三種湍流模型對(duì)導(dǎo)管螺旋槳空化性能計(jì)算的比較
2013-02-07 02:53:34周其斗潘雨村
中國(guó)艦船研究 2013年2期
關(guān)鍵詞:模型
李 超,周其斗,潘雨村,陶 山
海軍工程大學(xué)艦船工程系,湖北武漢430033
0 引 言
空化是在水力機(jī)械中和高速水下航行體表面經(jīng)常發(fā)生的現(xiàn)象。空化的發(fā)生常常導(dǎo)致水力機(jī)械過(guò)流部件表面嚴(yán)重破壞,并產(chǎn)生強(qiáng)烈的空化噪聲。與此同時(shí),對(duì)于螺旋槳,還常伴隨著推進(jìn)效率的下降。由于空化測(cè)試成本較高,如何準(zhǔn)確地對(duì)空化流動(dòng)進(jìn)行數(shù)值模擬一直是計(jì)算流體動(dòng)力學(xué)(CFD)領(lǐng)域關(guān)心的問(wèn)題。目前,對(duì)于螺旋槳不考慮空化條件下的性能計(jì)算已經(jīng)比較成熟[1-2]。在近年的研究中,常采用在兩相流模型[3]的基礎(chǔ)上增加空化模型來(lái)進(jìn)行空化模擬。在各種空化模型[4-5]中,Rayleigh-Plesset 空化模型應(yīng)用較廣泛,并獲得了較好的計(jì)算結(jié)果[6]。湍流模型常選擇標(biāo)準(zhǔn)k-ε 模型[7],錢忠東等[8]對(duì)不同湍流模型對(duì)水翼性能數(shù)值計(jì)算的影響進(jìn)行了對(duì)比分析,但對(duì)不同湍流模型對(duì)螺旋槳空化性能模擬計(jì)算精度的影響缺少必要的研究。
本文將以某單位設(shè)計(jì)的BD12+D4-70 型導(dǎo)管螺旋槳為例,借助通用計(jì)算流體力學(xué)軟件,采用Rayleigh-Plesset 空化模型和3 種不同的湍流模型,對(duì)該槳在3 個(gè)不同空化數(shù)條件下進(jìn)行了數(shù)值模擬,得到在不同湍流模型、不同空化數(shù)條件下導(dǎo)管螺旋槳的空泡性能,并與已有試驗(yàn)數(shù)據(jù)進(jìn)行比對(duì)。同時(shí),還將分析不同湍流模型、不同空化數(shù)對(duì)槳葉、導(dǎo)管相關(guān)空泡性能計(jì)算的影響,定性的比較3 種湍流模型對(duì)空化數(shù)的敏感程度。
1 數(shù)學(xué)模型
采用Rayleigh-Plesset 空化模型,在該空化模型的控制方程方面,連續(xù)方程為

動(dòng)量方程為
空化過(guò)程描述方程為

式中:μt為渦粘系數(shù);SM為流體質(zhì)點(diǎn)所受的質(zhì)量力;RB為氣泡半徑;pv為汽化壓力;p 為環(huán)境壓強(qiáng);ρf為液體的密度;σ 為氣泡與液體之間的表面張力系數(shù)。
在確定渦粘系數(shù)μt時(shí),將其與湍流時(shí)均參數(shù)聯(lián)系起來(lái),即形成湍流模型。本文為了比較不同湍流模型對(duì)空化模擬結(jié)果的影響,分別采用了標(biāo)準(zhǔn)k-ε 模型、RNG k-ε 模型和k-ω 模型。
1.1 標(biāo)準(zhǔn)k-ε 模型
在標(biāo)準(zhǔn)k-ε 模型中,湍動(dòng)能和耗散率的控制方程為
式中:Sk和Sε為用戶自定義的源項(xiàng);μt為湍流粘性系數(shù);模型常數(shù)為cμ=0.09,c1=1.44,c2=1.92,σk=1.0,σε=1.3。
1.2 RNG k-ε 模型
RNG k-ε 模型是基于重整化群(Renormaliza?tion Group)的理論提出,經(jīng)改進(jìn),其控制方程與標(biāo)準(zhǔn)k-ε 模型形式相同,但模型常數(shù)略有差異:cμ=0.085,c2ε=1.68,σk=σε=0.717 9 。主 要 區(qū)別在于,c1不再是常數(shù),而是表示為η(湍流時(shí)間尺度與平均應(yīng)變率之比)的函數(shù):
式中,η0=4.38;β=0.015。 RNG k-ε 模型增加了平均應(yīng)變率的影響。
1.3 k-ω 模型
式中:β′=0.09;α=5/9;β=0.075;σk=2;σω=2。
2 計(jì)算模型
本文的具體研究對(duì)象是由某單位設(shè)計(jì)的BD型導(dǎo)管+D 系列螺旋槳。導(dǎo)管的剖面形狀和螺旋槳葉片展開(kāi)輪廓圖如圖1 所示。槳葉直徑為0.24 m,螺距比為1.4,盤(pán)面比為0.7,共有4 片槳葉,導(dǎo)管內(nèi)壁與槳葉葉梢間隙為1.5 mm。
在此基礎(chǔ)上,利用Gambit 對(duì)該導(dǎo)管螺旋槳進(jìn)行了三維建模,如圖2 所示。本文的數(shù)值模擬采用多重參考系MFR 方法,將流域分為靜域和動(dòng)域。螺旋槳所在區(qū)域(區(qū)域1)為動(dòng)域,其余為靜域(區(qū)域2~區(qū)域5)。
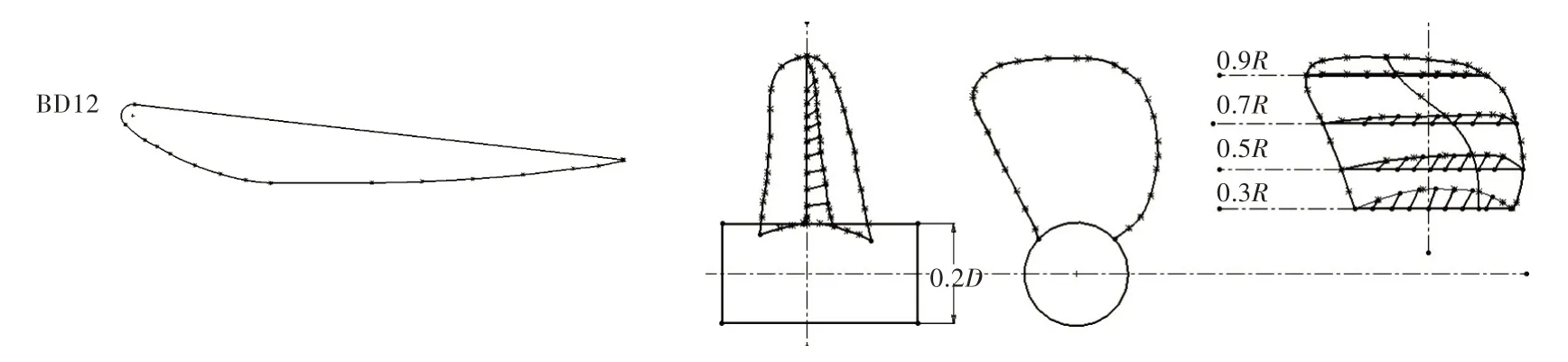
圖1 導(dǎo)管剖面圖和螺旋槳葉片展開(kāi)輪廓Fig.1 Section plane of duct and propeller blade
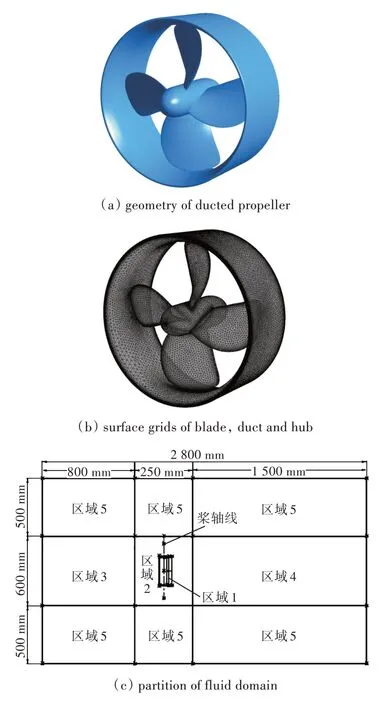
圖2 計(jì)算采用的導(dǎo)管螺旋槳的幾何外形、表面網(wǎng)格和流域劃分Fig.2 Geometry of ducted propeller,surface grids and partitions of fluid domain
導(dǎo)管螺旋槳所在的流域?yàn)橐粋€(gè)長(zhǎng)2.8 m,直徑1.6 m 的圓柱形區(qū)域,流域被分為5 個(gè)部分進(jìn)行網(wǎng)格劃分。由于導(dǎo)管螺旋槳的幾何模型較復(fù)雜,因此,在區(qū)域1 和區(qū)域2 采用適應(yīng)性強(qiáng)的非結(jié)構(gòu)化網(wǎng)格進(jìn)行劃分,而在區(qū)域3~區(qū)域5 則選用六面體單元?jiǎng)澐志W(wǎng)格。此計(jì)算模型共有512 444 個(gè)節(jié)點(diǎn),2 447 659 個(gè)體單元(其中無(wú)高度傾斜的體單元)。
進(jìn)行數(shù)值計(jì)算時(shí),均使用相同的邊界條件:進(jìn)口為均勻來(lái)流,入流速度為3 m/s;出口選取CFX中outlet 的static pressure 條件;葉片、導(dǎo)管和槳轂采用無(wú)滑移絕熱壁面條件;遠(yuǎn)場(chǎng)區(qū)域速度與來(lái)流相同;動(dòng)、靜域之間采用CFX 中以GGI 方式連接的Frozen Rotor 參考坐標(biāo)系轉(zhuǎn)換方法。在進(jìn)行空化性能計(jì)算時(shí),汽化壓力選為25℃時(shí)水的汽化壓力,為3 574 Pa。
3 數(shù)值計(jì)算結(jié)果
由試驗(yàn)圖譜可知,在空化數(shù)為σ =2.4,3.3,4.5這3 種情況下,在進(jìn)速系數(shù)J = 0.6~0.9 時(shí),空化性能與無(wú)空化的敞水性能相差較大。因此,在進(jìn)行計(jì)算時(shí),進(jìn)速系數(shù)的選取范圍為0.6~0.9。可通過(guò)保持入流速度不變,調(diào)整螺旋槳轉(zhuǎn)速來(lái)改變進(jìn)速系數(shù)。
3.1 不考慮空化的敞水性能計(jì)算結(jié)果
由于空泡計(jì)算對(duì)計(jì)算的初始值要求較高,因此本文在進(jìn)行數(shù)值模擬時(shí)先不考慮空泡,先采用3 種不同的湍流模型對(duì)導(dǎo)管螺旋槳的敞水性能進(jìn)行計(jì)算,待其收斂后再以此時(shí)的值為初始值,分別用不同的湍流模型進(jìn)行空泡性能計(jì)算。根據(jù)在不考慮空泡情況下的計(jì)算結(jié)果,得出在J = 0.6,0.7,0.8,0.9 處的敞水性能KT,KQ,η 與試驗(yàn)所得的敞水性能曲線對(duì)比如圖3 所示。
3 種不同湍流模型計(jì)算的相對(duì)誤差如表1 所示。由表中可看出,推力系數(shù)KT、扭矩系數(shù)KQ及推進(jìn)效率η 的計(jì)算結(jié)果誤差均約為5%,滿足工程預(yù)報(bào)的要求,同時(shí),也證明了采用數(shù)值模擬計(jì)算導(dǎo)管螺旋槳敞水性能的可靠性。
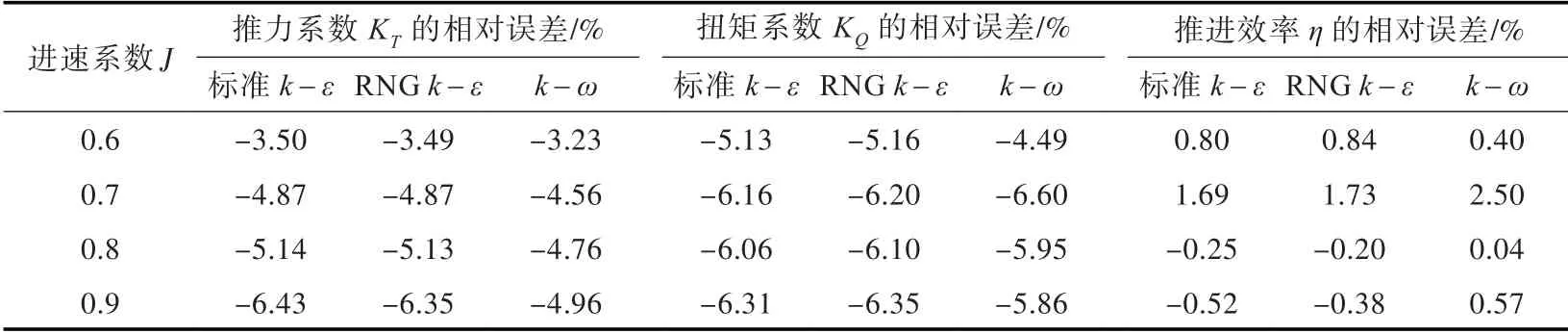
表1 3 種不同湍流模型計(jì)算的相對(duì)誤差Tab.1 Calculation errors of different turbulence models
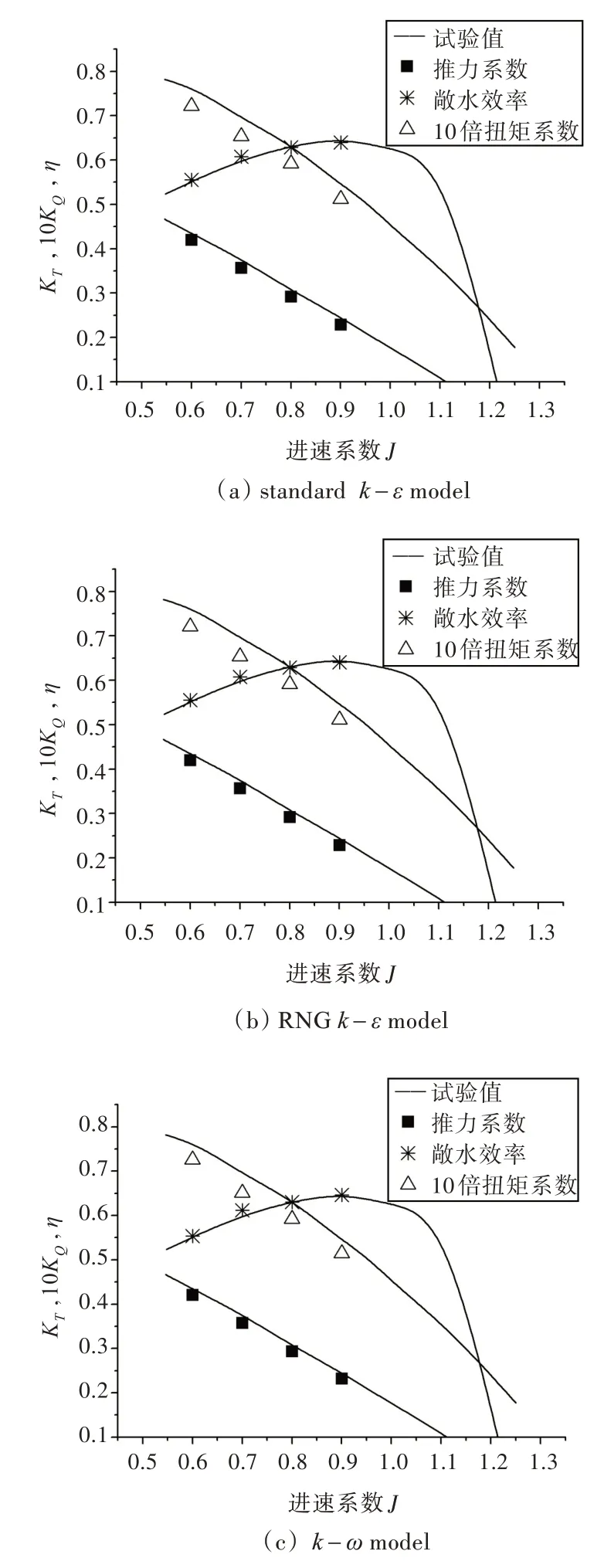
圖3 不同湍流模型的敞水性能計(jì)算結(jié)果Fig.3 Open water performance calculated by different turbulence models
3.2 不同空化數(shù)下的空泡性能計(jì)算結(jié)果
空化數(shù)σ 是空化流動(dòng)的一個(gè)重要參數(shù),直接影響著空泡的大小及空化發(fā)生的位置,進(jìn)而影響到空化性能。本文對(duì)空化數(shù)σ = 2.4,3.3,4.5 這3種不同的情況進(jìn)行了空泡性能計(jì)算。在定義出口為static pressure 條件時(shí),輸入的相對(duì)壓力即為遠(yuǎn)場(chǎng)的環(huán)境壓力,空化數(shù)的調(diào)整是通過(guò)改變此環(huán)境壓力來(lái)實(shí)現(xiàn)的。計(jì)算結(jié)果與試驗(yàn)數(shù)據(jù)的對(duì)比如圖4~圖6 所示。
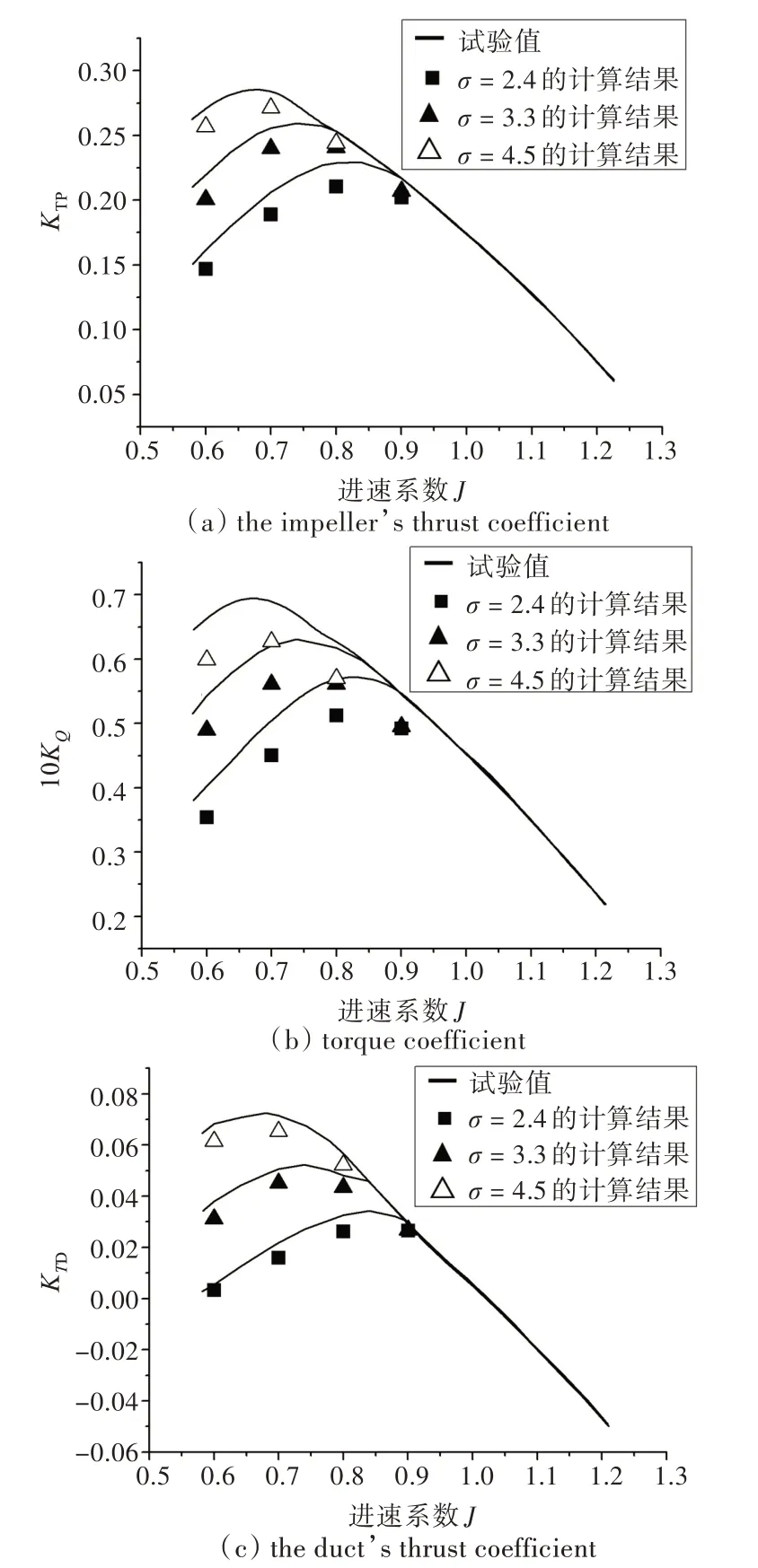
圖4 標(biāo)準(zhǔn)k-ε 湍流模型的空泡性能計(jì)算結(jié)果Fig.4 Cavitation performance calculated by standard k-ε model
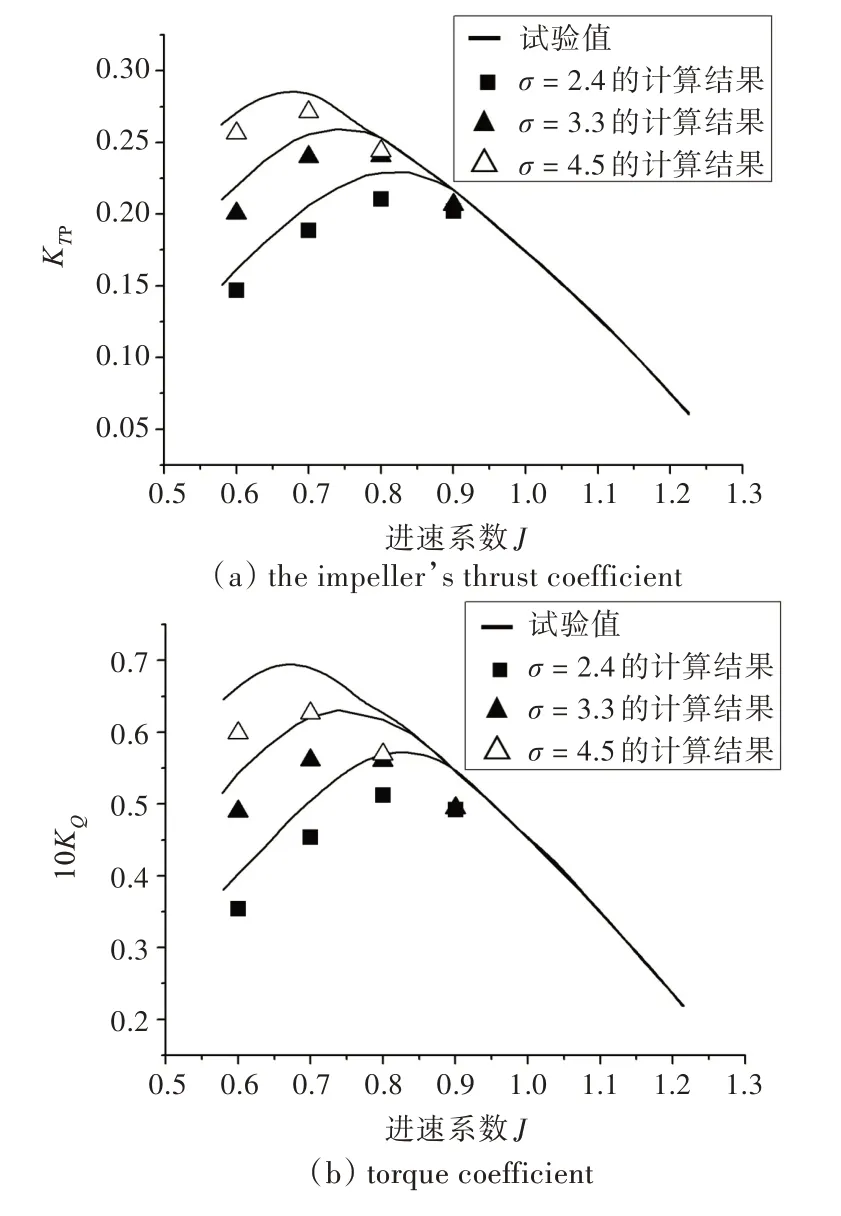
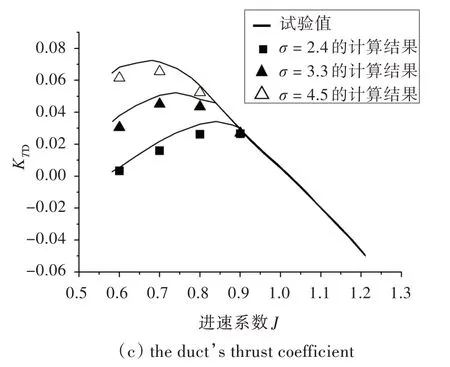
圖5 RNG k-ε 湍流模型的空泡性能計(jì)算結(jié)果Fig.5 Cavitation performance calculated by RNG k-ε model
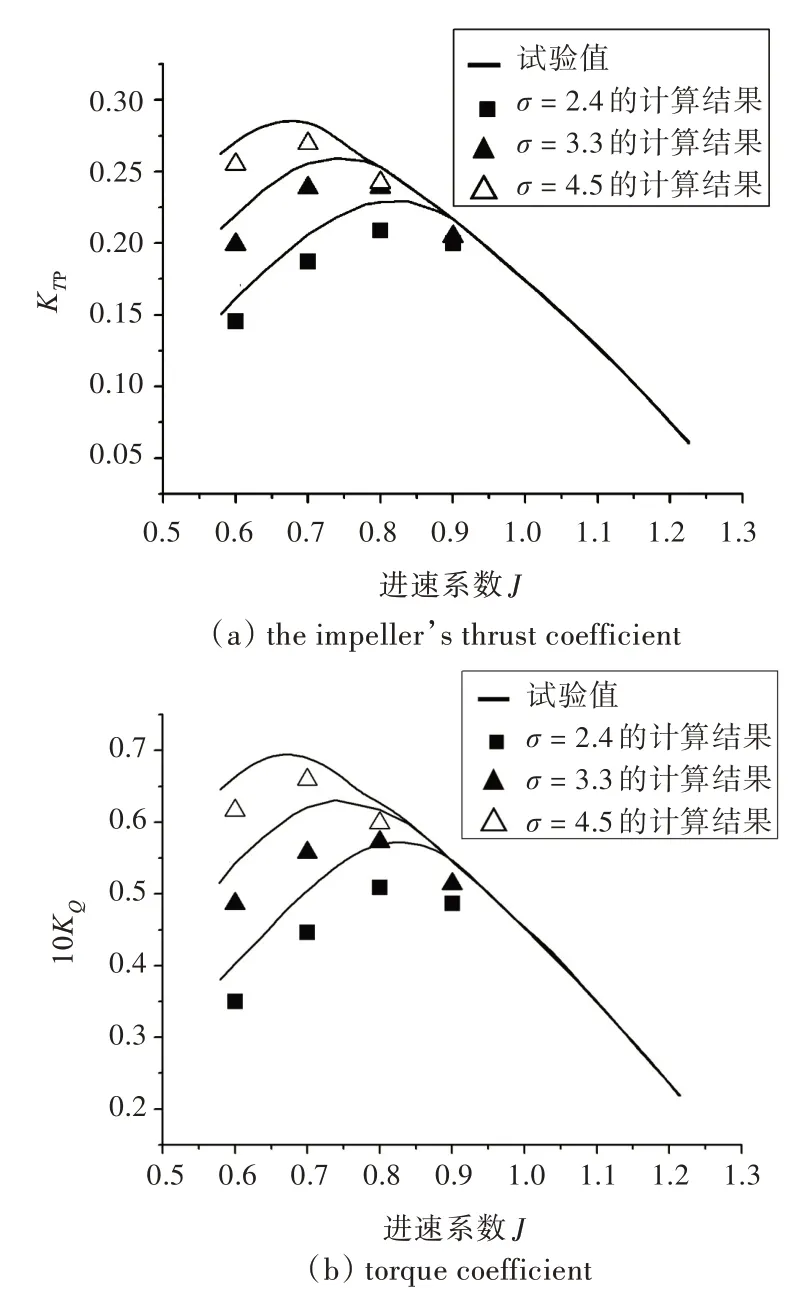
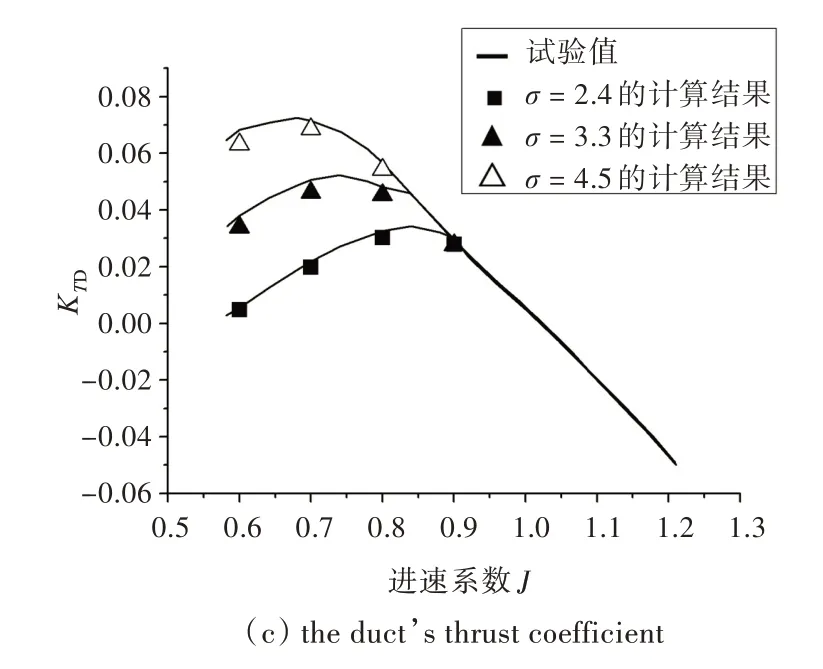
圖6 k-ω 湍流模型的空泡性能計(jì)算結(jié)果Fig.6 Cavitation performance calculated by k-ω model
4 計(jì)算結(jié)果對(duì)比與分析
4.1 相同空化數(shù)不同湍流模型的計(jì)算結(jié)果比較分析
在相同空化數(shù)條件下,對(duì)不同湍流模型計(jì)算結(jié)果的相對(duì)誤差進(jìn)行了比較,如表2 所示(以σ =3.3 為例,其他空化數(shù)條件下的規(guī)律相似)。由表中數(shù)據(jù)可知,標(biāo)準(zhǔn)k-ε 模型與RNG k-ε 模型的計(jì)算結(jié)果相當(dāng)接近;在計(jì)算槳葉的推力系數(shù)KTP和扭矩系數(shù)KQ時(shí),k-ω 模型相比其他兩種模型計(jì)算誤差稍大,但仍在允許范圍內(nèi),推進(jìn)效率η 的計(jì)算誤差均在5%以內(nèi),符合工程預(yù)報(bào)的要求。
另外,從表中還可以看到,隨著進(jìn)速系數(shù)的增大,誤差逐漸減小。尤其是在計(jì)算扭矩系數(shù)時(shí),當(dāng)J <0.8 時(shí),相對(duì)誤差較大,最大達(dá)到了10%以上(k-ω 模型,J = 0.6 時(shí)),而當(dāng)J = 0.9 時(shí),相對(duì)誤差則明顯較小。

表2 σ =3.3 時(shí)3 種不同湍流模型計(jì)算的相對(duì)誤差Tab.2 Calculation errors of different turbulence models at σ =3.3
在計(jì)算過(guò)程中,發(fā)現(xiàn)相對(duì)于另外兩種模型而言,k-ω 模型計(jì)算所用時(shí)間更短,并且更加容易收斂。這種情況與文獻(xiàn)[1]中計(jì)算螺旋槳敞水性能時(shí)的情況相似。
另外,對(duì)于導(dǎo)管螺旋槳的數(shù)值計(jì)算,還要考察導(dǎo)管推力系數(shù)的計(jì)算結(jié)果。同樣以σ =3.3 時(shí)的情況為例,3 種湍流模型的導(dǎo)管推力系數(shù)的計(jì)算結(jié)果相對(duì)誤差如表3 所示。由表中數(shù)據(jù)可以看出,在進(jìn)速系數(shù)較低時(shí),如J =0.6,0.7 時(shí),標(biāo)準(zhǔn)k-ε 模型與RNG k-ε 模型的計(jì)算結(jié)果嚴(yán)重失真,誤差最大接近20%(RNG k-ε 模型,J =0.6時(shí)),而k-ω 模型的計(jì)算結(jié)果則比較穩(wěn)定,始終控制在10%左右。
綜合以上情況可知,k-ω 模型更適于導(dǎo)管螺旋槳空化性能的計(jì)算。
4.2 相同湍流模型不同空化數(shù)的計(jì)算結(jié)果比較分析
同一種湍流模型在不同空化數(shù)條件下的計(jì)算精度并不相同。其中,k-ω 模型對(duì)于不同空化數(shù)的計(jì)算精度如表4 所示,其余兩個(gè)模型的規(guī)律與之相似。由表4 可以發(fā)現(xiàn),σ = 2.4 時(shí)的計(jì)算精度最差,隨著空化數(shù)的增大,計(jì)算精度隨之上升。眾所周知,在較低的空化數(shù)條件下,空化的發(fā)生與發(fā)展均相對(duì)較劇烈;在較低的進(jìn)速系數(shù)(σ <0.7)下,槳葉推力系數(shù)的計(jì)算精度仍在10%以內(nèi),而扭矩系數(shù)KQ的計(jì)算精度則較差,相對(duì)誤差最大達(dá)到13%(σ = 2.4,J = 0.6 時(shí))。進(jìn)速系數(shù)的減小,相當(dāng)于入流速度不變,螺旋槳轉(zhuǎn)速增加,從而導(dǎo)致螺旋槳的空化愈發(fā)劇烈。以上兩種情況可以總結(jié)為,當(dāng)空化較劇烈時(shí),數(shù)值計(jì)算精度將會(huì)下降,其原因可以歸結(jié)為兩點(diǎn):一是本文選用的Ray?leigh-Plesset 空化模型是一種簡(jiǎn)化的空化模型,對(duì)于比較劇烈、復(fù)雜的空化,模型失真比較大,從而造成計(jì)算精度的下降;二是當(dāng)空化發(fā)生劇烈時(shí),對(duì)網(wǎng)格質(zhì)量的要求也進(jìn)一步提高了,但原有的網(wǎng)格并沒(méi)有相應(yīng)改進(jìn),從而造成計(jì)算精度下降。
同樣,仍以k-ω 模型為例考察導(dǎo)管推力系數(shù)的計(jì)算精度。不同空化數(shù)條件下的計(jì)算相對(duì)誤差如表5 所示。由表中可以看出,當(dāng)σ = 2.4時(shí),計(jì)算結(jié)果誤差較大,隨著空化數(shù)的增大,誤差逐漸降低。這種情況同樣可以用上面所述的兩點(diǎn)原因解釋。
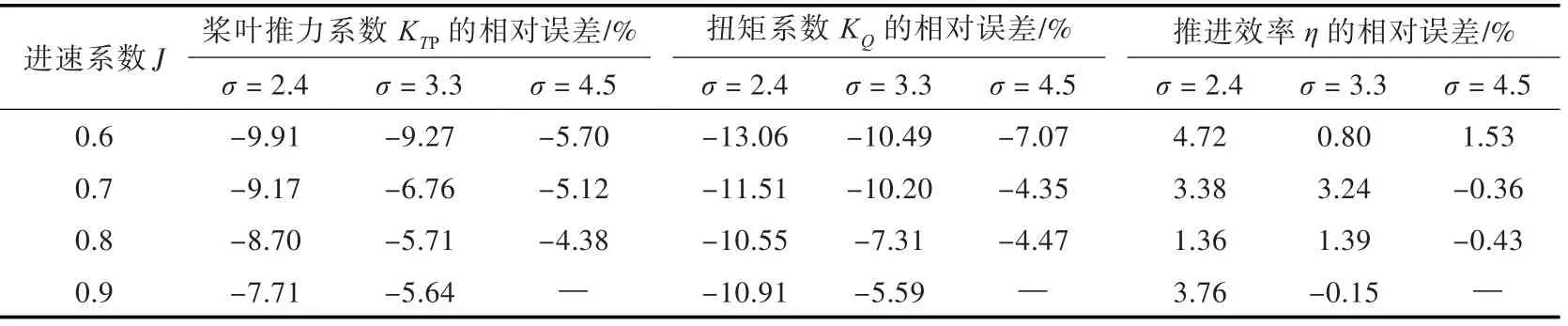
表4 k-ω 湍流模型不同空化數(shù)下數(shù)值計(jì)算相對(duì)誤差Tab.4 Calculation errors of k-ω turbulence model at different cavitation numbers
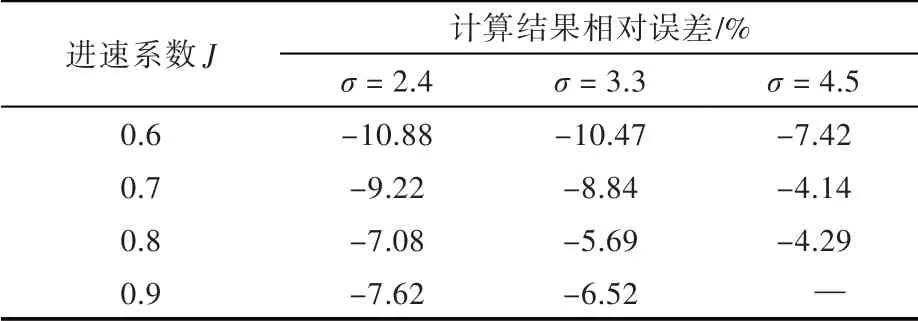
表5 不同空化數(shù)下k-ω 模型計(jì)算導(dǎo)管推力系數(shù)的相對(duì)誤差Tab.5 Calculation errors of duct's thrust coefficient by k-ω turbulence model at different cavitation numbers
4.3 不同湍流模型對(duì)空化數(shù)的敏感性
不同的湍流模型對(duì)空化數(shù)的敏感程度不同。以進(jìn)速系數(shù)J = 0.7 為例,槳葉推力系數(shù)與扭矩系數(shù)的計(jì)算相對(duì)誤差的浮動(dòng)情況如圖7 所示。由圖中可以看出,在計(jì)算槳葉推力系數(shù)時(shí),在不同空化數(shù)條件下,3 種模型計(jì)算的相對(duì)誤差波動(dòng)相似,但在扭矩系數(shù)的計(jì)算中,k-ω 模型的計(jì)算相對(duì)誤差隨空化數(shù)的改變而變化較大。這說(shuō)明k-ω 模型對(duì)空化數(shù)比較敏感。因此,對(duì)于不同的空化數(shù),計(jì)算精度相差會(huì)較大。相比k-ω 模型,k-ε 模型和RNG k-ε 模型對(duì)空化數(shù)不敏感,對(duì)于不同的空化數(shù),計(jì)算時(shí),計(jì)算精度相差較小。
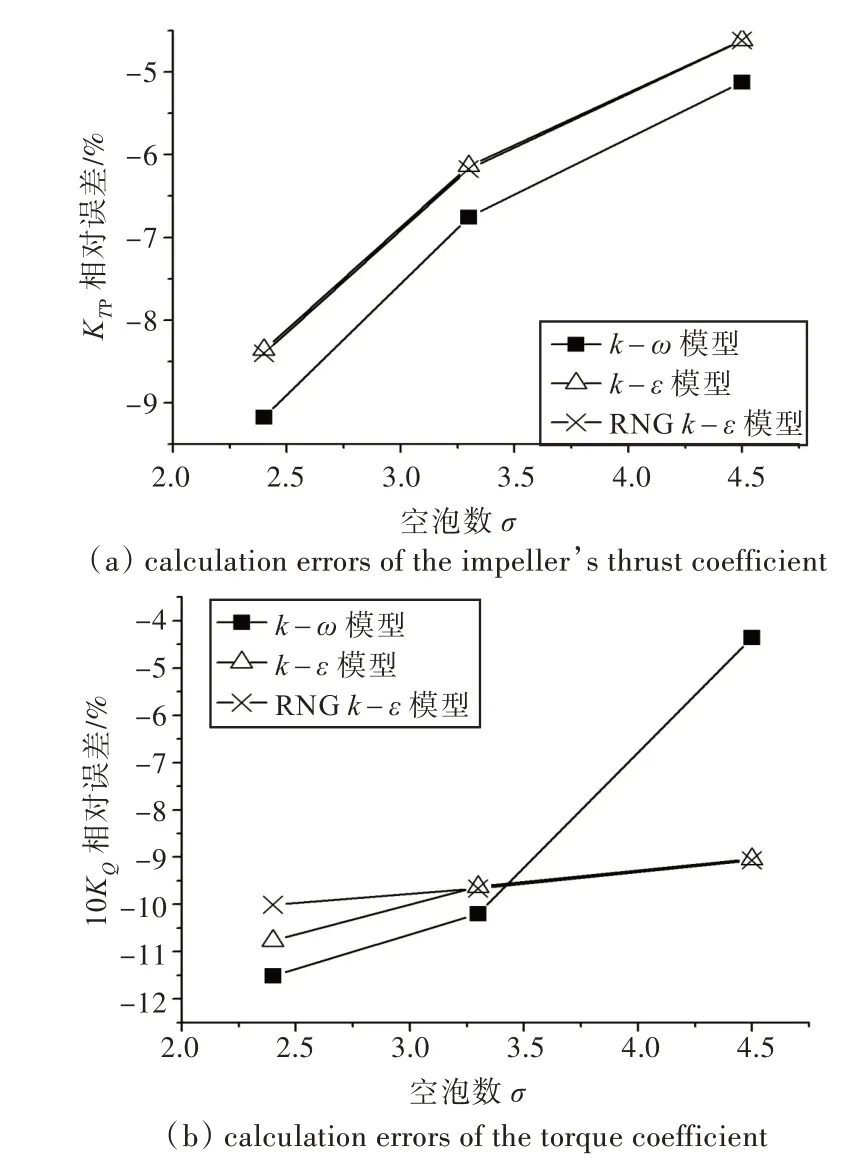
圖7 J =0.7 時(shí)不同湍流模型計(jì)算相對(duì)誤差波動(dòng)Fig.7 The variation of calculation errors of different turbulence models at J =0.7
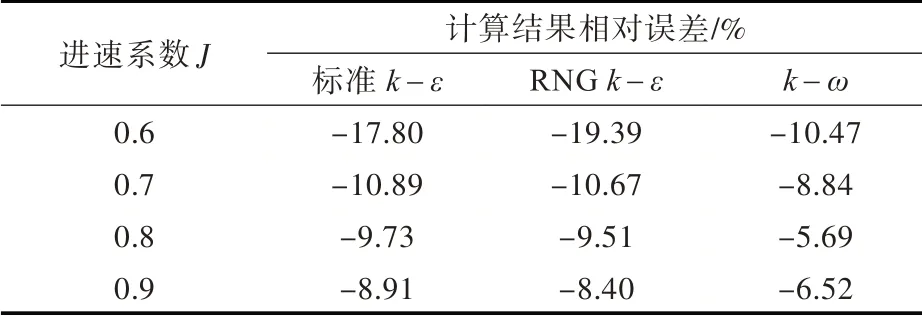
表3 σ =3.3 時(shí)3 種不同湍流模型計(jì)算導(dǎo)管推力系數(shù)的相對(duì)誤差Tab.3 Calculation errors of duct's thrust coefficent by different turbulence models at σ =3.3
5 結(jié) 論
本文借助于CFD 軟件,采用結(jié)構(gòu)化與非結(jié)構(gòu)化網(wǎng)格相結(jié)合的方法,對(duì)導(dǎo)管螺旋槳的空泡性能進(jìn)行了數(shù)值模擬,對(duì)比分析了不同湍流模型、不同空化數(shù)條件下的計(jì)算結(jié)果精度,得出以下結(jié)論:
1)在對(duì)導(dǎo)管螺旋槳進(jìn)行不考慮空化的敞水性能計(jì)算時(shí),3 種湍流模型的計(jì)算精度均較好,滿足工程預(yù)報(bào)的精度要求。
2)對(duì)導(dǎo)管螺旋槳進(jìn)行空化性能計(jì)算時(shí),標(biāo)準(zhǔn)k-ω 模型更加穩(wěn)定,計(jì)算所用時(shí)間更短,且更加容易收斂。但對(duì)于槳葉推力系數(shù)的計(jì)算,k-ω 模型的計(jì)算精度不及標(biāo)準(zhǔn)k-ε 模型與RNG k-ε 模型,但是三者的計(jì)算相對(duì)誤差都在允許范圍內(nèi)。在對(duì)導(dǎo)管推力系數(shù)的計(jì)算中,尤其是在低進(jìn)速系數(shù)下,標(biāo)準(zhǔn)k-ε 模型和RNG k-ε 模型嚴(yán)重失真,但是k-ω 模型的計(jì)算精度仍然能夠得到保證。綜合以上情況,k-ω 模型相比標(biāo)準(zhǔn)k-ε 模型和RNG k-ε 模型更加適合導(dǎo)管螺旋槳的空化性能計(jì)算。
3)在空化數(shù)或進(jìn)速系數(shù)較低時(shí),空化的發(fā)生相對(duì)來(lái)說(shuō)會(huì)較劇烈,在這種情況下進(jìn)行空泡性能的計(jì)算計(jì)算精度不理想。若想提高精度,需要選取更為精確的空化模型,或進(jìn)一步調(diào)整網(wǎng)格,提高網(wǎng)格質(zhì)量。
4)在不同空化數(shù)條件下,標(biāo)準(zhǔn)k-ε 模型與RNG k-ε 模型計(jì)算的相對(duì)誤差波動(dòng)較小,而k-ω模型則較大。這說(shuō)明在計(jì)算時(shí),k-ω 模型對(duì)空化數(shù)σ 比較敏感。
[1]呂曉軍,周其斗,紀(jì)剛,等.導(dǎo)管螺旋槳敞水性能的預(yù)報(bào)和比較[J]. 海軍工程大學(xué)學(xué)報(bào),2010,22(1):24-30.LV Xiaojun,ZHOU Qidou,JI Gang,et al. Prediction and comparison of open water performance of ducted propeller[J]. Journal of Naval University of Engineer?ing,2010,22(1):24-30.
[2]曾文德,王永生,劉承江. 混流式噴水推進(jìn)器水動(dòng)力性能的數(shù)字模擬[J]. 武漢理工大學(xué)學(xué)報(bào),2010,32(6):95-100.ZENG Wende,WANG Yongsheng,LIU Chengjiang.Numerical simulation of hydrodynamic performance of the mixed flow pump for marine waterjet propulsion[J]. Journal of Wuhan University of Technology,2010,32(6):95-100.
[3]YAN Weicheng,SHI Depan,LUO Zhenghong,et al.Three-dimensional CFD study of liquid-solid flow be?haviors in tubular loop polymerization reactors:The ef?fect of guide vane[J]. Chemical Engineering Science,2011,66(18):4127-4137.
[4]楊瓊方,王永生,張志宏. 螺旋槳空化崩潰性能圖譜的多相流模擬[J]. 華中科技大學(xué)學(xué)報(bào)(自然科學(xué)版),2012,40(2):18-22.YANG Qiongfang,WANG Yongsheng,ZHANG Zhi?hong. Multiphase flow simulation and propeller cavita?tion breakdown performance maps[J]. Journal of Hua?zhong University of Science and Technology(Nature Science),2012,40(2):18-22.
[5]楊瓊方,王永生,張志宏. 非均勻進(jìn)流對(duì)螺旋槳空化水動(dòng)力性能的影響[J].水動(dòng)力學(xué)研究與進(jìn)展,2011,26(5):538-550.YANG Qiongfang,WANG Yongsheng,ZHANG Zhi?hong.Effects of non-uniform inflow on propeller cavita?tion hydrodynamics[J]. Chinese Journal of Hydrody?namics,2011,26(5):538-550.
[6]楊正軍,王福軍,劉竹青,等. 基于CFD 的軸流泵空化特性預(yù)測(cè)[J]. 排灌機(jī)械工程學(xué)報(bào),2011,29(1):11-15.YANG Zhengjun,WANG Fujun,LIU Zhuqing,et al.Prediction of cavitation performance of axial-flow pump based on CFD[J]. Drainage and Irrigation Ma?chinery,2011,29(1):11-15.
[7]余云超,張偉,陳紅勛. 軸流泵模型汽蝕特性的數(shù)值模擬[J].上海大學(xué)學(xué)報(bào)(自然科學(xué)版),2011,17(5):653-656.YU Yunchao,ZHANG Wei,CHEN Hongxun. Numeri?cal simulation of cavitation behavior of axial pump mod?el[J]. Journal of Shanghai University(Natural Sci?ence),2011,17(5):653-656.
[8]錢忠東,黃社華.四種湍流模型對(duì)空化流動(dòng)模擬的比較[J].水科學(xué)進(jìn)展,2006,17(2):203-208.QIAN Zhongdong,HUANG Shehua. Comparison and analysis of computed results for cavitating flow with four turbulence mode[J]. Advances In Water Science,2006,17(2):203-208.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
