無軸承同步磁阻電動機解耦控制研究現(xiàn)狀
2013-06-19 09:09:20馮冬梅刁小燕朱熀秋
微特電機 2013年4期
關鍵詞:系統(tǒng)
馮冬梅,刁小燕,朱熀秋
(江蘇大學,江蘇鎮(zhèn)江212013)
0 引 言
無軸承電動機沒有像傳統(tǒng)電機里面軸承與轉子之間的摩擦力,高速運行也不需要添加潤滑油就能實現(xiàn),并且具有低噪聲和低振動等特點。無軸承電動機把轉矩繞組和可以控制轉子位置的徑向懸浮力繞組放置在同一定子上,使軸承和電機形成一體化結構,轉子收到磁場力的支持。無軸承同步磁阻電動機既具有同步磁阻電動機結構簡單、重量輕、體積小等顯著特點,又具備了磁軸承機械磨損小、無需潤滑、無油污染、高速高精等優(yōu)點,它的優(yōu)越性能遠非傳統(tǒng)電動機所能比擬。相比磁軸承支承的電動機,無軸承同步磁阻電動機因為把懸浮力繞組與轉矩繞組一起疊繞在定子中,電機結構更加簡單小巧,克服了磁軸承支承電動機軸向長度長這一缺點,而且由于不存在與軸承之間的摩擦,無軸承同步磁阻電動機能夠實現(xiàn)的臨界轉速往往比磁軸承電機更高。即使把無軸承同步磁阻電動機與其他種類無軸承電動機相比較,它也具有制造方便、電機體積小、重量輕、控制規(guī)律清晰等眾多優(yōu)點。另外,由于電機轉子上既沒有永磁體也沒有勵磁繞組,能獲得較快的動態(tài)響應,更加適合應用于高速場所。
日本東京科技大學的A.Chiba等學者在1990年首次將無軸承技術應用于同步磁阻電動機,設計出空載實驗轉速達12 000 r/min,輸出功率能夠達到2.12 kW的樣機[1]。緊接著,德國開姆尼斯技術大學的L.Hertel等學者也在前人研究的基礎上進一步研究無軸承同步磁阻電動機,其樣機輸出功率為1.5 kW,在無負載情況下樣機的實驗轉速更是能夠高達30 000 r/min[2]。國內(nèi)無軸承電動機的研究起步比國外晚,作為無軸承交流電機的分支之一,無軸承同步磁阻電動機也逐漸被發(fā)展,主要是一些理論上的研究和通過仿真軟件分析系統(tǒng)動靜態(tài)性能。但是,無軸承同步磁阻電動機目前局限于理論層次的分析和在實驗室研發(fā)樣機,還沒有真正投入生產(chǎn)應用。在基金支持和團隊協(xié)作幫助下,江蘇大學對無軸承同步磁阻電動機做了相關基礎研究,研究內(nèi)容主要包括樣機優(yōu)化設計、數(shù)學模型、多變量非線性解耦控制等。本文將簡單介紹無軸承同步磁阻電動機的工作原理和數(shù)學模型,并總結國內(nèi)外在對這個非線性強耦合系統(tǒng)解耦控制方面的研究進展。
1 無軸承同步磁阻電動機工作原理
圖1為在空載情況下無軸承同步磁阻電動機轉子上產(chǎn)生徑向懸浮力的示意圖,可以很好地說明懸浮力產(chǎn)生機理。對電機4極勵磁繞組Na通以電流產(chǎn)生的磁通記為ψa,對附加2極懸浮力繞組Ny通以電流產(chǎn)生的磁通記為ψy。對懸浮力繞組通以圖示電流,它產(chǎn)生的磁場使原來已經(jīng)達到平衡的磁場受到破壞,即3區(qū)氣隙磁通減小,1區(qū)氣隙磁通增大。由于1區(qū)磁場得到了增強,轉子產(chǎn)生了3區(qū)指向1區(qū)方向的麥克斯韋力,即圖示方向上的懸浮力Fy。與此相似,如果把相反方向的電流通入懸浮力繞組,那么電機轉子上會產(chǎn)生沿y軸負方向的懸浮力。另外,如果對無軸承同步磁阻電動機中2極懸浮力繞組Nx通以電流,調(diào)節(jié)Nx中電流的大小和方向,同樣可以產(chǎn)生x軸方向上可控的懸浮力。
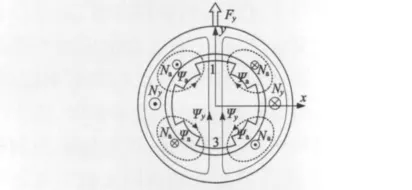
圖1 懸浮力產(chǎn)生原理
2 無軸承同步磁阻電動機數(shù)學模型
2.1 徑向懸浮力模型
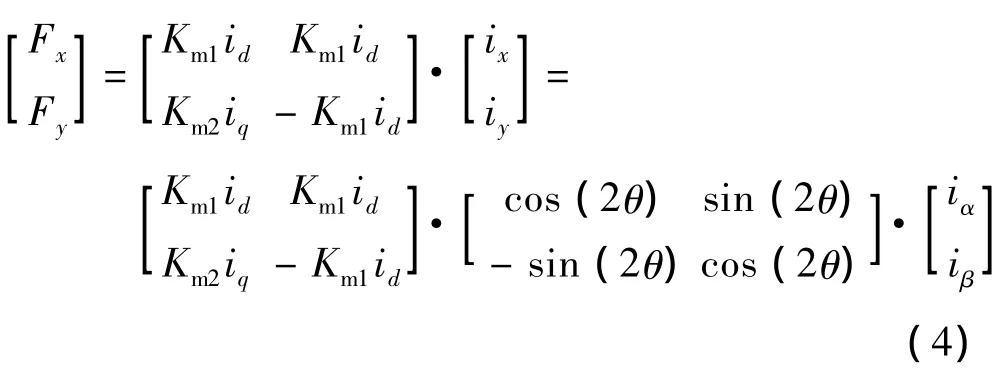
無軸承同步磁阻電動機的轉子到定子間的氣隙長度不相等,導致了氣隙磁通密度不均勻,其中磁通密度B與轉子機械角θ有關。忽略磁飽和影響,并且假設定子中的三相繞組在空間完全對稱分布疊繞,則作用在凸級轉子上麥克斯韋力x、y軸方向分量分別為:
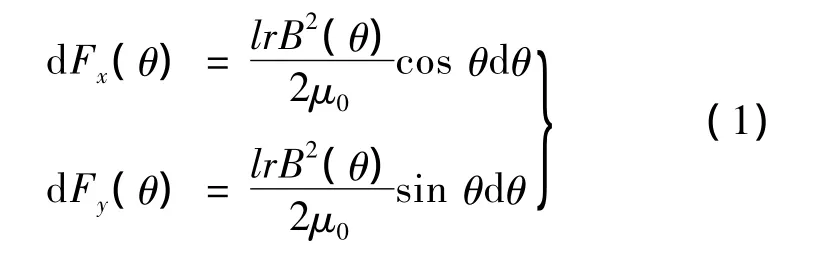
式中:μ0為磁場常數(shù),又稱真空磁導率;θ為轉子機械角;l為電機轉子有效長度;r為凸極處轉子半徑。
設對電機兩套繞組(即轉矩繞組和懸浮力繞組)通入電流后產(chǎn)生幅值分別為F1和F2的基波氣隙磁動勢,空間矢量初始相位角分別為μ和λ。對它們進行矢量相加,可得基波合成氣隙磁動勢為f(θ),則有:

式中:ω為電角頻率。
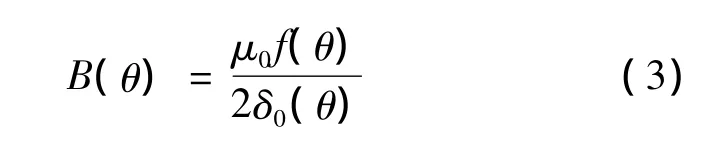
無軸承同步磁阻電動機轉子氣隙磁通密度與轉子凸極處到定子的氣隙長度和兩套繞組產(chǎn)生的基波合成氣隙磁動勢有關,其關系式為:
假定轉子與定子的偏心位移遠遠小于電機凸極處的氣隙長度,且在計算懸浮力過程中不考慮轉子由凸極結構引起的氣隙長度的變化,僅以轉子凸極處到定子間的氣隙計算,此時 δ0(θ)= δ0,將式(2)、式(3)代入式(1)中積分,可以得出轉子所受徑向懸浮:

如果定、轉子中心點不重合,就會引起轉子到定子的氣隙長度不等,氣隙不平衡,轉子上就會產(chǎn)生麥克斯韋力。其具體表達式:

式中:k為衰減比例系數(shù),大小取決電機本體結構的設計,是一個常數(shù);x、y分別為電機轉子中心偏離定子中心的位移在水平垂直方向上的分量。
理想狀態(tài)下,如果在水平、垂直方向上對電機轉子(設定自身質量為m)的施加大小分別為Fzx、Fzy的負荷力,對電機轉子進行受力分析,可以得到轉子的運動方程:

2.2 轉矩數(shù)學模型
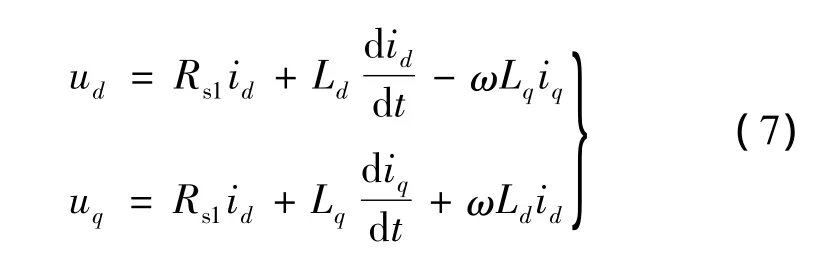
無軸承同步磁阻電動機轉子本身沒有永磁體,并且直軸方向的氣隙磁阻與交軸方向的磁阻并不相等,即ψf=0且Ld≠Lq。轉子磁阻轉矩產(chǎn)生是由于磁力線會挑一條磁阻最小的路徑走,也就是磁阻最小原理。轉換到d-q同步旋轉坐標系下轉矩子系統(tǒng)的數(shù)學模型如下:
定子磁鏈方程:

電磁轉矩:

旋轉運動方程:

式中:ud、uq為定子電壓分量,并且分別是在d、q軸方向上的電壓分量;ψd、ψq為定子磁鏈分量,分別為旋轉坐標系下的d、q軸分量;ω為電機定子產(chǎn)生的旋轉磁場的角速度;Rs1為定子中的轉矩繞組每相電阻阻值;p為電機轉矩繞組產(chǎn)生磁場的極對數(shù);J為電機轉子轉動慣量;Te為電磁轉矩,在電機中起拖動作用;TL為負載轉矩,在電機中起制動作用。
3 無軸承同步磁阻電動機解耦控制策略
無軸承同步磁阻電動機是一個耦合性非常強,并且具有多輸入多輸出變量的復雜的非線性系統(tǒng),轉矩繞組和懸浮力繞組各自產(chǎn)生的磁場在氣隙中相互疊加在一起導致電磁轉矩與懸浮力兩者之間相互影響。另外,在垂直和水平方向上,懸浮力自身耦合現(xiàn)象也非常嚴重,因此,只有完全消除電磁轉矩與懸浮力之間還有徑向懸浮力自身在x、y方向上的耦合才能使電機懸浮運行在一個穩(wěn)定狀態(tài)。綜述現(xiàn)有研究成果和文獻,其解耦控制策略有以下四種。
3.1 前饋法解耦控制策略
文獻[3-7]通過串接前饋補償器并且給定定子電流的方法,解除了無軸承同步磁阻電動機懸浮力和電磁轉矩之間的動態(tài)耦合關系。前饋補償器解耦控制結構圖如圖2所示,根據(jù)懸浮力數(shù)學模型推導出公式來證明解耦補償器可以實現(xiàn)解耦控制。圖中,解耦補償器以轉子在x、y軸所受懸浮力的參考值以及轉矩繞組d-q軸電流分量id、iq為輸入,可以輸出大小與相等的徑向懸浮力。因此,前饋補償器可以避免徑向懸浮力因為電磁轉矩波動而產(chǎn)生變化。但是,由于電機中存在的懸浮力和電磁轉矩之間的交叉耦合畢竟是由實際定子電流時變性造成的,所以只有當給定的id恒等于實際的轉矩繞組電流d軸分量時,被控對象才能成功解耦。但是由于電機本身負載為感性,存在滯后環(huán)節(jié),所以電機剛開始起動或者負載發(fā)生大小變化等過程中,給定定子電流并不恒定等于實際的定子電流,可能造成解耦不成功。另外,受磁飽和因素的影響,解耦補償器中的參數(shù)容易發(fā)生變化,因此并不能實現(xiàn)電磁轉矩和徑向懸浮力之間完全意義上的動態(tài)解耦。
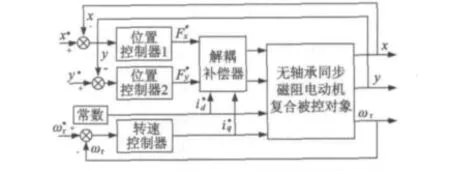
圖2 前饋補償器解耦控制結構圖
3.2 反饋解耦控制策略
在前饋補償解耦的基礎上用轉矩繞組d軸電流反饋量取代給定定子電流參與解耦運算,就是反饋解耦控制方法。文獻[8-10]通過添加反饋補償?shù)姆椒▉韺崿F(xiàn)對無軸承同步磁阻電動機的解耦控制。反饋解耦控制器的結構與前饋補償器相似,圖3為反饋解耦控制結構圖。不同的是,反饋解耦控制器中輸入量之一采用的是無軸承同步磁阻電動機復合被控對象輸出再經(jīng)過坐標變換的電流反饋值,而前饋補償解耦控制方法中用給定的勵磁電流分量id直接參與運算,這會引起系統(tǒng)準確性和動態(tài)性能不佳。反饋解耦控制方法采用反饋回來的勵磁電流分量正好克服了前饋法解耦控制準確性和動態(tài)性能上的弊端,從而能夠成功解耦。但同樣因為電機本身存在滯后環(huán)節(jié),檢測到的電流大小并不一直等同于實際定子電流,所以在轉速大幅度調(diào)節(jié)或負載突然發(fā)生變化等快速響應過程中解耦還是有可能失敗。
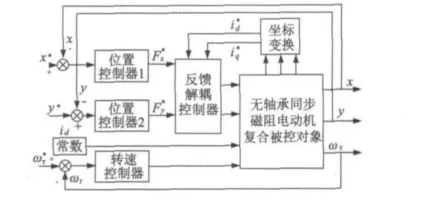
圖3 反饋解耦控制結構圖
3.3 逆系統(tǒng)解耦控制策略
文獻[11-16]將α階逆系統(tǒng)理論應用于強耦合、多變量的非線性無軸承同步磁阻電動機系統(tǒng),從而把無軸承同步磁阻電動機系統(tǒng)線性化解耦成為三個線性積分子系統(tǒng),并且三個子系統(tǒng)之間相互獨立。圖4是α階逆系統(tǒng)解耦圖,圖中把位置和轉速控制器串聯(lián)在α階逆系統(tǒng)之前,組成了逆系統(tǒng)復合控制器,以給定值與反饋值的差值為輸入信號,輸出轉矩電流分量參考值,懸浮力繞組x-y軸電流分量參考值與給定勵磁電流分量值id一起作為無軸承同步磁阻電動機復合被控對象的輸入值。逆系統(tǒng)方法能夠有效提高系統(tǒng)的控制性能,而且能完全意義上解除無軸承同步磁阻電動機變量之間的耦合。但是逆系統(tǒng)方法需要能夠精確描述被控系統(tǒng)的非線性輸入輸出特性,建立準確的數(shù)學模型,顯然這些在實際工程問題中難以實現(xiàn)。而且由于實際工業(yè)模型比較復雜,即使能夠建立被控非線性系統(tǒng)的精確數(shù)學模型,如何準確解出逆系統(tǒng)又是個難題。這些問題阻礙了逆系統(tǒng)方法的進一步發(fā)展,極大地限制了它的使用。
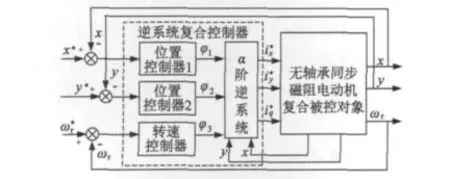
圖4 α階逆系統(tǒng)解耦圖
3.4 支持向量機逆系統(tǒng)解耦控制策略
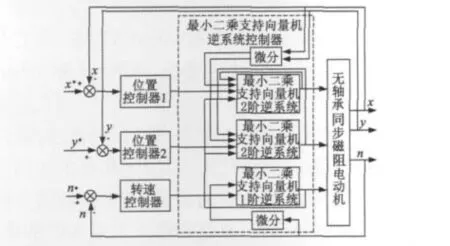
圖5 基于最小二乘支持向量機逆系統(tǒng)的復合控制
對于無軸承同步磁阻電動機這個具有多輸入輸出變量,而且又有強耦合性質的非線性系統(tǒng),目前使用的矢量解耦控制方法中存在眾多問題,比如計算過程復雜、參數(shù)變化常常能夠引起控制性能不佳等。而逆系統(tǒng)解耦控制方法也存在建立數(shù)學模型困難、求逆模型解析解運算量大等缺陷。為實現(xiàn)其電磁轉矩和懸浮力之間的解耦控制,文獻[17-20]提出了最小二乘支持向量機逆系統(tǒng)解耦控制方法,這是一種比較新穎的解耦控制策略,圖5是支持向量機逆系統(tǒng)控制結構圖。把逆系統(tǒng)方法與支持向量機思想有機結合起來就能實現(xiàn)支持向量機逆系統(tǒng)解耦控制。與逆系統(tǒng)等方法相比,最小二乘支持向量機不需要建立精確的數(shù)學模型,克服了前面三種方法精確數(shù)學模型難以建立而引起的系統(tǒng)準確性不高的缺點,這種優(yōu)越性決定了支持向量機逆系統(tǒng)解耦控制策略能夠廣泛應用于非線性解耦控制。這種控制策略首先推導在非線性連續(xù)系統(tǒng)下最小二乘支持向量機逆模型算法,并將該算法應用到無軸承同步磁阻電動機這個耦合性極強的多輸入輸出變量連續(xù)系統(tǒng)中,通過系統(tǒng)微分方程的輸入輸出特性分析,將原先復雜的強耦合連續(xù)系統(tǒng)解耦成三個具有線性傳遞函數(shù)關系并且互不影響的偽線性單輸入單輸出(SISO)子系統(tǒng)。由于偽線性系統(tǒng)并不是真正意義上的線性系統(tǒng),所以必須在此基礎上設計閉環(huán)控制器,最后通過仿真試驗驗證得出這種控制方案能正確可靠解耦。
4 結 語
無軸承同步磁阻電動機勵磁調(diào)節(jié)簡單,容易實現(xiàn)高速運轉,而且其控制規(guī)律清晰、性能優(yōu)良,所以能夠在高速電力傳動場所中脫穎而出,同時在特殊環(huán)境比如航空航天、食品生產(chǎn)等場所也有著很大的使用價值。但是目前在無軸承同步磁阻電動機發(fā)展的道路上還有很多亟待解決的實際應用問題,導致了它并沒能真正運用于工業(yè)生產(chǎn)。優(yōu)化設計控制系統(tǒng)是無軸承同步磁阻電動機研究的重中之重,由于電機本身參數(shù)容易因為各種原因發(fā)生變化,很多解耦控制方法的準確性有待提高,如果能采用滑模變結構控制、自適應控制等新穎的控制算法和解耦控制策略,來實時跟蹤時變參數(shù)從而減少解耦效果對于電機參數(shù)的依賴性,整個控制系統(tǒng)的穩(wěn)定性和準確性必然能得到進一步提高。另外,將逆系統(tǒng)方法或者其它反饋線性化方法與智能控制方法相結合并取長補短,是解耦控制今后的重要研究方向之一。因此,對于無軸承同步磁阻電動機解耦控制方法的研究是一個十分迫切且兼具現(xiàn)實和長遠意義的重要課題。
[1]Chiba A,Chida K,F(xiàn)ukao T.Principles and characteristics of a reluctance motor with windings of magnetic bearing[C]//Proc.of 1990 IPEC,Tokyo.1990:919 -926.
[2]Hertel L,Hofmann W.Theory and test results of a high speed bearingless reluctance motor[C]//Proc.of 1999 PCIM,Nuremberg.1999:143-147.
[3]Chiba A,Azizur Rahman M,F(xiàn)ukao T.Radial force in a bearingless reluctance motor[J].IEEE Trans.on Magnetics,1991,27(2):786-790.
[4]Michioka C,Sakamoto T,Ichikawa O.A decoupling control method of reluctance-type bearingless motors considering magnetic saturation[J].IEEE Trans.on Industry Applications,1996,32(5):1204-1210.
[5]Hertel L,Hofmann W.Magnetic couplings in a bearingless reluctance machine[C]//Proc.of 2000 ICEM,Helsinki.2000:1776 -1780.
[6]Zhang Hannian,Zhu Huangqiu,Zhang Zhibao,et al.Design and simulation of control system for bearingless synchronous reluctance motor[C]//Proc.of 2005 ICEM,Nanjing.2005:554 -558.
[7]張漢年,朱熀秋,張植保.基于前饋補償器的無軸承同步磁阻電機解耦控制[J].東南大學學報,2005,35(增刊Ⅱ):193-197.
[8]Zhang Hannian,Zhu Huangqiu,Diao Xiaoyan.Feedback decoupling control of bearingless synchronous reluctance motor[C]//26th Chinese Control Conference.2007:763 -767.
[9]Lv Yanbo,Diao Xiaoyan,Zhu Huangqiu.State feedback decoupling control of AC 5 degrees of freedom hybrid magnetic bearings[C]//Proc.of 2011 ICEMS.2011:1 -5.
[10]張漢年,朱熀秋,刁曉燕.無軸承同步磁阻電動機反饋解耦控制[C]//第26屆中國控制會議論文集.2007(4):763-767.
[11]王喜蓮,葛寶明.磁浮開關磁阻電機徑向懸浮逆系統(tǒng)方法控制[J].電機與控制學報,2009,13(3):356 -360.
[12]張興華,戴先中,基于逆系統(tǒng)方法的感應電機調(diào)速控制系統(tǒng)[J].控制與決策,2000,15(6):708 -711.
[13]Ronald M Hirschorn.Invertibilty of multivariable nonlinear control systems[J].IEEE Trans.on AC,1979,24(6):855 -865.
[14]Sahjendra N Singh.Decoupling of invertible nonlinear systems with state feedback and precompensation[J].IEEE Trans.on AC,1979,24(6):1237 -1239.
[15]張婷婷,朱熀秋.無軸承同步磁阻電機逆系統(tǒng)的解耦控制[J].控制理論與應用,2011,28(4):545 -550.
[16]孫曉東,朱熀秋.基于神經(jīng)網(wǎng)絡逆系統(tǒng)理論無軸承異步電動機解耦控制[J].電工技術學報,2010,25(1):43 -49.
[17]Alex J Smola.A tutorial on support vector regression[J].Statistics and Computing,2004,14(3):199 -222.
[18]曹克強,胡良謀,李小剛,等.非線性系統(tǒng)的支持向量機逆模型辨識及控制[J].機械科學與技術,2011,30(5):708 -711.
[19]周云紅,孫玉坤,黃永紅.磁懸浮開關磁阻電機的支持向量機逆全解耦控制[J].江蘇大學學報,2012,33(1):60 -64.
[20]Vapnik V N.An overview of statistical learning theory[J].IEEE Trans.on Neural Networks,1999,10(5):955-999.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32