PMSG額定風(fēng)速以上恒功率多指標(biāo)非線性控制
2013-04-27 10:47:26趙亞楠吳昕梁建華林春英
電氣開關(guān) 2013年3期
趙亞楠,吳昕,梁建華,林春英
(廣西大學(xué)電氣工程學(xué)院,廣西 南寧 530004)
PMSG額定風(fēng)速以上恒功率多指標(biāo)非線性控制
趙亞楠,吳昕,梁建華,林春英
(廣西大學(xué)電氣工程學(xué)院,廣西 南寧 530004)
討論了直驅(qū)永磁風(fēng)力發(fā)電機(jī)組(permanentmagnet wind generatation,PMSG)在額定風(fēng)速以上時(shí)的非線性控制問題。傳統(tǒng)的控制方法是采用變槳距風(fēng)力發(fā)電機(jī)組或者是調(diào)節(jié)電磁轉(zhuǎn)矩來達(dá)到功率平滑的目的。上述兩種控制方法都考慮了風(fēng)電系統(tǒng)高風(fēng)速區(qū)域時(shí)的功率限制策略,但是對(duì)系統(tǒng)的轉(zhuǎn)速控制則沒有考慮。為了有效減小風(fēng)電系統(tǒng)高風(fēng)速區(qū)域下的功率和轉(zhuǎn)速波動(dòng),在建立風(fēng)力發(fā)電系統(tǒng)非線性數(shù)學(xué)模型的基礎(chǔ)上,利用基于微分幾何狀態(tài)反饋線性化的方法,設(shè)計(jì)了新的控制策略,即通過同時(shí)調(diào)節(jié)槳距角和電磁轉(zhuǎn)矩來實(shí)現(xiàn)風(fēng)電系統(tǒng)的功率和轉(zhuǎn)速穩(wěn)定的多目標(biāo)控制策略,并且仿真驗(yàn)證了該控制策略的正確性和有效性。
直驅(qū)永磁風(fēng)力機(jī);槳距角;電磁轉(zhuǎn)矩;反饋線性化;非線性控制器
廣西科學(xué)基金資助項(xiàng)目(桂科0728027);
南寧市市校科技合作專項(xiàng)項(xiàng)目(200801029D);
北海市市校科技合作專項(xiàng)項(xiàng)目(北科合200801027)。
1 引言
作為可再生能源發(fā)電的一種技術(shù)形式,風(fēng)力發(fā)電技術(shù)在世界范圍內(nèi)得到了大力的發(fā)展。尤其是變速恒頻風(fēng)力發(fā)電技術(shù),越來越受到各國的重視。目前,在變速恒頻風(fēng)力發(fā)電技術(shù)中,應(yīng)用最廣泛的是雙饋型風(fēng)力發(fā)電機(jī)組,但該機(jī)組需要使用齒輪箱將風(fēng)力機(jī)與發(fā)電機(jī)連接起來,并且隨著功率等級(jí)的升高,增速齒輪的成本隨著單機(jī)容量的不斷增大而增大,易出現(xiàn)故障,需要經(jīng)常維護(hù),可靠性差,而且發(fā)電效率低。而直驅(qū)永磁風(fēng)力發(fā)電機(jī)組(PMSG)通過軸系將風(fēng)力機(jī)與永磁風(fēng)力發(fā)電機(jī)直接耦合,省去了齒輪箱,既減少噪音又提高了可靠性,因而逐漸受到人們的關(guān)注。所以對(duì)直驅(qū)永磁風(fēng)電機(jī)的研究是很有必要的。
直驅(qū)永磁風(fēng)力發(fā)電機(jī)的研究主要有最大風(fēng)能捕獲[1,2]和恒功率控制[3],這兩種研究都是以提高風(fēng)能利用效率為目的的。具體的說就是在風(fēng)速小于額定風(fēng)速時(shí)采用最大風(fēng)能捕獲的辦法,最大限度獲取風(fēng)能;在風(fēng)速高于額定轉(zhuǎn)速時(shí)采用恒功率控制,以較低的風(fēng)能利用率為代價(jià),實(shí)現(xiàn)對(duì)電機(jī)的保護(hù),以獲取合格的電能。
在額定風(fēng)速以上時(shí),傳統(tǒng)的控制方法是采用變槳距風(fēng)力發(fā)電機(jī)組或者是調(diào)節(jié)電磁轉(zhuǎn)矩來達(dá)到功率平滑的目的。上述兩種控制方法都考慮了風(fēng)電系統(tǒng)高風(fēng)速區(qū)域時(shí)的功率限制策略,但是對(duì)系統(tǒng)的轉(zhuǎn)速控制則沒有考慮。為了有效減小風(fēng)電系統(tǒng)高風(fēng)速區(qū)域下的功率和轉(zhuǎn)速波動(dòng),本文設(shè)計(jì)了新的控制策略,即通過槳距角和電磁轉(zhuǎn)矩的同時(shí)調(diào)節(jié)實(shí)現(xiàn)風(fēng)電系統(tǒng)的恒功率和轉(zhuǎn)速穩(wěn)定的非線性控制。仿真表明,與僅考慮槳距角或電磁轉(zhuǎn)矩調(diào)節(jié)的恒功率控制策略相比,該控制策略的效果是令人滿意的。
2 風(fēng)力發(fā)電機(jī)組的建模
2.1 風(fēng)力機(jī)數(shù)學(xué)模型
風(fēng)的動(dòng)能與風(fēng)速的平方成正比,功率是力和速度的乘積,于是風(fēng)力機(jī)軸上輸出的機(jī)械功率Pm可用下式表達(dá):

式中:Pm—風(fēng)輪機(jī)捕獲的功率,單位MW;
ρ—空氣密度,單位kg/m3;
S—風(fēng)輪掃過的面積,單位m2;
v—實(shí)際風(fēng)速,單位m2/s;
Cp—功率利用系數(shù),是葉尖速比λ和葉片槳距
角β的函數(shù)。

式中:ω—風(fēng)輪轉(zhuǎn)動(dòng)角速度,單位rad/s;
R—風(fēng)輪半徑,單位m。
如果不算入風(fēng)力機(jī)的剛性系數(shù)和阻尼系數(shù)齒輪箱慣性,那么風(fēng)力機(jī)的模型可以寫為[4]:

式中:J—風(fēng)力系統(tǒng)的等效轉(zhuǎn)動(dòng)慣量;
Tm—風(fēng)力機(jī)空氣動(dòng)力轉(zhuǎn)矩,與輸出功率Pm的函
數(shù)為:

式中:Tem—發(fā)電機(jī)電磁轉(zhuǎn)矩;
Tβ—槳距角響應(yīng)的時(shí)間常數(shù);
β—槳距角,單位(°),βr為槳距角的參考值。
2.2 永磁風(fēng)力電機(jī)數(shù)學(xué)模型
為簡(jiǎn)化起見,直接給出兩相同步旋轉(zhuǎn)坐標(biāo)系(dq)下永磁電機(jī)系統(tǒng)的等效數(shù)學(xué)模型[4]:

式(4)、(5)中:下標(biāo)字母表示d,q軸分量。
ud,uq—定子d,q軸電壓;
id,iq—定子d,q軸電流;
Ld,Lq—定子d,q軸電感;
rs—定子相電阻;
ωr—轉(zhuǎn)子永磁鐵磁場(chǎng)的旋轉(zhuǎn)速度;
ψf—永磁體磁鏈;
p—微分算子。
結(jié)合磁鏈方程,可得永磁風(fēng)力發(fā)電機(jī)的電磁轉(zhuǎn)矩:

式中:pn—永磁機(jī)極對(duì)數(shù)。
根據(jù)磁鏈與電流的關(guān)系(4),式(6)也可寫成:

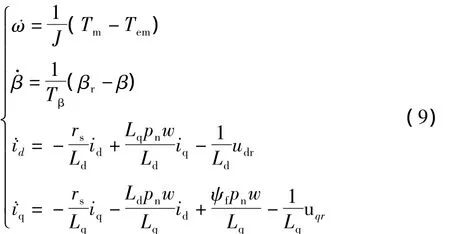
考慮發(fā)電機(jī)電磁轉(zhuǎn)矩的動(dòng)態(tài)調(diào)節(jié),由式(3)、(5)可得整個(gè)風(fēng)力發(fā)電系統(tǒng)的動(dòng)態(tài)特性方程:
3 控制器設(shè)計(jì)
3.1 基本控制策略
當(dāng)風(fēng)電機(jī)組在額定風(fēng)速以下運(yùn)行時(shí),漿距角的升高會(huì)導(dǎo)致風(fēng)能利用率的降低,因此只有在額定風(fēng)速以上時(shí),才考慮漿距角的調(diào)節(jié),即風(fēng)速升高,增大槳距角,風(fēng)速減小,減小漿距角,通過槳距角的及時(shí)調(diào)節(jié)彌補(bǔ)風(fēng)速波動(dòng)帶來的風(fēng)力機(jī)輸出功率的變動(dòng),以便維持風(fēng)力機(jī)輸出功率的穩(wěn)定。當(dāng)風(fēng)速超過設(shè)計(jì)風(fēng)速或風(fēng)力機(jī)因故障需要退出運(yùn)行時(shí),將槳距角調(diào)整到90度,使風(fēng)力機(jī)的空氣動(dòng)力轉(zhuǎn)矩為最小,以使得風(fēng)電系統(tǒng)快速退出運(yùn)行。
在額定風(fēng)速以上時(shí)的恒功率控制主要有以下兩種基本控制策略:槳距角控制和發(fā)電機(jī)電磁轉(zhuǎn)矩控制。
3.1.1 槳距角控制
在這種控制方案中,電磁轉(zhuǎn)矩被設(shè)定為一定值,不參與調(diào)節(jié);由于槳距角調(diào)節(jié)速度與風(fēng)速的變化不同步,所以整個(gè)系統(tǒng)的功率會(huì)產(chǎn)生波動(dòng)。
3.1.2 電磁轉(zhuǎn)矩控制
風(fēng)電系統(tǒng)的輸出功率與發(fā)電機(jī)電磁轉(zhuǎn)矩和風(fēng)力機(jī)的乘積成正比,所以只要保持風(fēng)力機(jī)轉(zhuǎn)速與發(fā)電機(jī)電磁轉(zhuǎn)矩的乘積恒定不變,就可使得風(fēng)電系統(tǒng)的輸出功率恒定不變。因而可利用電磁轉(zhuǎn)矩的調(diào)節(jié)實(shí)現(xiàn)輸出功率恒定的控制,圖2給出了利用電磁轉(zhuǎn)矩實(shí)現(xiàn)調(diào)節(jié)實(shí)現(xiàn)恒功率控制的控制器結(jié)構(gòu)。
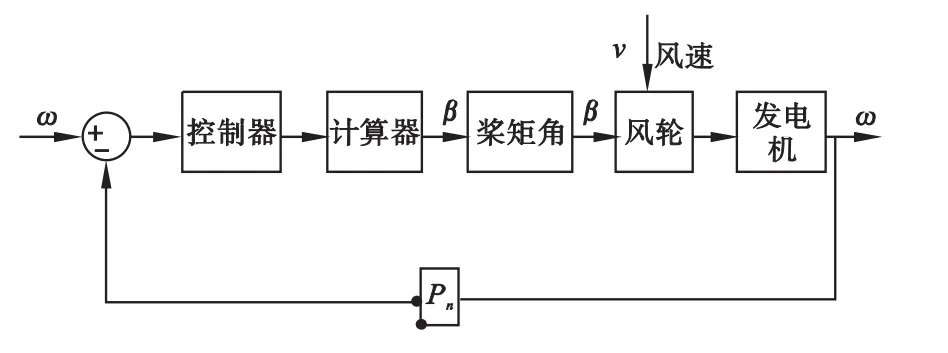
圖1 基本槳距角控制器結(jié)構(gòu)圖

圖2 基本轉(zhuǎn)矩控制器結(jié)構(gòu)圖
該控制方案能夠很好的控制輸出功率,但是風(fēng)電系統(tǒng)的轉(zhuǎn)速發(fā)生了非常大的波動(dòng)[5]。
由上述分析可知:通過單一的調(diào)節(jié)葉片槳距角或發(fā)電機(jī)電磁轉(zhuǎn)矩,都難以達(dá)到同時(shí)減小風(fēng)電系統(tǒng)的功率和轉(zhuǎn)速波動(dòng)的目的,因此在本文的設(shè)計(jì)中,我們考慮了葉片槳距角和電磁轉(zhuǎn)矩的同步控制,以達(dá)到減小風(fēng)電系統(tǒng)的功率和轉(zhuǎn)速波動(dòng)的雙重控制目標(biāo)。
風(fēng)力發(fā)電系統(tǒng)是一個(gè)變量多、耦合性強(qiáng)的非線性系統(tǒng),基于平衡點(diǎn)線性化模型所設(shè)計(jì)的控制器很難達(dá)到良好地的動(dòng)、靜態(tài)性能。基于微分幾何的狀態(tài)反饋精確線性化理論比較成熟的非線性控制理論,它通過選擇合適的坐標(biāo)變換將非線性系統(tǒng)轉(zhuǎn)化為線性系統(tǒng),對(duì)于新生成的線性系統(tǒng)采用線性控制理論進(jìn)行設(shè)計(jì),有效的避免了平衡點(diǎn)線性化存在的問題,且實(shí)現(xiàn)起來較為簡(jiǎn)單。因此,本文采用基于微分幾何狀態(tài)反饋線性化理論來設(shè)計(jì)控制器。
3.1.3 多指標(biāo)非線性[6]控制器的設(shè)計(jì)
由系統(tǒng)(8)可知,系統(tǒng)有3個(gè)控制量,,根據(jù)基于微分幾何狀態(tài)反饋精確線性化理論,應(yīng)選擇3個(gè)輸出函數(shù)。結(jié)合本文的控制目標(biāo)——同時(shí)減小風(fēng)電系統(tǒng)的功率和轉(zhuǎn)速波動(dòng),因此本文選擇輸出函數(shù)如下:*

式中:Pe為風(fēng)電系統(tǒng)電功率,忽略一切損耗的前提下有:Pe=Temω;P*e為發(fā)電機(jī)額定輸出功率;ω*為風(fēng)力機(jī)額定轉(zhuǎn)速。
另外,為了達(dá)到完全精確線性化的目的,選擇輸出函數(shù)h3(x)=Δidr-i*dr,i*dr的值可以由負(fù)荷的無功功率需求計(jì)算得到。
輸出函數(shù)確定后,根據(jù)狀態(tài)反饋線性化理論可得到系統(tǒng)(8)的閉環(huán)控制律為:

為方便敘述,將這一控制策略命名為多指標(biāo)控制(MC),控制器結(jié)構(gòu)如圖3所示。
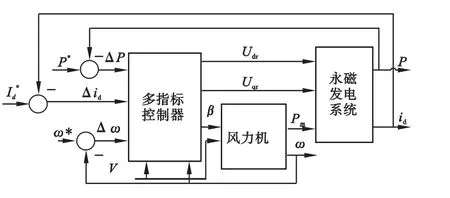
圖3 多指標(biāo)控制系統(tǒng)框圖
4 仿真分析
本文研究的重點(diǎn)是在風(fēng)電系統(tǒng)額定風(fēng)速以上時(shí),同時(shí)減小功率和轉(zhuǎn)速的波動(dòng),仿真參數(shù)選擇如下:P*=2MW,Us=4kV,ω*=2.18rad/s,rs=0.08,Ld=Lq=334mH,J=5000,R=36m,ρ=1.205kg/m3,pn=11,f=50Hz,v=10.8m/s。
功率利用系數(shù)Cp與葉尖速比λ和葉片槳距角β的函數(shù)為;
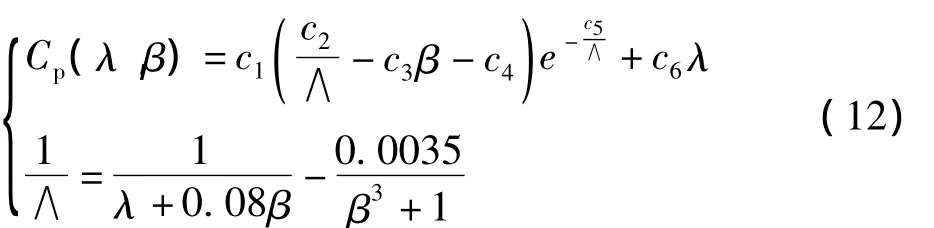
上式中;c1,c2,c3為常數(shù)。
由于槳葉慣性大,為減少調(diào)節(jié)器的疲勞和限制槳距角的變化速率。本文中,參考槳距角在(0°~90°)的區(qū)域內(nèi)變化,槳距角變化率設(shè)定在(-5°/s~+5°/s)范圍內(nèi)。
圖4為仿真所采用的風(fēng)速波形,圖5~7顯示了在給定風(fēng)速下,僅考慮槳距角控制(BC)、僅考慮電磁轉(zhuǎn)矩控制(TC)和本文所設(shè)計(jì)的多指標(biāo)控制策略(MC)實(shí)現(xiàn)恒功率控制時(shí)的風(fēng)力機(jī)轉(zhuǎn)速和輸出功率的仿真結(jié)果。
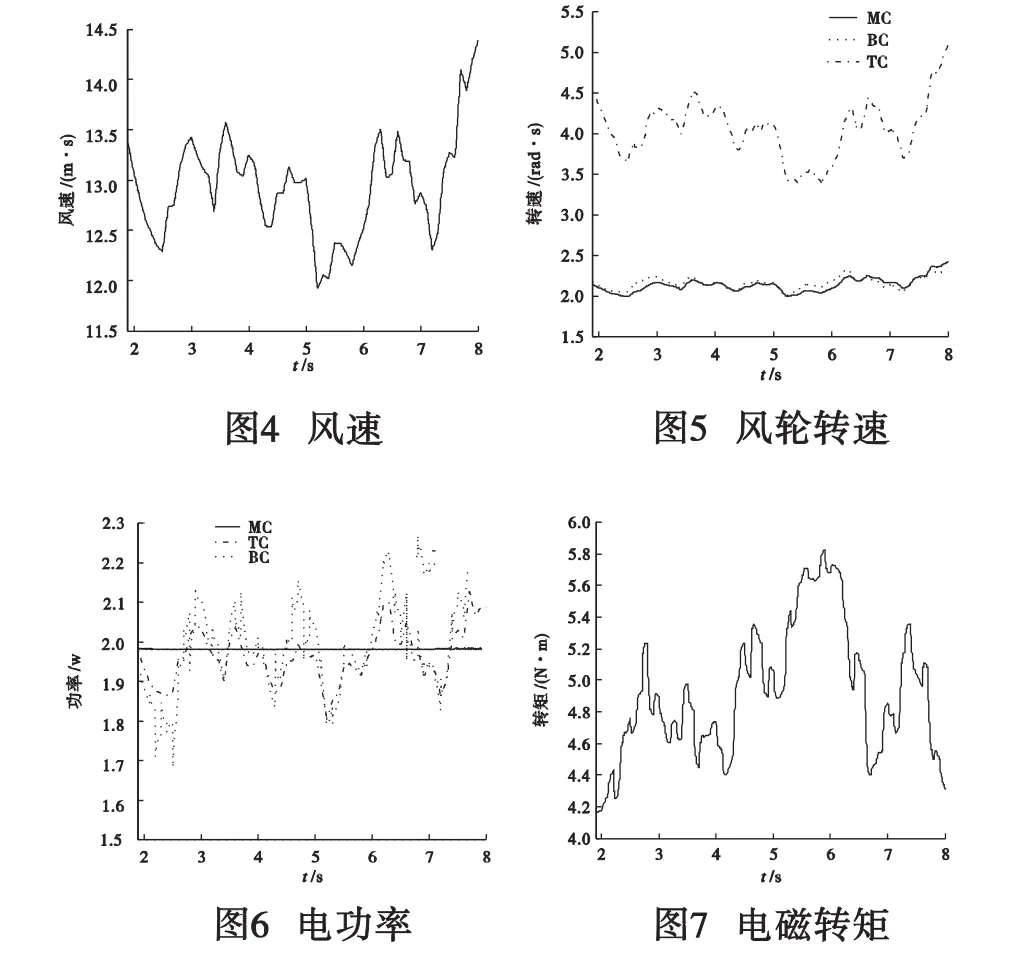
圖5~7中的BC控制為僅僅考慮了槳距角時(shí)的恒功率控制策略,TC控制為僅僅考慮了電磁轉(zhuǎn)矩時(shí)的恒功率控制策略,圖7為僅考慮電磁轉(zhuǎn)矩控制時(shí)的輸出電磁轉(zhuǎn)矩。
(1)由圖5可知,僅考慮電磁轉(zhuǎn)矩控制時(shí),系統(tǒng)轉(zhuǎn)速波動(dòng)較大。這是因?yàn)橄到y(tǒng)輸入的機(jī)械能增加(或減少),而系統(tǒng)的輸出功率維持不變,多余的能量必然會(huì)去增加(或減少)轉(zhuǎn)速,從而導(dǎo)致轉(zhuǎn)速的大幅度變動(dòng)。
(2)由圖6可知,僅考慮槳距角控制時(shí)系統(tǒng)的功率波動(dòng)較大。其主要原因在于:電磁轉(zhuǎn)矩被設(shè)定為額定值不變,風(fēng)速變化所引起的系統(tǒng)輸入機(jī)械能的變化需要由槳距角的調(diào)節(jié)來維持穩(wěn)定,而槳距角的響應(yīng)速度較慢,因此在槳距角的響應(yīng)過程中不可避免地出現(xiàn)功率波動(dòng)。
(3)對(duì)比圖7和圖5中TC控制下的轉(zhuǎn)速變化趨勢(shì)可知,電磁轉(zhuǎn)矩的變化與轉(zhuǎn)速變化的趨勢(shì)是相反的。這是因?yàn)轱L(fēng)速變化將引起系統(tǒng)轉(zhuǎn)速的變化,而為了維持輸出功率不變,電磁轉(zhuǎn)矩必然與轉(zhuǎn)速成反方向變化,這也從另一個(gè)角度解釋了僅靠調(diào)節(jié)電磁轉(zhuǎn)矩不能夠維持轉(zhuǎn)速穩(wěn)定的原因。
(4)對(duì)比圖5和圖6可知,與僅考慮槳距角和僅考慮電磁轉(zhuǎn)矩調(diào)節(jié)的恒功率控制策略相比,本文所提出的多目標(biāo)控制策略不僅能夠很好地維持系統(tǒng)輸出功率的恒定,而且還能夠有效減少系統(tǒng)的轉(zhuǎn)速波動(dòng)。其原因在于:電磁轉(zhuǎn)矩的迅速調(diào)節(jié)可以有效減少風(fēng)速變化所引起的功率變化,而槳距角的調(diào)節(jié)又可以調(diào)節(jié)輸入系統(tǒng)的機(jī)械功率,從而使得系統(tǒng)的轉(zhuǎn)速波動(dòng)減小。
5 結(jié)論
本文分析了傳統(tǒng)的控制策略—電磁轉(zhuǎn)矩控制和槳矩角控制的優(yōu)缺點(diǎn)。上述兩種控制方法都考慮了風(fēng)電系統(tǒng)高風(fēng)速區(qū)域時(shí)的功率限制策略,但是忽略了對(duì)系統(tǒng)轉(zhuǎn)速的控制。為了達(dá)到同時(shí)減小風(fēng)電系統(tǒng)高風(fēng)速區(qū)域下的功率和轉(zhuǎn)速波動(dòng)的目的,本文設(shè)計(jì)了新的控制策略,即通過同時(shí)調(diào)節(jié)槳距角和電磁轉(zhuǎn)矩來實(shí)現(xiàn)風(fēng)電系統(tǒng)恒功率和轉(zhuǎn)速穩(wěn)定的多指標(biāo)控制。Matlab/simulink仿真證明了該控制策略的有效性和正確性。
[1] 田友飛,李嘯驄,徐俊華,等.變速恒頻雙饋風(fēng)電機(jī)組最大風(fēng)能捕獲非線性控制策略[J].電力系統(tǒng)自動(dòng)化,2011,35(11).
[2] 薛娟妮,直驅(qū)風(fēng)電系統(tǒng)最大功率捕獲技術(shù)的仿真研究[D].廣西大學(xué),2008 -11.Xue Juan-ni.Direct-drive wind power system simula.
[3] 姚紅菊,趙斌.變速恒頻風(fēng)電機(jī)組額定風(fēng)速以上恒功率控制[J].能源與環(huán)境,2004,5(3):12 -13.
[4] 王彥國.直驅(qū)式風(fēng)力發(fā)電系統(tǒng)及其控制策略[D].華北電力大學(xué)(北京)2009-08.
[5] Chinchilla M,Arnaltes S,Burgos JC.“Control of permanent-magnet generators applied to variable-speed wind-energy systems connected to the grid,”Energy Conversion,IEEE Transactions on,vol.21,no.1,pp.130 -135,March 2006.
[6] 李嘯驄,程時(shí)杰,韋化,等.輸出函數(shù)在多輸入多輸出非線性控制系統(tǒng)設(shè)計(jì)中的重要作用[J].中國電機(jī)工程學(xué)報(bào),2006,26(9):87-93
[7] 盧強(qiáng),梅生偉,孫元章.電力系統(tǒng)非線性控制[M].2版.北京:清華大學(xué)出版社,2008,10.
[8] 廖勇,何金波,姚駿,等.基于變槳距和轉(zhuǎn)矩動(dòng)態(tài)控制的直驅(qū)永磁同步風(fēng)力發(fā)電功率平滑控制[J],中國電機(jī)工程學(xué)報(bào),2008(18).
[9] 陳思哲,吳捷,姚國興,等.基于微分幾何的風(fēng)力發(fā)電機(jī)組恒功率控制[J].控制理論與應(yīng)用,2008,25(2):336 -340.
[10] 張博.風(fēng)力發(fā)電及風(fēng)力機(jī)模擬系統(tǒng)的研究[D].華北電力大學(xué),2010.
[11] 胡雪松,孫才新,廖勇,等.直驅(qū)永磁同步風(fēng)力發(fā)電機(jī)轉(zhuǎn)矩動(dòng)態(tài)滑模控制策略研究[J].重慶大學(xué)學(xué)報(bào)(自然科學(xué)版).
[12] 尹明,李庚銀,張建成,等.直驅(qū)式永磁同步風(fēng)力發(fā)電機(jī)組建模及其控制策略電網(wǎng)技術(shù)[J],2007(15).
[13] Mansour M,MansouriM N,MimouniM F.“Study of performance of a variable-speed wind turbine with pitch control based on a Permanent Magnet Synchronous Generator,”Systems,Signals and Devices(SSD),2011 8th International Multi-Conference on,vol.,no.,pp.1 -6,22 -25 March 2011.
Multi-index Nonlinear Control of Constant Power Output for the Permanent M agnet W ind Turbine Generation
ZHAO Ya-nan,WU Xin,LIANG Jian-hua,LIN Chun-ying
(College of Electrical Engineering,Guangxi University,Nanning 530004,China)
This paper discusses direct drive permanentmagnetwind generatation(PMSG)'S nonlinear control problem above the rated wind.The traditional controlmethod is using variable pitch wind turbines or regulating the electromagnetic torque to smooth power.Both of the two controlmethods considered the problem of power limitation,but the speed control is ignored.In order to effectively reduce the fluctuation of power and speed during the high wind speed region,this paper based on the established nonlinearmathematicalmodel for the wind system,takes advantage of the differential geometry state feedback linearization,designes a new control strategy,that is,through adjust pitch Angle and electromagnetic torque at the same time to realize power and speed's stability which is the heart of themulti-objective control strategy,Simulation results show that this control strategy is correct and effective.
PSMG;pitch angle;electromagnetic torque;feedback linearization;nonlinear controller
TM57
B
1004-289X(2013)03-0020-05基金項(xiàng)目:國家自然科學(xué)基金資助項(xiàng)目(51267001);
2013-03-29
趙亞楠(1987-),女,新疆人,工學(xué)碩士研究生,2010年就讀于廣西大學(xué)電力系統(tǒng)及其自動(dòng)化專業(yè),攻讀碩士學(xué)位,研究方向?yàn)殡娏ο到y(tǒng)分析與控制;
吳昕(1983-),男,湖南益陽人,碩士研究生,研究方向:電力系統(tǒng)智能測(cè)量與智能控制、無線傳感器技術(shù)。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
電機(jī)與控制應(yīng)用(2021年12期)2021-02-28 07:55:52
能源工程(2020年6期)2021-01-26 00:55:22
海洋通報(bào)(2020年5期)2021-01-14 09:26:54
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
西南交通大學(xué)學(xué)報(bào)(2016年4期)2016-06-15 20:29:37
