能模塊,將RCU裝在尾部,調整三號伺服馬達的位置,平衡整體重心,又將鋼絲(后來用細鉛絲代替)連在一起,仿照自行車的剎車結構成為牽引,完成爪的閉合。最后通過數據線把電腦上的程序輸入RCU,就算基本完工,等著調試了。
在調試中,由于智能化的要求,我們對手臂的運動范圍、運行速度、取球的動作設計等進行討論與調整,稍有一些理論基礎的方瑤、任業正便開始找書、學習《機器人快車》中的程序,提供一些整體思路及細節問題的解決,吳凱則對機器手的裝置進一步進行改良完善。
經過幾個月的努力,機器手終于能在一定范圍抓取乒乓球了,取球、放球,動作干凈利索,如同工廠自動化生產線上的貨物自動裝卸,像“獵鷹之爪”一樣靈動起來。
(指導老師:汪文峰)