基于EtherCAT的高性能伺服系統設計與實現
2013-02-22 08:22:48黃守道陳正茂
微特電機 2013年4期
黃 慶,黃守道,劉 竹,王 輝,潘 鑫,陳正茂
(1.湖南大學,湖南長沙410082;2.中國機械工業聯合會,北京100823;3.湖南省電力公司,湖南長沙410300)
0 引 言
伺服控制系統是現代機械系統中關鍵的執行部件,其性能的優劣很大程度上決定了系統的性能。新一代高性能的伺服系統大都采用永磁同步電機全數字伺服系統。永磁電機伺服系統在電子軸傳動印刷機器中的應用是目前伺服系統的頂級應用,電子軸傳動就是通過工業以太網控制多臺伺服電動機代替機械軸傳動,伺服控制器間由高速工業以太網總線連接,通過網絡控制軟件保證內部的虛擬電子軸對伺服控制系統實時同步控制。電子軸傳動在印刷行業具有明顯的優勢,也有較大的技術難度,因而是目前全球印刷企業的焦點[1]。
永磁交流伺服技術以及基于高速實時控制網絡的電子軸技術是研制先進機電一體化設備,如工業機器人、數控機床、印刷設備等的核心技術之一,目前我國電子軸高性能交流永磁伺服系統主要依靠進口,這種狀況限制了我國高科技產業的發展。用于運動控制系統的現場總線網絡有CANopen、Profibus、PCI、Modbus、SERCOS 和 EtherCAT 等,將工業以太網用于運動控制的主要是SERCOS和Ether-CAT[2]。
本文針對我國高性能裝備共性配套需求,研究具有當前國際水平的高性能、實用化和自主知識產權的電子軸傳動交流永磁伺服系統,為打破國外的交流伺服系統產品的行業壟斷打下了堅實的基礎。首先利用自主設計的印刷機械用的伺服電動機作為控制對象搭建實驗平臺,電機中安裝了高端絕對位置值編碼器,采用EtherCAT網絡作為多軸聯動的總線接口,針對實際需求,設計自主研發的控制器和驅動器,運用了自抗擾器作為控制策略。最后通過仿真和實驗的驗證,該伺服系統在控制電機的實際運行中滿足實際的要求。
1 基于EtherCAT高性能伺服系統
1.1 基于EtherCAT多軸聯動伺服系統組成
EtherCAT技術突破了所有傳統的現場總線和其他的工業以太網技術的瓶頸,實時性能達到了新的性能高度。同時,其靈活的拓撲結構以及更低的研發和使用成本,使其成為目前工業自動化新技術領域的熱點。EtherCAT是一種實時全雙工工業以太網技術[3],采用主從式結構的高速現場總線。
根據實際需求,本文設計了基于EtherCAT網絡的高實時性電子軸傳動伺服系統,其結構如圖1所示。伺服網絡控制系統由控制器和電子軸伺服驅動器建構,能以一主多從模式實時傳輸控制指令和獲取電機狀態,從而實現多臺電機之間的電子軸實時同步協調控制[4],上位機管理和組織整個控制系統有條不紊地工作,主要包括初始化、程序編譯、狀態監測和顯示等功能,主站接收上位機給定的控制值,并將數據傳給從站的運動控制器,而從站控制器主要接收主站的數據或者命令,實現伺服電動機的位置控制,并將伺服電動機的狀態傳回給主站,以便上位機接收并顯示。

圖1 基于EtherCAT電子軸傳動伺服系統結構圖
1.2 基于EtherCAT伺服系統的工作原理
圖2是基于EtherCAT網絡的多軸伺服運動控制系統框圖。主站PC利用EtherCAT網絡周期性地給微處理器DSP發送電流、速度、位置等指令,從而控制伺服驅動設備,伺服設備的工作狀態信息由檢測機構送回DSP,然后通過EtherCAT網絡告訴主站,使上位機能夠較好地了解伺服系統的運行狀態[4]。
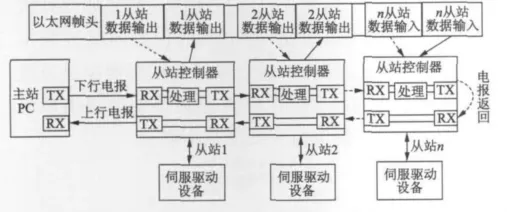
圖2 伺服網絡控制系統工作原理
1.3 基于EtherCAT伺服系統的結構及硬件設計
本文設計PC機為主站,基于ET1100從站接口控制器和微處理器DSP芯片TMS320F2812為從站的一主多從結構網絡,如圖3所示。
由圖3可知,交流永磁同步伺服系統由控制系統、變頻器和電機組成。由于交流永磁同步電機運行時轉矩平穩,故在高精度、寬調速范圍伺服驅動中,伺服系統被控對象選用交流永磁同步電動機,控制系統一般由位置環構成外環,而速度環和電流環構成內環的控制結構。
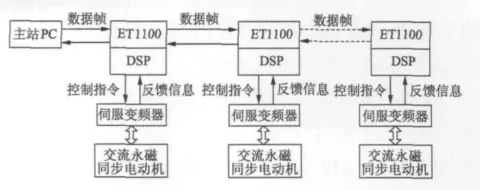
圖3 EtherCAT電子軸傳動伺服控制框圖
2 永磁同步電動機的自抗擾控制器
2.1 永磁同步電動機數學模型
三相永磁同步伺服電動機的數學模型是一個多變量、非線性、強耦合系統。本系統采用了三相正弦波電流驅動的凸極式轉子永磁同步電動機(SPMSM)為被控對象,Ld=Lq,基于id=0矢量控制策略,可得PMSM的狀態方程[5]:
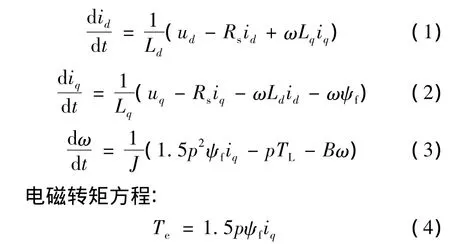
式中:ud是定子d軸電壓;uq是定子q軸電壓;id是定子d軸電流;iq是定子q軸電流;ψf是轉子磁鏈;Rf是定子繞線電阻;ω是轉子角頻率;Ld是定子d軸自感;Lq是定子q軸自感;Te是電機的電磁轉矩;J是電機的轉子轉動慣量;TL是電機負載轉矩;p是電機的極對數;B是電機的阻力系數[6-8]。
2.2 自抗擾控制器的數學模型
自抗擾控制器(以下簡稱ADRC)源于非線性PID控制技術發展而來的改進型非線性控制技術[9]。它可施加控制力來抵消各種不確定外擾作用的影響,且依據非線性狀態反饋控制率提高系統的控制性能。自抗擾控制器一般由:跟蹤微分器TD、非線性狀態反饋NLSEF、擴張狀態觀測器ESO組成[10-11]。本設計中的二階ADRC離散系統可描述:
跟蹤微分器:
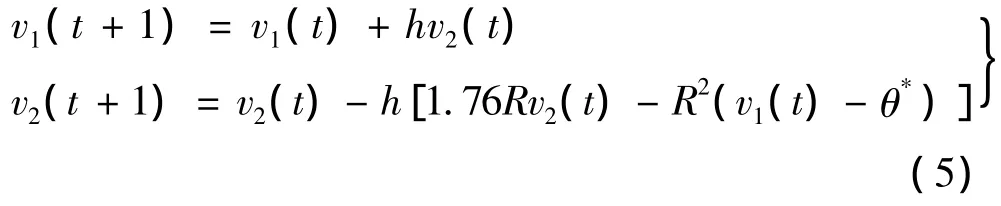
式中:θ*為給定的位置值;v1(t)為θ*位置值的跟蹤信號;v2(t)為v1(t)跟蹤信號的微分信號;h為采樣的步長即采樣時間;R為系統的速度因子,速度因子越大,跟蹤信號的速度就越快[5]。
非線性擴張狀態觀測器:
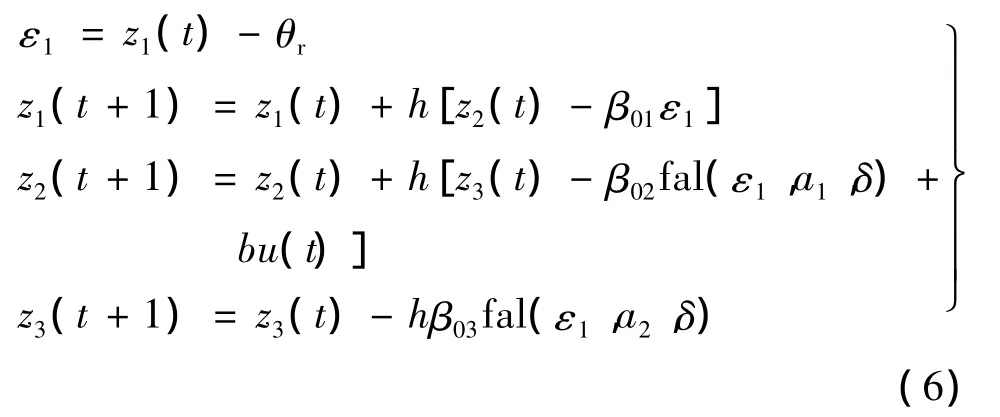
式中:θr是編碼器返回值;z1(t)是對θr位置的跟蹤值;z2(t)是對z1(t)跟蹤值的微分;z3(t)是對系統擾動的跟蹤;β01、β02和 β03是輸出誤差校正增益;ε1是誤差值;δ是系統的濾波因子;fal(·)是非線性狀態觀測器的最優綜合控制函數[12],fal(·)的函數式:
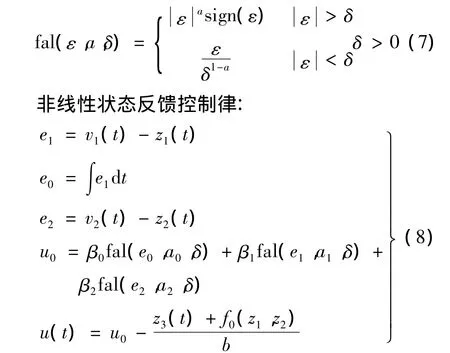
式中:a0、a1和a2為非線性因子;e0、e1和 e2分別為積分、誤差和微分信號;β0、β1和 β2分別為積分增益、誤差增益和微分增益;z3(t)+f0(z1,z2)為位置環a(t)的觀測值,且 f0(z1,z2)為系統已知部分;u(t)=Iq為電流給定值。圖4為ADRC位置伺服控制器的結構框圖。
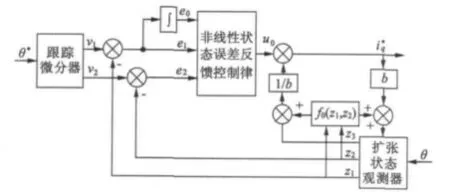
圖4 ADRC位置控制器結構圖
2.3 基于自抗擾控制器的位置環控制策略
圖5為基于二階自抗擾控制器的永磁同步電動機位置伺服系統圖。圖中PMSM位置伺服系統采用雙環結構,即位置環和電流環。外環采用了二階自抗擾控制器,結構中包含了位置環和速度環,內環電流環采用PI調節器。
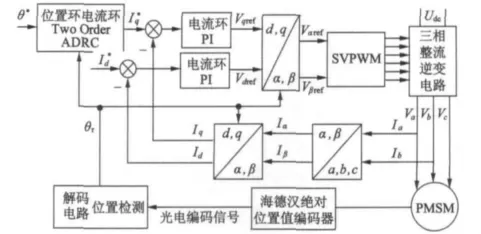
圖5 自抗擾控制的PMSM位置伺服系統結構圖
3 仿真及實驗結果分析
為驗證在EtherCAT網絡下,自抗擾控制器的永磁同步電機伺服系統的控制性能,本文利用MATLAB/Simulink對控制系統實現了數字仿真,在與實驗條件相同的條件下,以自主研發的EtherCAT變頻控制系統為核心實現了兩臺永磁同步電動機的電子軸聯動位置伺服。兩臺永磁同步電動機參數如表1所示。

表1 兩臺PMSM參數
給定位置按照0.01sin(4πt)[1-exp(-t3)]規律變化,同時負載按照27sin(4πt)[1-exp(-t3)]變化時,電機位置、轉速和系統擾動仿真曲線如圖6所示。從圖6中可以看出,對電機的位置跟蹤效果很好;在起動和穩態時,轉速的跟蹤曲線都能滿足位置伺服系統的要求;自抗擾位置控制器能估測出系統的總擾動,其估測值與實測值基本吻合。
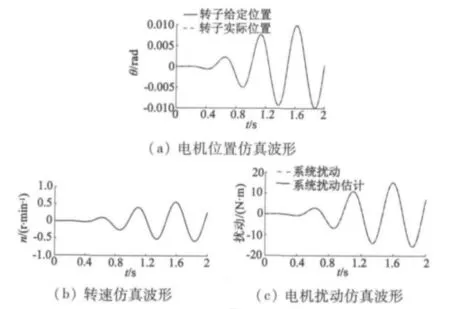
圖6 電機位置、速度和系統擾動仿真波形
多軸伺服運動控制系統,主站采用Windows xp系統的PC機,使用TwinCAT軟件,通信數據線采用100BASE-TX雙絞線運行。利用此控制系統對兩臺伺服電動機進行控制,位置給定為正弦波,并在0.4 s時,給電機突加額定負載,圖7為兩臺電機通過EtherCAT網絡的實時控制,伺服控制器采用自抗擾控制策略下,兩臺電機的位置以及速度實驗波形。由圖7可知,此控制系統位置響應速度快,控制精度高,抗擾動性能強,具有良好的控制性能,且Ether-CAT網絡能夠根據實時情況對位置進行補償,位置的同步性能較好。
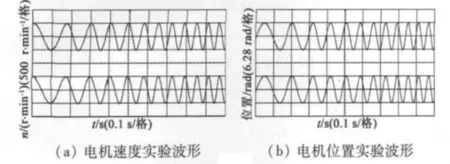
圖7 轉子位置與速度實驗波形
4 結 語
本文根據商業滾筒印刷機械實際需要,將自抗擾器應用于EtherCAT高性能電子軸傳動PMSM位置伺服,采用了二階自抗擾控制器,提高了位置伺服系統的抗擾能力和位置控制精度,并利用非線性狀態觀測器對擾動的估計,實現了裝有海德漢絕對位置值編碼器伺服電機的網絡化實時控制。通過仿真與實驗的驗證,基于自抗擾控制器的PMSM位置伺服系統具有良好控制性能,此系統基于EtherCAT網絡,由于采用的是位置控制的方式進行,主機能夠根據參考從站的實時情況對其它從站進行補償,所以位置的同步性能很好,不但實現了高性能的電子軸傳動,同時伺服電機對負載擾動具有較強的魯棒性。
[1] 阮倩茹,王輝,施大發,等.基于EtherCAT的高性能交流伺服控制系統設計[J].科技導報,2010,28(1):58-61.
[2] 姜淑忠.交流伺服運動系統的開發[J].中小型電機,2005,32(1):49-52.
[3] 單春榮,劉艷強,郇極.工業以太網現場總線EtherCAT及驅動程序設計[J].制造業自動化,2007,29(11):79-82.
[4] 施大發,王輝,梁驍,等.基于EtherCAT的風力發電機組主控系統設計[J].吉首大學學報,2010,31(5):67-71.
[5] 黃慶,黃守道,匡江傳,等.基于模糊自抗擾的PMSM無速度傳感器控制[J].湖南大學學報,2012,39(7):37-43.
[6] Oliveira J B,Araujo A D.An indirect variable structure model reference adaptive control applied to the speed control of a threephase induction motor[C]//2004 American Control Conference.AACC,2004:1946-1951.
[7] 孫凱,許鎮琳,蓋廓,等.基于自抗擾控制器的永磁同步電機位置伺服系統[J].中國電機工程學報,2007,27(15):43-46.
[8] Huang Shoudao,Kuang Jiangchuan,Huang Qing,et al.IPMSM sensorless control based on fuzzy active-disturbance rejection controller for electric vehicle[C]//Power Engineering,Energy and Electrical Drives International Conference.2011:1-6.
[9] 韓京清.從PID技術到“自抗擾控制”技術[J].控制工程,2002,9(3):13-18.
[10] 韓京清.自抗擾控制技術[J].前沿科學,2007,1(1):24-31.
[11] Zhao Chunzhe,Huang Yi.ADRC based input disturbance rejection for minimum-phase plants with unknown orders and/or uncertain relative degrees[J].Journal of Systems Science & Complexity,2002,25(4):625-640.
[12] 劉志剛,李世華.基于永磁同步電機模型辨識與補償的自抗擾控制器[J].中國電機工程學報,2008,28(24):118-123.