蛇形機器人的運動分析以及步態研究
2013-03-28 01:53:06譚啟明何振勇陳然
電子設計工程 2013年11期
譚啟明,何振勇,陳然
(華南理工大學廣東廣州510640)
蛇的生存環境是非常多樣化的:森林、沙漠、山地、石堆、草叢、沼澤甚至湖泊。它獨特的蜿蜒爬行方式使其在各種生態條件下都隨遇而安、運動迅速自如。適合在水下地下管道,凹凸不平的表面,墻壁之間的狹小裂縫,橋梁纜索等特殊環境下作業、具有廣泛的應用前景。文中提出了一種7關節6連桿的蠕動仿生蛇形機器人,其為行波傳遞運動方式,下面我將對這種機器人進行研究。
1 蛇形機器人的模型結構設計與步態研究
每個關節長度為:a,質量為:m,初步模擬有7個關節。電機減速器安裝在其軸線上,桿件的重量相當于關節來說可以忽略不計,因此轉軸中心作為桿件的質心,其在表面上蠕動進行時,它的簡化模型如圖1中的蛇形蠕動前行[1]。(圖2只給出了3節的運動分析)首先研究的是3動桿的運動步態,做模擬的運動圖解如圖1。
首先點P0沿著X軸前進,其他點Pi(i≥2)固定不動;于此同時,桿件P0P1與X軸之間的夾角α從0°到達給定的角度α0。
在初始階段,P0P1和P1P2運動,它們與X軸之間形成等腰三角形,在該階段結束時,三角形的底腳為(圖1中的階段c),除了P1其他點均位于X軸上。
下一階段,P0P1、P1P2和P2P3為動桿,點P0和Pi(i≥3)均保持不動,夾角α從α0變為0°,與此同時P2P3與X軸的夾角β從0°到達給定的角度α0(圖1中的階段d);當這一階段結束時,系統處于狀態e;P1P2、P2P3與X軸之間成等腰三角形,除了P2外,其他點均位于X軸上。
重復以上的過程,將會發現當一個階段完成后,除了三角形的頂點外,其他的點均位于X軸上。頂點和三角形將會逐漸向右移動;最后點P5將會成為三角形的頂點(如圖1中的階段f),夾角α從α0變為0°,整個系統恢復為直線狀態g(如圖1中的階段g)。在這一個運動周期,整個系統沿X軸的位移L等于點P0從α0狀態a到狀態b的位移。因此有:L=2a(1-cosα0)。
其中,a為桿長。
下面我們進行系統的步態分析,為以后的仿真測試做準備,我們把系統桿件的數量設為可擴展的N,進行一個普遍的多桿蛇形機器人的步態分析[2]。
1.1 蛇形機器人的步態與位移分析
從圖2可知,在波形傳遞階段,動點為Pi和Pi+1(1≤i≤N-1),其他點靜止不動,則我們可以將Pi-1Pi、PiPi+1、Pi+1Pi+2簡化為如圖2的連桿機構,Pi+1和Pi+2之間的距離d是固定的,d=a+cosα0,那么波峰過渡階段可劃分為如圖2所示的4個階段,初始位置為圖1中的c階段結束位置為圖1中的過程e。

圖1 蛇形機器人三動桿的步態分析Fig.1 Gait analysis of snake-like robot three moving rod
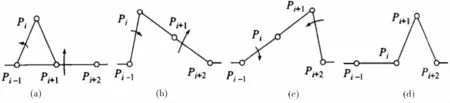
圖2 三桿件的運動的4個狀態Fig.2 Four state of the three rod movement
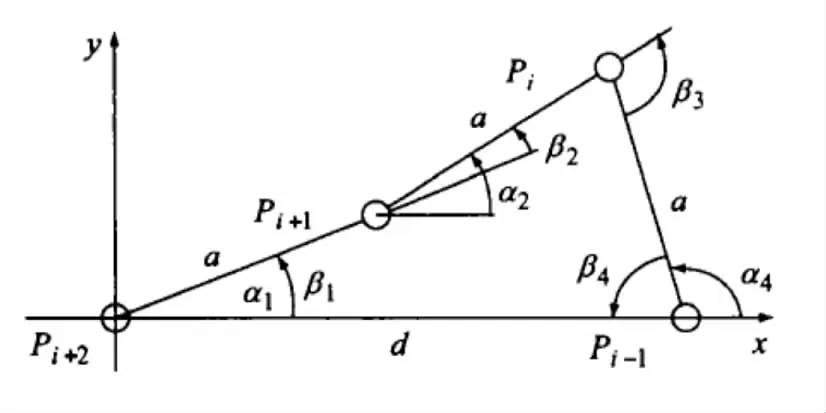
圖3 3桿件的矢量四邊形Fig.3 Three member of the vector quadrilateral
由圖3所示的封閉矢量四邊形Pi-1PiPi+1Pi+2得:

其在X、Y軸上分解得:

消去α4后得:

解出:

式中N為符號系數,ΔPi+1Pi-1Pi三頂點的順序為逆時針方向,N=-1;順時針方向N=1;這是按照右手直角坐標系制定的,如為左手坐標系,則判別N符號的規則上相反。
又由公式(2)可以解得:
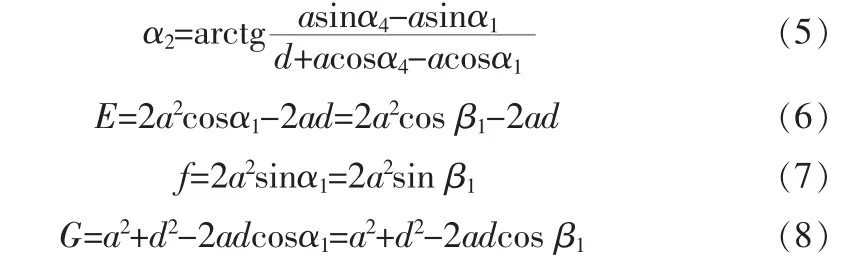
通過式(6)、式(7)和式(8)可以將連桿的各個角度均由β1表示,對研究其角度關系提供基礎。
1.2 蛇形機器人各連桿間的相對角位移
由圖3設各已知Pi+1Pi+2相對Pi+2Pi+3的轉角β1,則各連桿的相對轉角都可用β1來表示,由圖3的幾何關系可以推導出以下的角速度關系式:
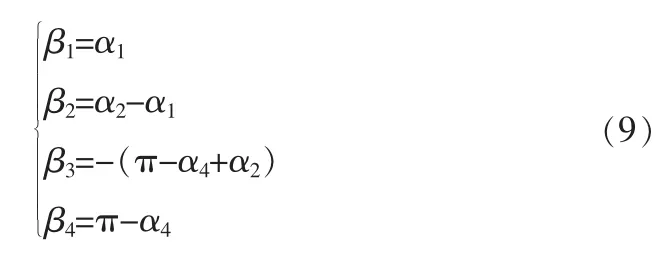
由式9可以得出,各個轉角關系都可以用β1表示,則按照角度設計蛇形機器人的旋轉驅動可以設置轉角β1為變量的函數[3]。
1.3 蛇形機器人設計
有前文推導可以設計蛇形機器人的旋轉函數,只涉及轉角β2與β1,其他連桿由于其為剛性連桿,并且通過旋轉鉸鏈相連,則可以連帶轉動,整個蛇形機器人前進一步的具體設計分為3大部分[4]:
1)過程一:
桿0-1沿著右端點2處旋轉副做向X軸正方向的順時針旋轉,點1不固定在地面上,其他點均施加大的摩擦力固定在地面上,旋轉到桿1-2與X軸負方向成60°時停止轉動,運動的過程中點0設置為高副滑動,如圖4所示。
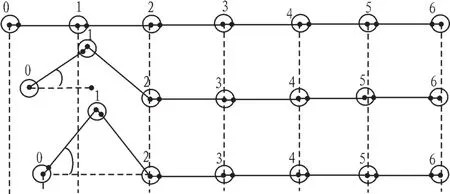
圖4 過程一:步態設計圖Fig.4 Process 1:Gait design
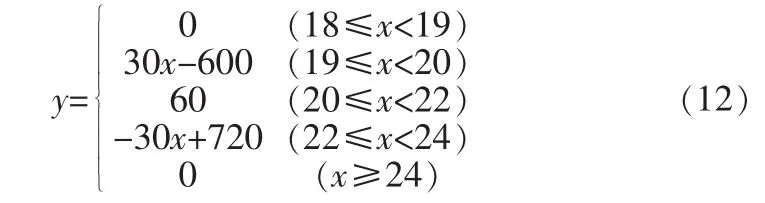
在此過程中,只設計端點1處的旋轉角度的函數,通過此函數,可以使蛇形機器人尾部抬起一定角度。由于研究機器人的步態過程,對其加速度和速度先進行忽略處理,只研究端點1的轉角度數與時間的函數,建立緩慢變化的階躍函數,其函數表達式可以表示為:
y為端點1角度變化(度),x為時間(秒):
在此還要說明的是,在4 s之前,端點2不受函數控制,為自由鉸鏈,在4 s之后執行式12的函數,轉動端點2。
之后的運動,為循環每個端點的階躍函數,定義域一直向后平移,直至蛇形機器人的波形向最后一節移動。
2)過程二:
到最后連桿4-5沿著左邊端點4向X軸正方向做順時針旋轉,最后端點6做與地面接觸的高副運動,如圖5所示。

圖5 過程二:步態設計圖Fig.5 Process 1:Gait design
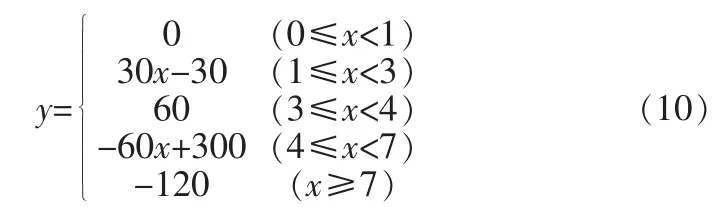
在過程二中,可以只設計端點2處的轉角函數,通過轉動端點2處的角度,其他剛性桿隨之運動,在此過程中端點1處由過程一結束時的銳角變為鈍角(轉過了180°),所以在端點1處的轉角函數處加上式(11)的后兩式,此處端點2的轉角函數與端點1的轉角函數形狀相同,只是定義域向右平移了轉角一運動的一半過程。
y為端點2角度變化(度),x為時間(秒):
在此還要說明的是,在4 s之前,端點2不受函數控制,為自由鉸鏈,在4 s之后執行式(12)的函數,轉動端點2。
之后的運動,為循環每個端點的階躍函數,定義域一直向后平移,直至蛇形機器人的波形向最后一節移動[5]。
3)過程三:
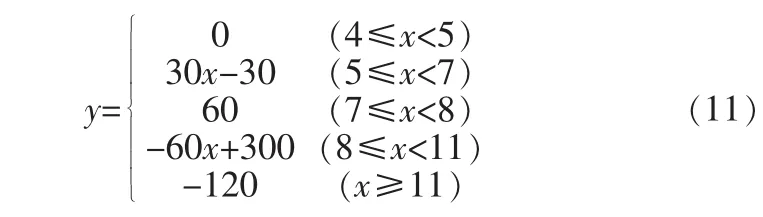
到最后連桿4-5沿著左邊端點4向X軸正方向做順時針旋轉,最后端點6做與地面接觸的高副運動,如圖6所示。
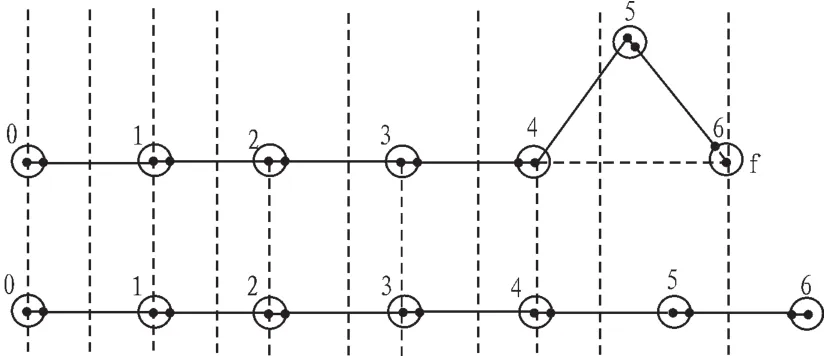
圖6 過程三:步態設計圖Fig.6 Process 1:Gait design
當波形運動到最后一個端點5時,端點5的運動開始時間為20 s,則此端點的轉動角度函數。
y為端點5角度變化(度),x為時間(秒):
最后蛇形機器人的端點全部位于x軸上,蛇形機器人前進一個步態[6]。
2 結束語
文中主要研究了蛇形機器人的一般模型,在這些模型的基礎上,提出了一種行波式的運動模型,對模型的結構建立和步態進行分析及其數學計算,為之后的仿真模型建立了數學基礎。
[1] Bayraktaroglu Z Y.Snake-like locomotion:Experimentations withabiologically inspiredwheel-lesssnake robot[J].Mechanism and Machine Theory,2009,44:591-602.
[2] Prantsch P,Mira T.Control and analysis of the gait of snake robts[C]//In IEEE International Conference OR Control Applications,1999:502-507.
[3]Chernousko F L.Snake-like locomotions of multilink systems,in Virtual Nonlinear Multibody Systems[J].NATO Science Series,2003:452-458.
[4] Tanev I,Ray T,Buller A.Automated evolutionary design,robustness,and adaptation of sidewinding locomotion of a simulated snake-like robot[C]//IEEE Transactions on Robotics,2005,21(4):632-645.
[5] 徐亮,王興松.蠕動機器蛇的仿生設計和運動學分析[J].機電工程技術,2007,36(12):79-83.XU Liang,WANG Xing-song.The peristaltic snake robot bionic design and kinematic analysis of[J].Mechanical&electrical engineering technology,2007,36(12):79-83.
[6] 孫洪.攀爬蛇形機器人的研究[D].上海:上海交通大學,2007.