基于DSP的電動摩托車路況仿真檢測系統研究
2013-08-10 10:22:04黃玉學丁求啟
電子設計工程 2013年11期
黃玉學,丁求啟,陶 敏
(1.天津科技大學 天津 300222;2.中國衛星海上測控部 江蘇 江陰 214431)
由于環境問題和能源短缺,電動摩托車在世界范圍成為研究熱點,控制器是電動摩托車的關鍵技術,但它也是故障率最高的一個部分[1,2]。目前,控制器的質量控制和故障檢測是電動摩托車發展中的一個主要問題,電動摩托車實驗檢測系統的最關鍵兩個因素是無法完全替代實際路檢和無法復現控制器故障[3-5]。一方面,因為這樣的檢測系統對實際行駛過程的仿真程度不夠,也就無法獲得跟實際路檢一樣的工況,導致其檢測結果可信度低,往往只能起到輔助檢測的作用,還必須配合實際路測才能實現可靠的質量檢測。另一方面,電動摩托車控制器的故障往往是在一些特定環境中出現的,有時候是及其個別的、帶有偶然性的,因此故障難以復現,檢測系統同實際路檢仿真程度的差距是導致這個問題的主要因素。針對這個問題,文中設計了路況仿真檢測系統,可以直接對電動摩托車整車的控制目標,如動力性能,節能性能等進行全面的檢測,同時也可以對電動摩托車整車系統進行全面調試和檢測。
1 路況仿真系統結構設計
電動摩托車在實際的行駛過程中,有許多的信息,其中有兩個主要的信息反映了控制器的當前工作狀態,它們是控制器主回路電流和電機當前轉速[6]。控制器主回路電流是電動摩托車在有阻力行駛過程中的主要信息,控制器的發熱、沖擊主要來自于電流變化,這也是控制器最重要技術指標。電機的轉速是電動摩托車在滑行行駛過程中的主要信息。
根據系統要求以及對電動摩托車行駛過程中電機和控制器的狀態分析,設計電動摩托車路況仿真檢測系統的結構,其如圖1所示。電動摩托車仿真檢測系統主要由磁粉制動器、有刷直流電機、無刷直流電機和控制核心板四個部分組成。無刷直流電機就是電動摩托車所用的電機,由系統所檢測的對象控制器進行驅動;磁粉制動器和無刷直流電機同軸安置,利用磁粉制動器實現對無刷直流電機的加載;有刷直流電機與無刷直流電機通過皮帶連接,實現對無刷直流電機的拖動模擬滑行實驗。控制器在整個運行過程中的電流信號、電機的轉速等等都由控制核心板檢測,然后核心板根據一定的控制算法將這些信號處理,得到輸出信號,利用輸出信號控制磁粉制動器和有刷直流電機工作,形成一個閉環系統。
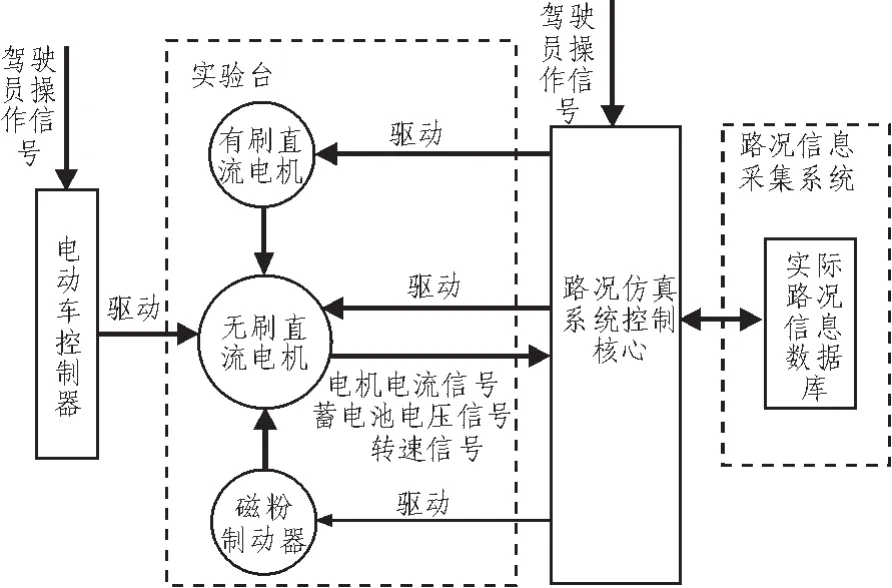
圖1 路況仿真檢測系統結構圖Fig.1 Structure diagram of the real-road condition simulation test system
2 路況仿真檢測系統控制核心板硬件設計
2.1 控制核心板總體結構
路況仿真檢測系統控制核心是系統的控制部件,用來驅動實驗臺工作,實現對電動摩托車實際路況的實驗室內仿真,以替代實車路檢,整個控制核心是依賴于實際路況信息數據庫來運行的,控制核心板首先根據實驗人員的命令從EEPROM中讀取想要進行檢測的路況數據,并將其暫存到RAM區中,這樣才能滿足系統運行時候數據讀取的速度要求,然后再根據實驗人員的指令進行仿真檢測實驗。本控制核心板是由TI公司生產的TMS320LF2407A型DSP(數字信號處理器)芯片為主控芯片的,用于采集輸入信息,計算和輸出各路控制信號,核心板總體框圖如圖2所示。
2.2 信號調理與隔離電路
核心板的驅動信號由DSP芯片輸出,該驅動信號只有+3.3 V的幅值,為弱電信號,要對實驗臺工作部件進行強電控制就需要進行隔離,以免造成電磁干擾甚至造成擊穿,本核心板選用4504型高速光耦和PC817光電耦合器件,可以實現信號隔離,防止電磁干擾,同時還可以起到電平轉換的調理作用。實現DSP電壓的+3.3 V同外圍器件+5.0 V的互相轉換,既保證外圍電路的正常工作,又保護DSP安全工作不被燒毀。
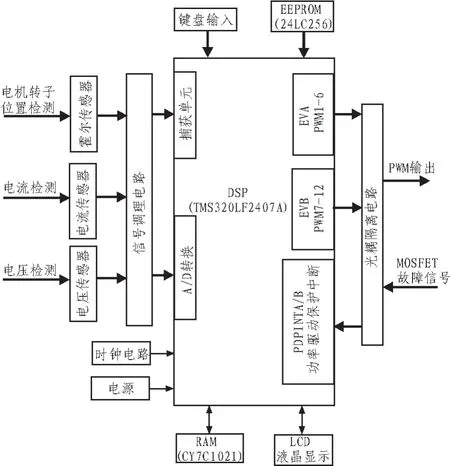
圖2 仿真檢測系統控制核心板框圖Fig.2 Structure diagram of the control core-board of the simulation test system
2.3 電機位置信號檢測電路
無刷直流電動機的位置信號是其控制的主要反饋信息,只有明確轉子的當前位置狀態,根據電動機的導通機制,才能決定下一步的轉子三相繞組的導通邏輯,而且可以根據其變化計算電機轉速。檢測電路如圖3所示。一般霍爾位置傳感器是集電極開路輸出,所以要在檢測環節加上拉電阻。另外,對于編碼信號要根據檢測波形采取一定的硬件濾波和軟件防抖措施。經過電阻上拉和電容濾波后的信號被送到PC817光電耦合器件上的1口,經過+5 V到+3.3 V的電平隔離轉換送入TMS320LF2407A的GPIO口,作為對無刷直流電動機導通邏輯編程的信號,以及用于電機轉速的檢測。
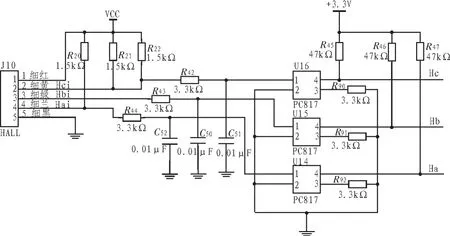
圖3 霍爾位置檢測電路圖Fig.3 Hall position detection circuit
2.4 有刷直流電機驅動電路
控制核心板用于有刷直流電機的驅動電路采用典型的BUCK降壓斬波電路,如圖4所示,由VF7和VF8組成驅動橋,上管VF7用于PWM關斷時候的續流,保證電機能平穩工作,下管VF8由PWM控制,通過PWM占空比的改變實現降壓斬波。采用IR2103芯片進行MOSFET管驅動,DSP輸出的PWM信號通過光耦器件后送入IR2103的輸入端,在IR2103的輸出端就可以獲得占空比相同、幅值為+15 V的MOSFET管驅動信號,調節DSP輸出PWM信號的占空比大小就可以調節有刷直流電機的轉速。
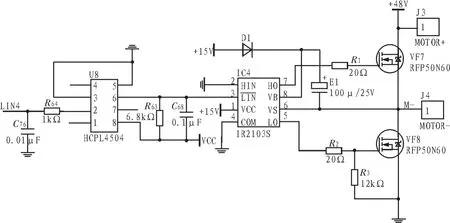
圖4 有刷電機驅動電路圖Fig.4 Driving circuit of the brush motor
2.5 磁粉制動器驅動電路
控制核心板對磁粉制動器的驅動采用圖5所示的BUCK斬波變形電路,采用75N75型MOSFET管作為DC/DC變換器的開關管,利用IR2103芯片驅動MOSFET管,DSP輸出的PWM信號通過光耦器件后送入IR2103的輸入端,在IR2103的輸出端就可以獲得占空比相同,幅值為+15V的MOSFET管驅動信號,調節DSP輸出PWM信號的占空比大小就可以調節磁粉制動器的制動力矩。
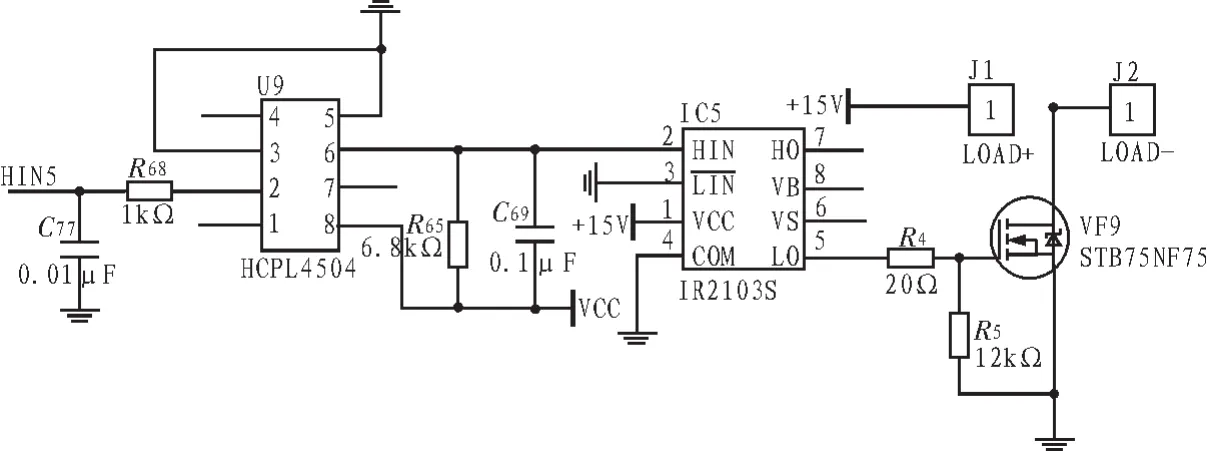
圖5 磁粉制動器驅動電路圖Fig.5 Driving circuit of magnetic powder brake
2.6 無刷直流電機逆變驅動電路
控制核心板用于無刷直流電機驅動的逆變電路為三相全橋式逆變器,采用75N75型MOSFET管作為降壓驅動DCDC變換器的開關器件。來自DSP的輸出信號通過驅動電路驅動各功率開關管的導通與關斷,使轉子各相繞組按一定次序導通,轉子相電流隨轉子位置的變化按一定的邏輯換相。必須保證在功率管完好無損的前提下能夠實現無刷直流電機的順利換向,尤其在霍爾信號有一定的干擾的情況下能無差錯的驅動。
2.7 電流采樣電路
控制核心板的電流采樣使用LEM公司生產的LT58-S7型電流傳感器,它是一種采用霍爾原理做成的閉環補償型電流傳感器,具有出色的精度、良好的線性度、低溫漂性、良好的反應時間、寬頻帶、抗干擾能力強、強電流過載能力,轉換率為1:1 000,精度在±0.8%以內。
利用電流傳感器獲得的電流信號并不能直接接入DSP進行使用,因為一方面直接得到的電流信號包含有很多的干擾信號,需要經過一套電路進行濾波才能獲得清晰可用的電流信號,另一方面為了保證DSP安全,電流信號在送到DSP以前必須經過電壓區域的映射,即將采樣電阻獲得的0~5 V電壓線性映射到0~3.3 V之間。
3 路況仿真檢測系統控制核心板軟件設計
控制核心板軟件的作用是初始化系統的各模塊、按照各種邏輯調度和安排各個任務工作,來實現系統需要的各種功能。系統各模塊的初始化包括DSP內核的初始化,數字信號輸入輸出(DIO)模塊的初始化,定時器模塊的初始化,模數轉換(ADC)模塊的初始化,以及PWM輸出模塊的初始化和液晶驅動芯片HT1621的初始化和啟動系統的各種中斷和功能。系統初始化完成后進入等待定時器周期中斷循環狀態。
系統程序設計了一個工作狀態標志state_flg和一個仿真對象標志work_state。當state_flg等于FZ_STATUS時,程序工作于仿真狀態,在仿真狀態下根據work_state的值又有3種工作模式,當work_state等于PP_STATUS時,程序工作于爬坡路況仿真狀態,當work_state等于XP_STATUS時,程序工作于下坡路況仿真狀態,當work_state等于ZH_STATUS時,程序工作于綜合路況仿真狀態。當state_flg等于SZ_STATUS時,程序工作于設置狀態,系統程序的流程圖如圖6所示。
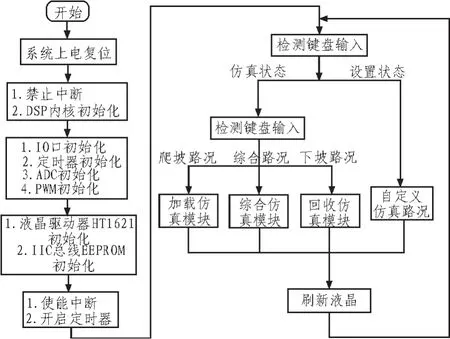
圖6 系統程序流程圖Fig.6 Flow chart the software design
4 仿真實驗
實驗對象為博源電摩托車及其HIC4816-EDD型控制器,使用該電動摩托車對實驗室附近典型路況進行路況信息采集,實驗條件為水泥路面,坡度15°,晴朗無風,小轉把快速啟動實驗。結果如圖7(a)所示,然后又在文中所設計的路況仿真檢測系統進行了仿真實驗,如圖7(b)所示。
與實際采集結果進行對比,計算仿真與實際采集結果的誤差為:
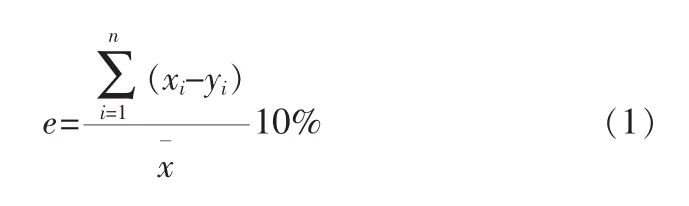
式中:
xi——圖7(a)對應路況下的實際路況信息數據點,每隔300 ms一個;
yi——圖7(b)中每隔300 ms取點所獲得的電流值;
x——圖7(a)對應路況下的實際路況信息數據點的均值。
5 結 論
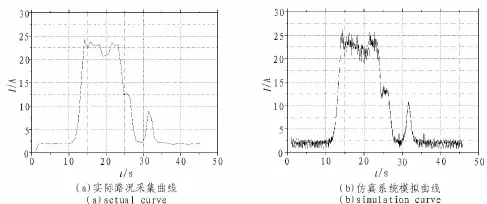
圖7 實驗曲線Fig.7 Experimental curve
文中設計了一套電動摩托車路況仿真檢測系統的方案,并搭建了實驗臺,利用磁粉制動器和有刷直流電機實現了對電動摩托車的爬坡和下坡制動的仿真檢測,由實驗結果可知,仿真檢測系統已經可以實現實驗室內對電動摩托車實際行駛過程的仿真,為了能夠達到實驗室內完全準確的對大部分實際行駛狀況的仿真,需要利用實車實驗對路況信息數據庫進行不斷的積累,在積累的數據的基礎上可以通過人為的組合處理來建立更廣的數據庫,形成一個良性循環。
[1]崔萬安.電動自行車[M].北京:機械工業出版社,2001.
[2]王曉偉,潘雙夏,陳入領.電動自行車檢測系統的方案設計[J].現代機械,2003(1):32-35.WANG Xiao-wei,PAN Shuang-xia,CHEN Ru-ling.Design of electric bicycle testing system[J].Modern Machinery,2003(1):32-35.
[3]傅超二,潘雙夏,胡驍.電動自行車整車性能計算機檢測系統的研究[J].機械設計與制造,2003(2):16-17.FU Chao-er,PAN Shuang-xia,HU Xiao.Thedesignof electric-bicycle testing system[J].Machinery Design &Manufacture,2003(2):16-17.
[4]王曉玲,王玉玲,張青.電動自行車整車性能自動檢測系統[J].現代制造工程,2006(6):25-29.WANG Xiao-ling,WANG Yu-ling,ZHANG Qing.Design of electric bicycle performance auto-testing system[J].Modern Manufacturing Engineering,2006(6):25-29.
[5]胡驍.新型電動自行車整車性能自動檢測平臺的研究與開發[D].杭州:浙江大學,2003.
[6]胡寶興,賈穎蓮,姜偉.電動自行車用無刷直流電動機控制器的設計[J].微特電機,2006(12):29-32.HU Bao-xing,JIA Ying-lian,JIANG Wei.Design of brushless DC motor controller used in the electric bicycle[J].Small&Special Electrical Machines, 2006(12):29-32.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45