紅外光幕在地鐵屏蔽門障礙物探測中的研究
2013-04-21 01:55:40王瑞峰楊子河孔維珍
傳感器與微系統 2013年3期
關鍵詞:系統
王瑞峰,楊子河,孔維珍
(蘭州交通大學 自動化與電氣工程學院,甘肅 蘭州730070)
0 引言
現有地鐵屏蔽門(PSD)障礙物探測系統主要用于障礙物的探測方法是將門速曲線中預期的電機電流和測量到的電機電流進行的對比而判斷障礙物的所在,任何門速的改變都可以通過門控制單元(door control unit,DCU)中的微控制器使用標準電動機電流去計算障礙物對門施加的壓力,從而探測障礙物所在。當探測到障礙物存在時,微控制器會啟動指定的障礙物探測程序來控制屏蔽門的開關狀態。該控制方案存在以下不足[1]:
1)屏蔽門障礙物探測系統系統所能探測到的最小障礙物的尺寸為4 mm×40 mm,對于這類障礙物,通過門速曲線的改變來探測已經不能滿足精度的要求,如果將精度調高了,當門的實際速度曲線與設定速度曲線不符合時,又會影響門機控制單元對電壓的校正功能。這樣就很難找到一個既能滿足精度要求又能不影響預設門速曲線的平衡點。
2)通過門速度曲線探測障礙物方法中預期電機的電流對應于一定的夾緊力,在地鐵驗收過程中使用4 mm×40 mm的鋼條來檢測的目的就是通過鋼條的剛性來感知該鋼條對屏蔽門施加的壓力。而對于質地較軟的障礙物,就不能通過該方法進行探測,當有衣服、領帶、背包帶、皮革等障礙物存在時,就容易造成安全隱患。如上海地鐵的1#,2#線屏蔽門中,大部分預期電機電流設置較高,該部分屏蔽門基于歐洲應用交通環境生成,適應于客流不擁擠的情況,在國內應用后屢屢發生夾人事故[2]。
紅外光幕是通過控制系統同時控制紅外發射器發送信號和紅外接收器接收信號,并將接收管探測到的信號反饋給控制系統,這樣就形成一個保護回路。如果該回路出現故障,紅外光幕就會發出報警,因而,它是一種失效安全的保護裝置[3]。本文利用紅外光幕設計了一種適合屏蔽門障礙物探測的方案,并結合數字信號處理器(DSP)的無刷直流電機控制技術和模糊PID控制算法,完成屏蔽門障礙物探測的設計,為進一步研究該方案的可行性應用提供了有效的科學依據。
1 紅外光幕探測原理
構成紅外光幕的紅外光束示意圖如圖1所示,其中,圖1(a)為直線掃描模式下的光束示意圖;圖1(b)為交叉掃描模式下的光束示意圖。
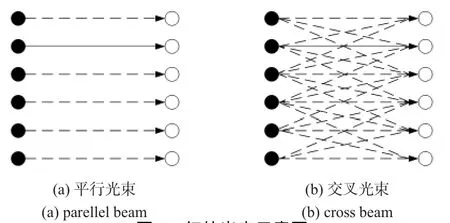
圖1 紅外光束示意圖Fig 1 Diagram of infrared beams
在直線掃描情況下,控制系統只接收與紅外發射管相對應的紅外接收管的信號。當控制系統以一定的周期對每一對紅外發射管和紅外接收管進行循環掃描時,就形成了一條條平行的紅外光束組成的紅外保護光幕。該情況下平行光束之間的距離,即為掃描盲區。由于紅外發射管的出射光不是像激光一樣的直線,而是有較大的發射角,雖然與之對應的接收管接收到了其中的一條或多條光束,但其余光均能投射在相鄰的一組或多組紅外接收管上,若在一個紅外發射管發射時,控制多個紅外接收管依此接收該發射管發射的光束,并周期性地對每條光束進行循環掃描,就形成了圖1(b)所示的交叉掃描方式。直線掃描方式由于光束少而存在較大掃描盲區,而交叉掃描方式有了交叉光束,就可以用較少的紅外發射管和紅外接收管,組成較密集的保護光束,有效地減少了探測盲區,形成一道隱形的紅外保護光幕。
圖2給出了相鄰2對發射管互不干擾條件下的光束示意圖。
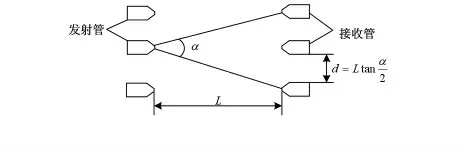
圖2 相鄰2對發射管互不干擾條件Fig 2 Conditions of two pairs adjacent transmitting tube without mutual interference
當已知發射管的發射角為α,發射管與接收管之間的距離為L,則可以通過式(1)推導出2組紅外光對射管互不干擾的最小距離d,即

另外,在已知發射管直徑Φ的前提下,可以計算出安全光幕的分辨率為

式中D為安全光幕所能探測到的最小障礙物的尺寸。
紅外光幕的紅外發射和接收通路數目理論上最大可有215個[4],考慮到地鐵屏蔽門的高度和紅外光幕上下通路之間的間距,一般不會超過64個;而地鐵屏蔽門的有效探測區域為1 900 mm(寬)×2 000 mm(高),故紅外光幕能探測到的最小障礙物直徑約為30 mm。
2 地鐵屏蔽門障礙物探測系統設計
2.1 屏蔽門障礙物探測系統硬件結構設計
地鐵屏蔽門障礙物探測系統硬件結構如圖3所示。
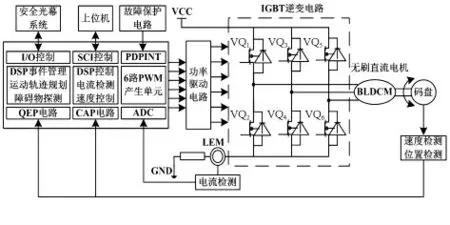
圖3 屏蔽門障礙物探測系統硬件結構Fig 3 Hardware structure of platform screen door obstacle detecting system
其工作原理為:在屏蔽門關門過程中DSP通過I/O口一方面控制紅外光幕執行障礙物探測功能,另一方面采集紅外光幕系統中障礙物的探測信號,并根據所采集的信號,通過其內部的事件管理器選擇所需速度曲線,與此同時,DSP還通過捕獲單元捕捉霍爾傳感器所探測的轉速脈沖信號的寬度[5],從而計算出電機的轉速,并與所選速度曲線比較后,利用模糊PID控制算法產生合適的正弦波脈寬調制(SPWM)信號,給驅動電路提供合適的驅動邏輯電平,控制電機的轉速跟隨所選速度曲線的設定值進行平滑調速;此外,DSP還經I/O和A/D口采集外部輸入信號(如過電流保護信號、過電壓保護信號、過溫保護信號),實時控制電機的運轉狀態,當采集到系統運行異常時會及時中斷電機運行并發出聲光報警提示;以及通過SCI口將系統的狀態信息通過CAN總線傳輸給上位機,為系統提供遠程監控的窗口。
2.2 系統控制策略的設計
系統軟件實現全數字雙閉環控制,內環是電流環、外環是速度環。其中,速度環控制器采用模糊PID控制算法;電流環控制器采用PID控制算法;這樣就可以使電流緊緊跟隨速度控制器的輸出,防止系統擾動。系統中PWM占空比的控制量是先通過給定轉速與速度反饋量比較后形成偏差,經速度環控制器調節后產生電流參考量,然后與電流反饋量比較并形成偏差,最后經電流環調節器調節后形成。系統通過速度環的模糊PID控制算法和電流環的PID控制算法的有效結合,使系統具有較強的魯棒性和適應性,確保速度主被控量的控制質量[6]。系統控制策略框圖如圖4所示。
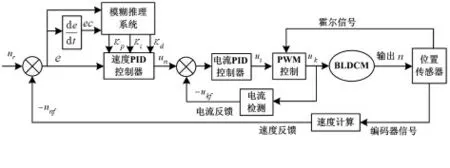
圖4 系統控制策略框圖Fig 4 Block diagram of system control strategy
2.3 模糊控制器設計
從圖4可以看出:速度環控制器的給定轉速值nr和反饋轉速值nnf的偏差e和偏差變化率ec作為模糊控制器的輸入,并利用模糊規則進行模糊推理,對在線PID參數進行修改,然后,以Kp,Ki,Kd作為輸出,并通過速度PID控制器產生電流參考量,與電流環的反饋值比較和形成偏差,從而實現電流環的PID控制。在運行中系統自動找出PID與偏差e和偏差變化率ec的模糊關系,并不斷檢測e和ec,再根據模糊控制控制原理對這3個參數進行在線修正,以滿足不同的e和ec下被控過程對ΔKp,ΔKi,ΔKd的要求。
在建立模糊規則時,可將速度偏差e和偏差變化率ec量化為7個模糊子集,即模糊語言變量={負大,負中,負小,零,正小,正中,正大},簡記{NB,NM,NS,ZE,PS,PM,PB}[7]。綜合考慮速度偏差e和速度偏差變化率ec這2個信號,可采用如下的模糊推理規則:
if Eis NB and EC is NB then Kpis PB,Kiis NB,Kdis NS.
由于e和ec各有一個模糊子集。所以,共有49條模糊規則,其具體規則如表1所示。
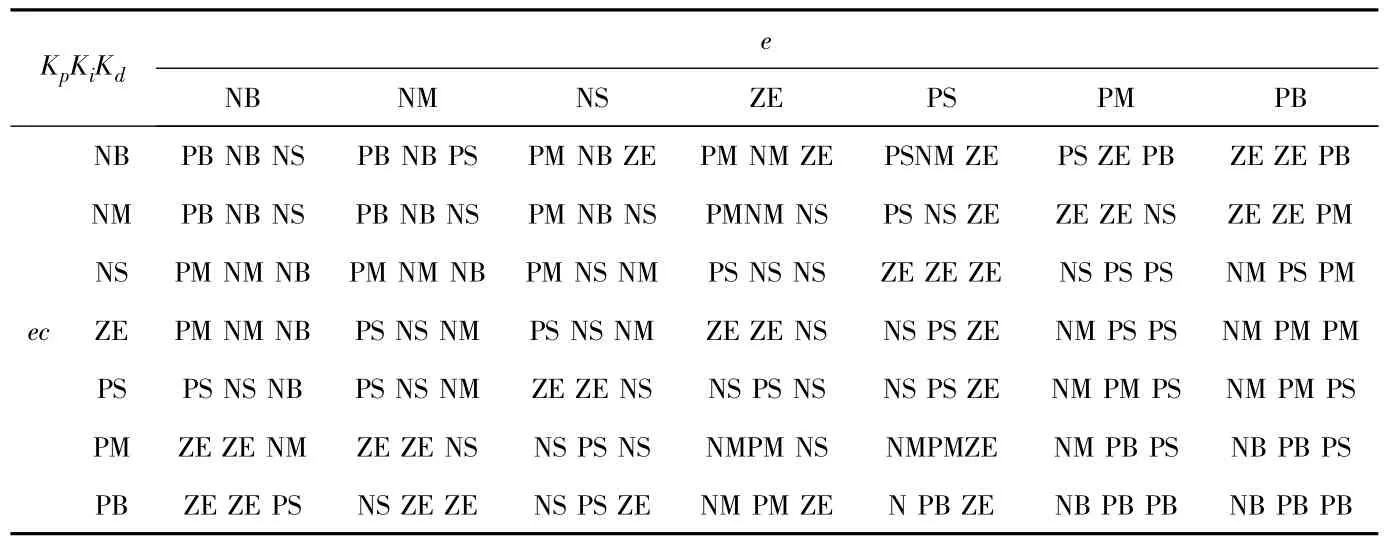
表1 模糊控制規則表Tab 1 Fuzzy control rules table
Kp,Ki,Kd的模糊控制規則表建立好后,可采用加權平均法計算出輸出量ΔKp,ΔKi,ΔKd的確定值,并代入式(3)計算

式中Kp0=0.5,Ki0=0.03,Kd0=0.1為用工程經驗法整定出的初值。
在連續時間域上,PID控制器具有如下形式[8]
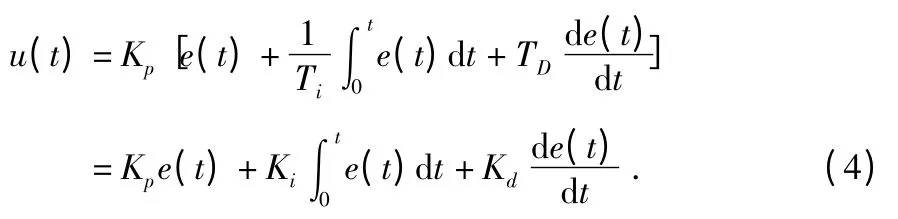
將式(4)離散化,用寬為Td,高為e(iTd)(i=0,1,2,…,Td為采樣間隔)的小矩形面積和近似代替積分,可得離散線性PID控制器的遞歸方程為


式中Kpd=Kp,Kid=KpTd/Ti和KDd=KpTd/TD分別為相應的比例、積分、微分增益常量。
PID控制器的離散形式式(5)不易于實現,因為它包含所有以前時刻的控制誤差值求和,較好的解決辦法是采用增量式作為控制器的輸出,即

式中un為速度控制器輸出的控制量,Ki=KpT/Ti,Kd=KpTd/Ti,T=10 ms。
在線性運行過程中,控制系統通過邏輯運算得出Kp,Ki,Kd的值并完成對PID參數的在線自校正。
3 系統仿真結果與分析
在本系統中,通過Matlab/Simulink工具中的功能模塊和C MEX S函數及子系統封裝等模型優化技術構建了系統主要控制模型,包括速度給定模塊、模糊PID控制模塊、電機控制模塊,PWM發生模塊、功率驅動模塊、無刷直流電機的模快、反電動勢模塊等,通過這些模塊及其函數構建出地鐵屏蔽門障礙物探測系統模型,并對系統正常關門過程和遇障礙物時的關門過程進行仿真。系統所用無刷直流電機的仿真參數如表2所示。
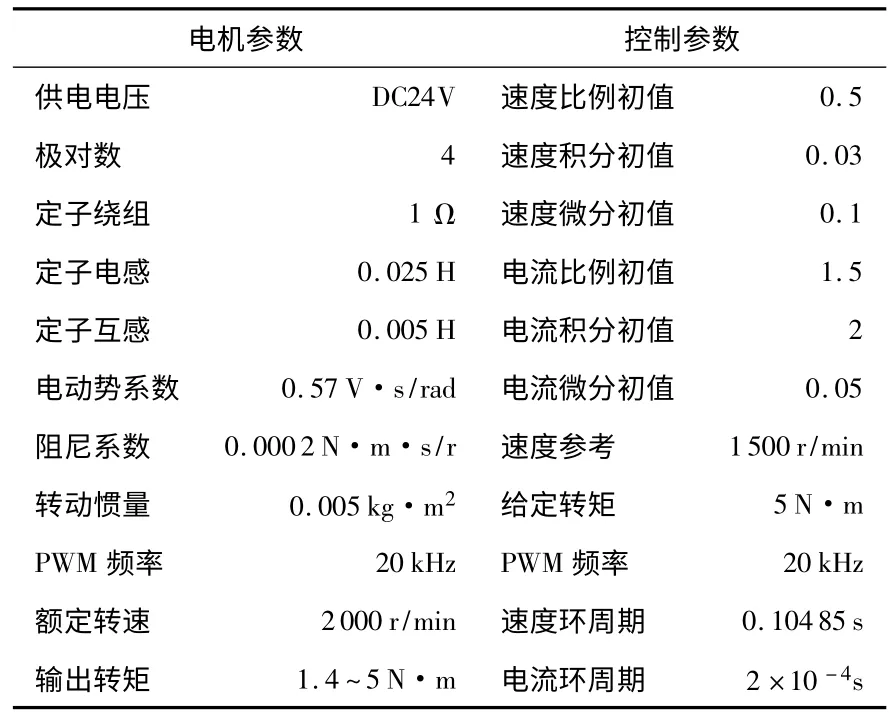
表2 無刷直流電機模型仿真參數Tab 2 Simulation parameters of BLDCM model
系統的仿真結果如圖5所示。從圖5(a)中的系統正常關門時的速度曲線中可以看出:使用傳統PID對系統進行控制時的超調量比使用模糊PID控制時的超調量要大,超調時間(傳統PID控制為1 194 ms,模糊PID控制為598 ms)也要高出近1倍,而超調量和超調時間是評定一個閉環實時控制系統“穩、快、準”的關鍵指標。在屏蔽門障礙物探測系統中采用模糊PID控制算法不僅提高了系統對無刷直流電機的控制精度,另一方面,由于系統的響應時間的縮短,也節約了障礙物探測過程所需的時間,從而間接地提高了障礙物探測的精度;另外,從整個曲線可以看出:使用模糊PID控制時,系統能夠很好地跟隨給定速度曲線進行調速控制。圖5(b)給出了系統在遇到障礙物且障礙物一直存在時的關門速度曲線的仿真圖,該曲線主要通過編程實現速度的給定來驗證系統在遇到障礙物時的關門流程,從而證明系統在遇到障礙物時能通過運行障礙物探測程序實現障礙物的智能探測。
4 結束語
本文在分析現有地鐵屏蔽門障礙探測系統所存在的不足和安全光幕探測原理的基礎上,提出采用安全光幕進行地鐵屏蔽門障礙物的探測方法來解決對尺寸小于4 mm×40 mm的細軟障礙物探測的不足;同時,結合DSP的控制技術和模糊PID控制算法實現整個屏蔽門障礙物探測系統的設計,重點對模糊PID控制器的設計進行了研究;最后,在Matlab/Simulink環境中構建了整個系統的數學模型,并對系統在正常情況和遇到障礙物時的關門過程進行仿真分析。仿真結果表明:與傳統PID控制相比,模糊PID控制具有較小的超調量和超調時間,而且系統能很好地跟隨給定速度進行調節控制,不僅滿足了實時控制系統“穩、快、準”的要求,而且還間接提高了地鐵屏蔽門障礙物探測的精度。
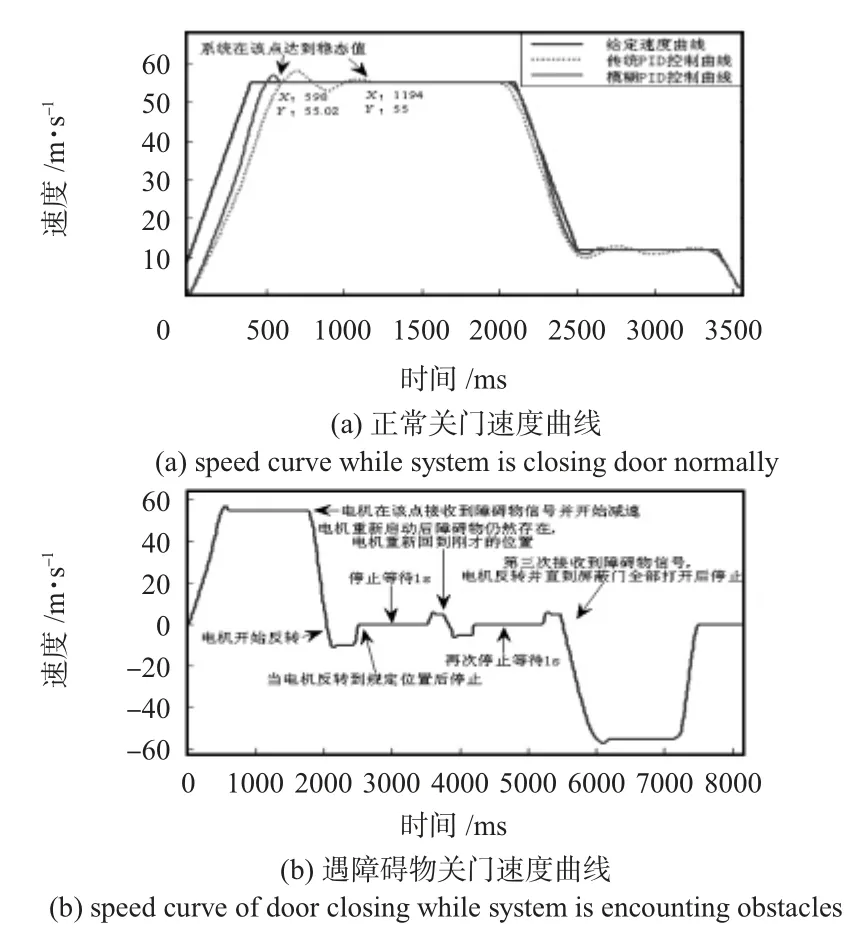
圖5 系統在正常情況和遇障礙物時的關門速度曲線Fig 5 Curve of system door closing speed in the situation of normal and encounter obstacles
[1]葉宏.地鐵屏蔽門障礙物探測方案的探討[J].工業控制計算機,2008,21(7):68-69.
[2]鄧遠華,宋瑞剛.地鐵站臺“二門系統”防夾人事故措施探討[J].沿海企業與科技,2010(10):43-44.
[3]許薇,楊衛.一種紅外傳感器陣列探測方法的研究[J].傳感器與微系統,2009,28(9):16-18.
[4]陶志福.用51系列單片機設計物體分級設備的測量光幕[J].國外電子元器件,2004(7):64-66.
[5]張欣,王云寬,范國梁,等.軌道交通門機控制系統驅動控制器關鍵問題的研究[J].鐵道學報,2008,30(5):57-61.
[6]劉金琨.先進PID控制及其Matlab仿真[M].北京:電子工業出版社,2003.
[7]Triem T H,Tamara A O.Design optimization of a hydrogen advanced loop heat pipe for spacebased IR sensor and detector cry cooling[J].SPIE,2003,5172:1120-1131.
[8]Visioli A.Tuning of PID controllers with fuzzy logic[C]∥Proc of IEEE Int’l Conf on Control Theory and Application,2001:69-81.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
