GPS/DR組合導航系統線性模型的研究與實現
2013-04-07 07:46:16金亮良何文濤徐建華
測繪通報 2013年1期
金亮良,何文濤,徐建華,2
(1.中國科學院微電子研究所,北京 100029;2.杭州中科微電子有限公司,浙江杭州 310053)
一、引 言
航位推算(dead reckoning,DR)與GPS衛星導航組合在一起,可以提高導航精度。傳統的GPS/DR組合導航系統的量測方程為非線性,因此常采用擴展卡爾曼濾波(EKF)來融合兩個系統的測量值[1]。由于EKF存在一定的問題,如非線性系統不方便或不能夠進行雅克比矩陣的求解,泰勒級數線性化為近似過程等[2]。針對EKF的缺點,提出了無損卡爾曼濾波(UKF)[3]、粒子濾波[4]等算法。但是以上算法都或多或少地存在如計算量較大等問題。若能將系統設計成線性化,即可以提高導航精度并減小系統設計的復雜性。
二、基于單陀螺儀單加速度計的線性系統設計
1.系統模型的建立
GPS/DR組合導航非線性系統的建模方式可以參考文獻[1]。利用DR推算短時、精度高的特點,將DR推算的力學編排作為狀態方程,GPS的位置和速度測量值作為量測方程的輸入,采用包含位置和速度作為狀態量的標準卡爾曼濾波(PV-SKF),構造成GPS/DR松耦合組合導航系統。針對單陀螺儀單加速度計的航位推算系統,建模如下:
1)系統的狀態方程可表示為
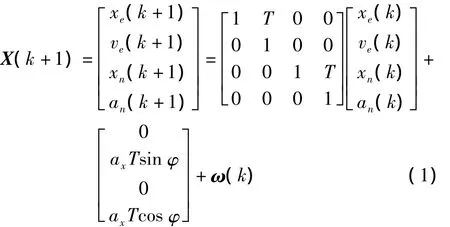
式中,xe、ve分別為載體東向位移、速度;xn、vn分別為載體北向位移、速度;T為離散化步長;ω為系統狀態的過程噪聲向量;ax為加速度的測量輸出;φ0為航向角,φn=φn-1+ωT;ω為陀螺儀的輸出。
2)系統的觀測方程可表示為[5]
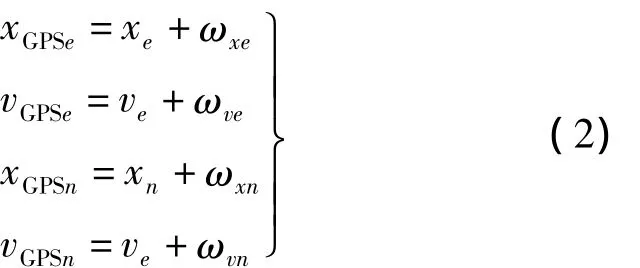
式中,xGPSe、vGPSe為 GPS 東向位移和速度;xGPSn、vGPSn為 GPS 北向位移和速度;ωxe、ωve、ωxn和ωvn分別為GPS東向位置、東向速度、北向位置和北向速度的觀測噪聲。
3)觀測噪聲Wk的協方差矩陣R為

2.系統模型的改進
在上文中,系統的狀態量不包括東西向的加速度,現引入東西向的加速度作為系統的狀態量,量測方程參考文獻[4]。采用PVA-SKF,則系統的狀態方程可表示為
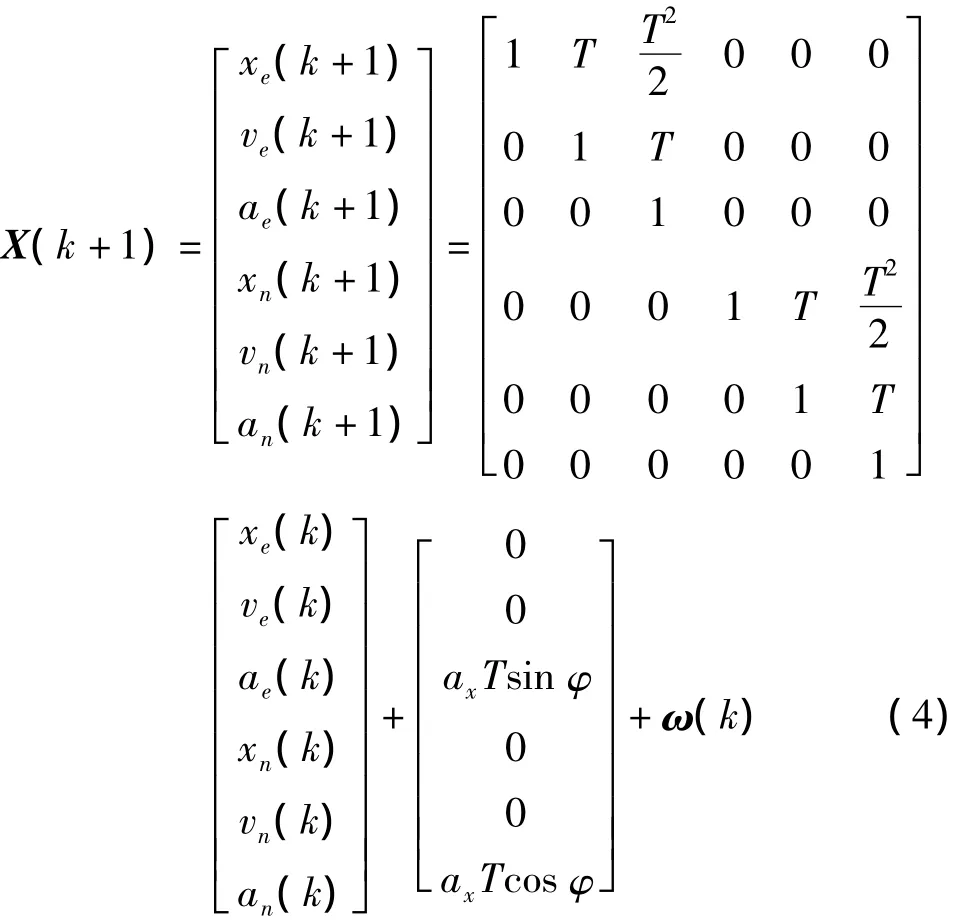
將加速度引入作為狀態量之后,狀態模型能更好地反映實際情況,從而提高導航精度。
三、仿真和測試結果
設計載體運動的仿真軌跡,圖1為設計的仿真軌跡。
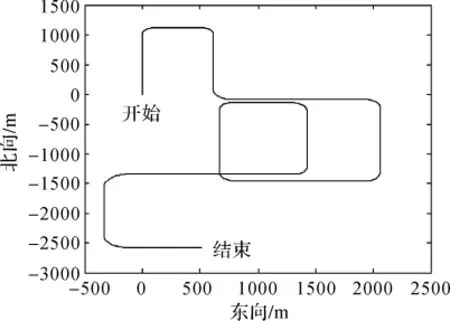
圖1 載體運動模擬軌跡
假設GPS東西邊的定位誤差都是10 m,且是高斯白噪聲,組合導航算法比GPS單獨導航精度要高,如圖2所示。3種組合導航算法的性能比較如圖3和表1所示。
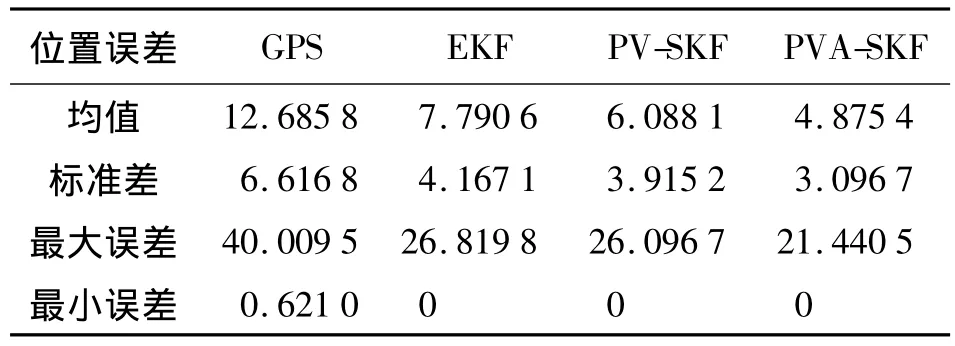
表1 不同算法的位置誤差統計特性比較 m
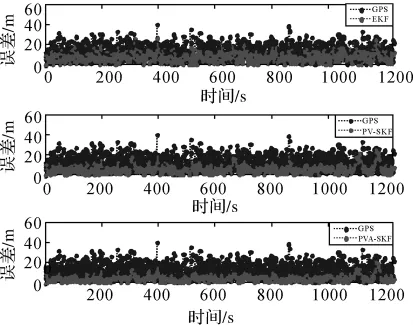
圖2 GPS分別與3種組合導航算法的位置誤差比較
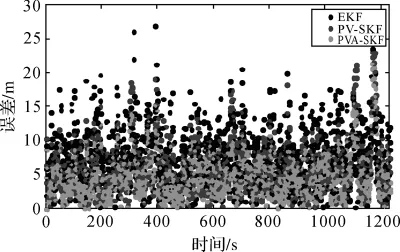
圖3 3種組合導航位置誤差比較
如表1所示,無論是位置誤差的均值、標準差還是最大誤差值,PVA-SKF都是最小的,說明其性能好于EKF和PV-SKF,且PV-SKF的性能優于EKF。
實際測試選用的GPS導航模塊為杭州中科微電子的ATGB11模塊,慣性傳感器為ADI公司的ADIS16365,選取ADIS16365的Z軸陀螺儀和X軸加速度計。慣性傳感器采樣率為50 Hz,GPS定位輸出頻率為1 Hz,GPS/DR組合導航定位輸出為1 Hz。圖4為實際的測試結果,PVA-SKF的定位結果比EKF算法更符合實際。
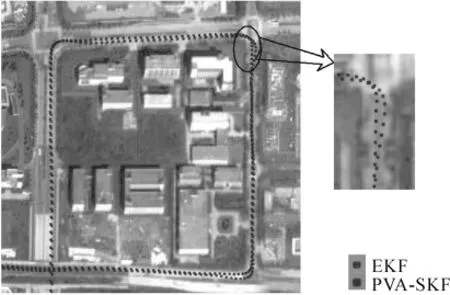
圖4 實際的測試結果
四、結束語
GPS/DR組合導航的數據融合方式一般采用EKF。但是EKF存在許多缺點,為了克服這些缺點,提出一種線性化的模型,且用PV-SKF進行濾波,接著提出改進的模型,利用PVA-SKF進行濾波。經過計算機仿真,驗證線性化模型改善了原先非線性模型結構復雜的缺點,同時還提高了導航性能,且改進的算法(PVA-SKF)有更好的性能。
[1] 謝鋼.GPS原理與接收機設計[M].北京:電子工業出版社,2009.
[2] 楊曉云,何恒,施滸立.車輛GPS/DR組合導航系統的研究[J].測繪通報,2007(9):1-3.
[3] SEONG Y C,WAN S C.Robust Positioning Technique in Low-cost DR/GPS for Land Navigation[J].IEEE Transcations on Instrumentation and Measurement,2006,55(4):1132-1142.
[4] 朱虹,關桂霞,田健仲,等.基于UKF的GPS/DR組合導航非線性狀態估計[J].計算機應用與軟件,2008(12):84-137.
[5] 趙超凡,付夢印,張繼偉.低成本組合導航系統濾波算法的研究[J].微計算機信息,2007(2):215-217.
[6] 賈繼超,吳訓忠,夏加和,等.一種車輛航位推算改進方法[J].中國慣性技術學報,2009(4):453-455.
[7] SAURABH G.Preformance Evaluation of Low Cost MEMS-based IMU Integrated with GPS for Land Vehicle Navigation Application [D]. Calgary: University of Calgary,2006.
[8] 房建成,申功勛,萬德鈞.一種自適應聯合卡爾曼濾波器及其在車載GPS/DR組合導航系統中的應用與研究[J].中國慣性技術學報,1998,6(4):1-6.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(2016年9期)2016-02-27 09:05:39
