一種改進(jìn)的高精度地圖自動(dòng)配準(zhǔn)方法
2020-01-03 06:49:08薛宇飛葛君霞郭兆鐘
測(cè)繪通報(bào) 2019年12期
王 淼,薛宇飛,葛君霞,郭兆鐘
(北京四維圖新科技股份有限公司,北京 100094)
適用于自動(dòng)駕駛的道路高精度地圖相較普通導(dǎo)航電子地圖而言,具有更高精度、更加詳細(xì)的地圖元素、更加豐富的屬性,對(duì)于無人車定位、導(dǎo)航、控制及安全至關(guān)重要,是自動(dòng)駕駛的核心技術(shù)之一[1-2]。為了保證自動(dòng)駕駛系統(tǒng)的安全性,地圖的時(shí)效性,即鮮度與精度同樣重要。因此,需要持續(xù)更新自動(dòng)駕駛道路高精度地圖數(shù)據(jù)庫。而更新地圖的關(guān)鍵課題為如何高效地融合多次采集的數(shù)據(jù)。
由于移動(dòng)測(cè)量的復(fù)雜性,測(cè)量中的隨機(jī)誤差不可避免,不同時(shí)刻或不同設(shè)備采集的地圖數(shù)據(jù)不能直接拼接融合在一起。因此,首先需要將兩次采集的數(shù)據(jù)在沒有發(fā)生變化的地圖要素處配準(zhǔn)一致,才能通過差分運(yùn)算,檢測(cè)出數(shù)據(jù)之間的真實(shí)差異,如車道邊線的新增、刪除或幾何形態(tài)變化。
高精度地圖數(shù)據(jù)采集的誤差源主要包括:不同時(shí)刻衛(wèi)星信號(hào)的差異對(duì)GPS接收機(jī)定位結(jié)果的影響;不同時(shí)刻慣導(dǎo)的漂移不同;不同天氣對(duì)激光雷達(dá)采集點(diǎn)云數(shù)據(jù)的影響等,這些誤差來源具有隨機(jī)性和不確定性。因此不同時(shí)刻的采集數(shù)據(jù)不是簡單的線性變換關(guān)系,采用傳統(tǒng)的線性最小二乘算法實(shí)現(xiàn)仿射變換[3],不能滿足高精度地圖對(duì)配準(zhǔn)的要求。為提高配準(zhǔn)精度,本文提出了一種利用正則化的局部加權(quán)薄板樣條函數(shù)擬合算法實(shí)現(xiàn)配準(zhǔn)的非線性變換方法,配準(zhǔn)效果良好,以3 cm作為配準(zhǔn)成功閾值,配準(zhǔn)率可達(dá)95%以上。通過生產(chǎn)應(yīng)用,證明該方法完全滿足自動(dòng)駕駛道路高精度地圖更新要求。
1 高精度地圖配準(zhǔn)流程
配準(zhǔn)工具的目標(biāo)是將不同時(shí)刻或不同設(shè)備采集的同路段高地圖數(shù)據(jù)進(jìn)行融合。本文將待配準(zhǔn)地圖數(shù)據(jù)稱為源地圖數(shù)據(jù),配準(zhǔn)的目標(biāo)地圖數(shù)據(jù)稱為目標(biāo)地圖數(shù)據(jù),配準(zhǔn)后的地圖數(shù)據(jù)稱為成果地圖數(shù)據(jù)。
配準(zhǔn)實(shí)現(xiàn)的基本流程主要包括變換場(chǎng)生成和配準(zhǔn)兩部分。其中變換場(chǎng)生成階段先選取合適的同名點(diǎn),然后利用正則化的局部加權(quán)薄板樣條函數(shù)進(jìn)行插值,生成最終的變換場(chǎng);配準(zhǔn)時(shí)將源地圖數(shù)據(jù)的各要素根據(jù)變換場(chǎng)配準(zhǔn)到目標(biāo)地圖數(shù)據(jù),進(jìn)而生成成果地圖數(shù)據(jù)。基本流程如圖1所示。
2 配準(zhǔn)算法
薄板樣條函數(shù)(TPS)[4]擬合方法在圖像配準(zhǔn)中應(yīng)用較多,可以根據(jù)離散、稀疏的控制點(diǎn)生成光滑的三維表面[5]。
薄板樣條函數(shù)是一種常見的插值方法[6],通過在兩張圖像中找出控制點(diǎn)的方式,應(yīng)用TPS可以將控制點(diǎn)形變到對(duì)應(yīng)位置,同時(shí)給出整個(gè)空間的形變矩陣[7]。但由于傳統(tǒng)薄板樣條函數(shù)生成變換場(chǎng)時(shí)需要圖幅中的所有控制點(diǎn)均參與變換,計(jì)算量大且局部變換不一致時(shí)配準(zhǔn)效果不佳。為避免此弊端,本文采用了一種局部加權(quán)薄板樣條方法生成變換場(chǎng)。局部加權(quán)薄板樣條函數(shù)原理與薄板樣條相似,只是生成變換場(chǎng)時(shí)每個(gè)控制點(diǎn)只由其臨近的N個(gè)控制點(diǎn)決定,不受全局其他控制點(diǎn)的影響。N個(gè)鄰近控制點(diǎn)的選取通過KD樹鄰近點(diǎn)搜索算法實(shí)現(xiàn)[8]。鑒于高精度地圖道路要素一般變化比較平緩,在局部加權(quán)薄板樣條基礎(chǔ)上引入了正則化參數(shù)。正則化參數(shù)與薄板樣條彎曲能量之間呈負(fù)相關(guān),正則化參數(shù)越大,彎曲能量則越小,擬合的曲面越趨于平緩[9-10]。
局部加權(quán)薄板樣條函數(shù)基于生成最小曲率的面來擬合控制點(diǎn),其二維空間的近似表達(dá)式如下
(1)

(2)
式中,PTM=0是邊界限制條件,保證在無限遠(yuǎn)處剛性變換為0;K為N×N矩陣;P為N×3矩陣;M和V為N維列矩陣;A為三維列矩陣。各矩陣表達(dá)形式如下
(3)
(4)
(5)
(6)
通過解算式(2)可得到未知數(shù)M和系數(shù)矩陣A。在此基礎(chǔ)上,利用式(7)計(jì)算薄板樣條彎曲能量。
設(shè)定一個(gè)彎曲能量收斂閾值,如果彎曲能量大于設(shè)定閾值,則調(diào)整正則化參數(shù)σ,重新迭代,直至彎曲能量小于閾值,迭代結(jié)束,生成變換場(chǎng)矩陣。
If=WTKW
(7)
在配準(zhǔn)過程中,對(duì)每個(gè)控制點(diǎn)P(xi,yi)賦予一個(gè)權(quán)值Wi(R),其形式如下
(8)
利用加權(quán)平均的方法,對(duì)過任一點(diǎn)P(x,y)的所有薄板樣條函數(shù)取加權(quán)平均來確定其對(duì)應(yīng)的各個(gè)分量。
其中X值分量映射函數(shù)f(x,y)計(jì)算如下
(9)
Y分量映射函數(shù)g(x,y)為
(10)
Z分量映射函數(shù)h(x,y)為
(11)
正則化的局部加權(quán)薄板樣條擬合法目的是將距離點(diǎn)P(x,y)最近的控制點(diǎn)影響最大,距離越遠(yuǎn)影響越小。當(dāng)控制點(diǎn)P(xi,yi)與點(diǎn)P(x,y)的距離大于RiN時(shí),則不計(jì)其影響。
3 試驗(yàn)驗(yàn)證
將某工程t1時(shí)刻采集的高精度地圖數(shù)據(jù)作為源地圖數(shù)據(jù),選用t2時(shí)刻采集的高精度地圖數(shù)據(jù)作為目標(biāo)地圖數(shù)據(jù),利用本文的整套配準(zhǔn)算法和線性最小二乘算法作對(duì)比試驗(yàn)。其中線性最小二乘算法與本文提出的正則化的局部加權(quán)算法實(shí)現(xiàn)配準(zhǔn)的流程相同,該算法也是在控制點(diǎn)選取之后,利用最小二乘算法生成變換場(chǎng),從而實(shí)現(xiàn)高精度地圖的剛性配準(zhǔn)。其實(shí)現(xiàn)原理如下[2,11]
Y=RX+t
(12)
式中,Y表示變換后坐標(biāo);X表示變換前坐標(biāo);R為旋轉(zhuǎn)矩陣;t為平移矩陣。具體實(shí)現(xiàn)不再詳述。
不同要素配準(zhǔn)后對(duì)比結(jié)果如圖2—圖5所示,其中線性連續(xù)要素配準(zhǔn)結(jié)果如圖2—圖4所示,點(diǎn)狀離散要素配準(zhǔn)結(jié)果如圖5所示。
圖2—圖5中,淺色線條均代表源地圖數(shù)據(jù),深色均表示目標(biāo)地圖數(shù)據(jù)。從圖2—圖5可以看出,本文配準(zhǔn)算法整體貼合度更好,明顯優(yōu)于線性最小二乘算法。為了更好地統(tǒng)計(jì)兩種算法匹配率情況,對(duì)整個(gè)工程配準(zhǔn)結(jié)果中各要素配準(zhǔn)成功率進(jìn)行統(tǒng)計(jì),結(jié)果見表1。
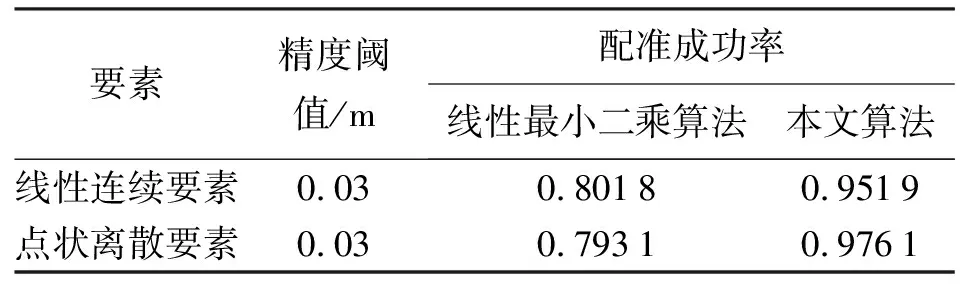
表1 各要素配準(zhǔn)成功率統(tǒng)計(jì)
從表1中可以看出,在相同試驗(yàn)場(chǎng)景和相同判定標(biāo)準(zhǔn)下,本文算法配準(zhǔn)成功率較最小二乘算法有了大幅度提升。
為進(jìn)一步評(píng)估算法的配準(zhǔn)效果,本文將目標(biāo)配準(zhǔn)地圖數(shù)據(jù)各控制點(diǎn)作為真值,以成果地圖數(shù)據(jù)的各對(duì)應(yīng)點(diǎn)為待驗(yàn)證值,通過統(tǒng)計(jì)目標(biāo)數(shù)據(jù)與成果數(shù)據(jù)所有要素對(duì)應(yīng)點(diǎn)之間的距離偏差,以及均方根誤差(RMSE),對(duì)配準(zhǔn)后效果及精度進(jìn)行評(píng)價(jià)。配準(zhǔn)后數(shù)據(jù)偏差及均方根誤差統(tǒng)計(jì)結(jié)果如圖6、圖7所示。
圖6、圖7中橫坐標(biāo)表示目標(biāo)地圖數(shù)據(jù)與成果地圖數(shù)據(jù)同名點(diǎn)之間的偏差,單位cm,如0—1表示距離偏差在0~1 cm之間;縱坐標(biāo)表示對(duì)應(yīng)偏差范圍內(nèi)點(diǎn)數(shù)占總點(diǎn)數(shù)的比例;RMSE為對(duì)應(yīng)圖幅的均方根誤差。通過圖6與圖7的對(duì)比結(jié)果,可以看出本文算法與目標(biāo)地圖數(shù)據(jù)的偏差更小,精度更高。
綜上,配準(zhǔn)前數(shù)據(jù)存在明顯偏差,采用線性最小二乘算法,大部分配準(zhǔn)效果較配準(zhǔn)前有較大改善,但局部配準(zhǔn)效果不佳;而采用本文正則化的局部加權(quán)薄板樣條算法配準(zhǔn)后成果地圖數(shù)據(jù)與目標(biāo)地圖數(shù)據(jù)貼合更緊密,配準(zhǔn)效果較線性最小二乘擬合算法有明顯改善。
4 結(jié) 語
本文在充分考慮自動(dòng)駕駛道路高精度地圖特征的基礎(chǔ)上提出了一種正則化的局部加權(quán)薄板樣條算法,實(shí)現(xiàn)高精度地圖的配準(zhǔn),并通過實(shí)踐驗(yàn)證了方案的可行性。試驗(yàn)結(jié)果表明,該方法能有效實(shí)現(xiàn)高精度地圖數(shù)據(jù)的配準(zhǔn),有利于縮短高精度地圖數(shù)據(jù)的更新周期,為自動(dòng)駕駛系統(tǒng)地圖的時(shí)效性提供了充分的技術(shù)保證。