無人機影像特征聯合提取與雙向匹配研究
2020-01-03 07:54:04吉文來趙湘玉李明峰
測繪通報 2019年12期
關鍵詞:特征
吉文來,趙湘玉,李明峰
(南京工業大學測繪科學與技術學院,江蘇 南京 211816)
無人機航攝技術具有低成本、高效率、靈活機動、實時獲取高分辨率影像等優勢[1-2],廣泛應用于眾多領域。無人機航拍時易受大氣條件和外部環境影響,獲取的影像存在旋轉變化、尺度變化等問題,不利于影像配準等后期數據處理工作的進行[3-4]。如何提高無人機影像配準效率和精度是目前的研究熱點,具有重要的研究意義。加速穩健特征(speeded up robust features,SURF)算法[5-6]是常用的影像配準算法,繼承了尺度不變特征轉換(scale invariant feature transform,SIFT)算法[7]對尺度、旋轉、視角、光照、噪聲等變化不敏感、穩健性好的優勢[8-9],雖然計算速度相比于SIFT算法快,但其描述符計算復雜、耗時長,難以滿足無人機影像配準實時性的要求。二進制穩健尺度不變特征(binary robust invariant scalable keypoints,BRISK)算法[10]是二進制特征描述符算法,計算速度快,具有尺度不變性和旋轉不變性,但穩健性差,易造成錯誤匹配,配準精度低[11-12]。
為充分發揮SURF算法和BRISK算法各自的優勢,提高無人機影像配準效率和精度,本文將SURF算法的特征點檢測和BRISK算法的特征點描述相結合,研究無人機影像特征聯合提取方法;將雙向匹配法引入特征點精匹配,研究PROSAC雙向匹配算法,并結合試驗區無人機影像數據驗證其可行性。
1 特征聯合提取方法
SURF特征點檢測算法具有尺度不變性、旋轉不變性、光照不變性和抗噪性等優勢,檢測的特征點分布均勻;但SURF特征描述符為64維向量,計算復雜、存儲量大、生成速度慢。BRISK特征描述符為二進制字符串,計算簡單、生成速度快;但BRISK算法在特征點檢測時穩健性差,構建的空間金字塔尺度信息不豐富。因此,根據SURF算法和BRISK算法的特點,提出一種特征聯合提取(united extraction of features,UEF)方法。該方法利用SURF算法在尺度空間上檢測特征點,采用BRISK算法構建特征描述符,UEF方法的實現流程包括以下5個步驟。
1.1 構建尺度空間
保持原始影像大小不變,計算其積分影像,利用不同尺寸的方形濾波器對該積分影像進行濾波,建立不同尺度的空間金字塔,即多尺度空間。在尺度為σ的積分影像I上,定義某點x的Hessian矩陣為
(1)

利用Hessian矩陣計算金字塔每一層尺度下所有像素點的行列式值。由于SURF算法采用方形濾波器代替高斯濾波器,則式(1)的近似卷積可表示為Dxx、Dxy、Dyy,近似矩陣Happrox的行列式可表示為
Det(Happrox)=DxxDyy-(ωDxy)2
(2)
式中,ω為權重系數,通常取0.9。
1.2 定位特征點
設定一個閾值,當像素點的近似Hessian行列式值大于閾值時,保留該像素點,對留下的像素點進行非極大值抑制。在每個檢測點3×3×3的立體鄰域內,將檢測點與周圍26個像素點進行比較,如果檢測點的行列式值最大或最小,則可確定該點為候選特征點。對尺度空間進行插值,精確定位特征點的尺度和位置。
1.3 定義采樣點
根據BRISK特征描述符生成原理,定義特征點鄰域范圍內的采樣點。假設有N個采樣點,兩兩組成一對,共有N(N-1)/2組點對。采樣點對(pi,pj)經高斯濾波后的灰度值分別為I(pi,σi)和I(pj,σj)(σi和σj表示高斯濾波的方差),利用灰度值計算每一點對的局部梯度
(3)
1.4 確定特征點方向
利用長距離采樣點對集L計算特征點方向g及旋轉角度α。
(4)
(5)
1.5 生成特征描述符
(6)
2 PROSAC雙向匹配算法
在特征點提取結束后,需進行特征粗匹配和特征精匹配[13-14]。特征粗匹配一般采用距離比法,但初始匹配點對存在一對多匹配現象,因此宜采用雙向匹配法篩選匹配點對,以提高匹配正確率。在特征精匹配中通常采用PROSAC算法,核心是提出質量因子判斷匹配點對的等級。該方法降低了樣本選擇的隨機性,加快了運算速度,提高了匹配準確度[15]。因此,本文提出PROSAC雙向匹配算法,即在基于距離比法特征粗匹配的基礎上,通過雙向匹配法和PROSAC算法剔除誤匹配點對,完成特征精匹配,具體流程如圖1所示。
2.1 基于距離比法特征粗匹配
基于距離比法對求出的特征描述符進行特征點粗匹配。對于參考影像上的某一特征點,在待配準影像上找出與之距離最近點和次近鄰點,求解最近距離dm與次近距離dn之比,當比值小于閾值T(本文設為0.7),則認為待配準影像上距離最近的點為匹配點。距離比法的具體公式為

(7)
2.2 雙向匹配篩選
雙向匹配法是在獲得初始匹配點對集的基礎上,以待配準影像為基礎,找出參考影像上對應的特征點,即反方向求解匹配點對集,將兩次匹配結果取交集作為最終匹配點對集。
2.3 PROSAC篩選
采用PROSAC算法進行特征匹配點對篩選,剔除誤匹配點對,具體步驟如下:
(1) 降序排列點對,求解變換矩陣。按照質量因子降序排列匹配點對集,取前n組匹配點對作為樣本。由于變換矩陣含有8個未知參數,需從樣本中隨機選取4組匹配點對,進行變換參數求解,具體公式為
(8)
式中,(x′,y′)為待配準影像上特征點坐標;(x,y)為參考影像上特征點坐標,ai(i=0,1,…,7)為變換參數。
(2) 判斷內點和外點。計算剩余點對經變換后的投影點與對應匹配點之間的誤差,如果誤差小于閾值,則認為該點對是內點;反之為外點,統計內點數量。
(3) 更換樣本迭代,求解最優變換矩陣。更換4組點對,重復步驟(1)、(2),當內點數量最大時,此時的變換矩陣為最優模型矩陣,內點集為正確匹配點對集。當達到最大迭代次數時停止運算,輸出變換矩陣和內點集。
3 試驗分析
為驗證無人機影像特征聯合提取與雙向匹配方法的可行性,選擇某一測區的無人機影像為試驗數據,將SURF算法、BRISK算法與本文算法進行試驗對比,從提取特征點數與提取速度、匹配點對數與匹配正確率、算法穩健性與配準時間3個方面分析不同算法的性能。
3.1 提取特征點數與提取速度
圖2為存在一定重疊度的相鄰無人機影像。對兩幅影像分別采用SURF算法、BRISK算法和特征聯合提取(UEF)算法進行特征點提取,統計不同算法的提取特征點數、總耗時和提取速度等數據,見表1。
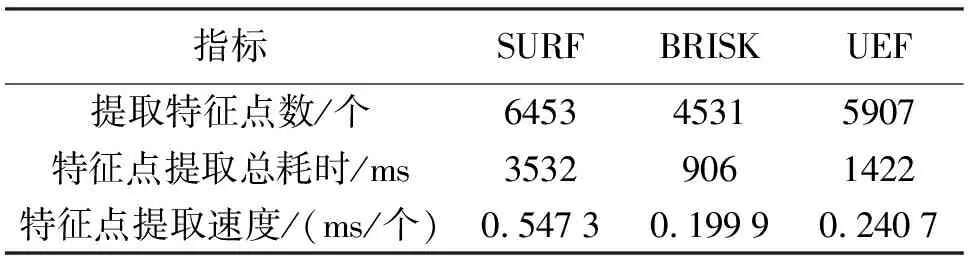
指標SURFBRISKUEF提取特征點數/個645345315907特征點提取總耗時/ms35329061422特征點提取速度/(ms/個)0.54730.19990.2407
由表1可知:SURF算法提取的特征點數最多,UEF算法次之,BRISK算法提取的特征點數最少;BRISK算法提取速度最快,UEF算法次之,SURF算法速度最慢。
提取的特征點數越多越能反映影像特征信息,提取速度反映提取效率。綜合試驗結果,UEF算法提取的特征點數多于BRISK算法,提取速度比SURF算法快一倍,整體上優于其他兩種算法。
3.2 匹配點對數與匹配正確率
在特征點提取工作的基礎上,采用PROSAC雙向匹配算法進行特征點匹配,通過試驗分別對SURF算法、BRISK算法和UEF算法的配準效果進行分析。圖3為不同算法的特征點粗匹配效果圖,可看出經過特征點粗匹配后,匹配點對連線不是所有均保持平行,存在誤匹配點對。圖4為不同算法的特征點精匹配效果圖,可看出采用PROSAC雙向匹配算法后,誤匹配點對均得到有效剔除。統計3種算法的特征匹配點對數,計算匹配正確率,見表2。匹配正確率是指精匹配點對數與粗匹配點對數的比值。
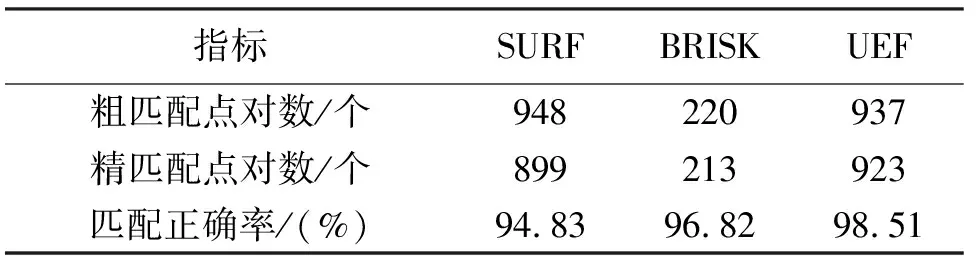
表2 匹配點對數與匹配正確率對比
由表2可知:BRISK算法匹配點對數最少,SURF算法次之,UEF算法最多,較多的正確匹配點對數有利于求解最優變換矩陣,保證配準精度;UEF算法的匹配正確率達到98%,高于SURF算法和BRISK算法。
3.3 算法穩健性與配準時間
選擇存在旋轉變化和尺度變化的無人機影像數據,根據匹配正確率分析SURF算法、BRISK算法及UEF算法的穩健性,統計配準總耗時,比較不同算法的配準效率,結果見表3。

表3 針對變化影像的不同算法性能對比
由表3可知:就匹配正確率而言,無論影像是否發生旋轉變化或尺度變化,UEF算法的匹配正確率均高于SURF算法和BRISK算法;在配準效率方面,UEF算法的配準時間介于SURF算法和BRISK算法兩者之間,配準效率較高。綜合上述分析可知,UEF算法具有穩健性好、耗時短的特點,適合處理數據量大、存在旋轉和尺度變化等問題的無人機影像。
4 結 語
為提高無人機影像配準的準確性,本文提出了影像特征聯合提取與雙向匹配方法。試驗結果表明,特征聯合提取方法具有提取特征信息豐富、提取效率高的特點,PROSAC雙向匹配算法有效剔除了誤匹配點對,本文提出的配準算法在保證配準效率的前提下匹配正確率高于SURF算法和BRISK算法,對于數據量大、存在旋轉和尺度變化等問題的無人機影像配準更具有應用價值。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化(高中版.高考數學)(2022年3期)2022-04-26 14:04:16
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38