單繞組無軸承開關(guān)磁阻電動機繞組電流計算
2013-01-31 09:02:34鄧智泉馮紹兵
微特電機 2013年4期
李 群,鄧智泉,曹 鑫,馮紹兵
(南京航空航天大學(xué),江蘇南京210016)
0 引 言
基于磁軸承與電機相結(jié)合的思想,將無軸承技術(shù)應(yīng)用于開關(guān)磁阻電動機(以下簡稱SRM),形成了無軸承開關(guān)磁阻電動機(以下簡稱BSRM)。BSRM除了具有磁懸浮電機摩擦小、速度高、壽命長等優(yōu)點之外,同時還具備普通SRM高容錯性、高速適應(yīng)性強和耐高溫性能好等優(yōu)點,因而在高速電機、航天航空和軍民兩用等領(lǐng)域有獨特的應(yīng)用優(yōu)勢。近些年來,SRM的無軸承技術(shù)逐漸成為研究的熱門方向。
BSRM的研究最早始于日本學(xué)者,傳統(tǒng)的BSRM是在普通BSRM的定子齒極上再增加一套繞組用于電機懸浮,通過對定子齒極上兩套繞組的電流大小以及導(dǎo)通的寬度進行控制,使電機能夠懸浮旋轉(zhuǎn)[1-3]。但是,雙繞組 BSRM 需要設(shè)計兩套繞組,同時還存在著裝配復(fù)雜等一系列問題[4]。因此單繞組BSRM的研究越來越受到關(guān)注。目前,對單繞組BSRM的研究主要集中在12/8、8/6齒極結(jié)構(gòu)以及8/10等定轉(zhuǎn)子變化結(jié)構(gòu)上[5-17]。美國學(xué)者 B.B.Choi以及中國臺灣的學(xué)者Yang S.M.對12/8極單繞組BSRM技術(shù)進行了研究[5-7]。其電機的各個定子齒極上無需額外增加繞組,本體結(jié)構(gòu)與普通的SRM完全相同,通過對繞組電流的大小進行合理的控制,即能使電機運行在懸浮的狀態(tài)。對8/6極單繞組BSRM技術(shù)進行研究的主要是學(xué)者Chen L.等人[8-10]。他們采用在一相導(dǎo)通的周期內(nèi)給該相三個定子齒極繞組同時勵磁的方法,實現(xiàn)了電機的懸浮旋轉(zhuǎn)。
除此之外,一些學(xué)者還從改變電機定子和轉(zhuǎn)子結(jié)構(gòu)的角度出發(fā),研究了一些結(jié)構(gòu)較為特殊的BSRM。文獻[17]提出一種將SRM轉(zhuǎn)子與磁軸承復(fù)合在一起的結(jié)構(gòu)。該種結(jié)構(gòu)的電機從轉(zhuǎn)子軸向上看可分為SRM轉(zhuǎn)子與磁軸承轉(zhuǎn)子兩個部分,其中疊片的結(jié)構(gòu)為凸極形的是SRM轉(zhuǎn)子,而圓柱形的則為磁軸承轉(zhuǎn)子,通過控制開通相繞組電流,產(chǎn)生所需要的懸浮力與轉(zhuǎn)矩。另外還有一種寬窄齒相隔分布結(jié)構(gòu)的8/10極單繞組BSRM。這種結(jié)構(gòu)的電機采用雙相導(dǎo)通模式,每次導(dǎo)通寬齒繞組和窄齒兩套繞組,寬齒四套繞組為懸浮力相,窄齒兩套繞組為轉(zhuǎn)矩相,由于懸浮力和轉(zhuǎn)矩分別由不同的齒提供,因而該結(jié)構(gòu)的BSRM某種程度上實現(xiàn)了轉(zhuǎn)矩和懸浮力的解耦控制。
本文主要是基于雙繞組BSRM的研究已經(jīng)相對完善,同時通過單繞組BSRM和雙繞組BSRM磁勢相等的原則,建立單、雙繞組BSRM之間的聯(lián)系,并解算出電機各繞組電流,為以后單繞組BSRM的懸浮控制奠定基礎(chǔ),并分析了單、雙繞組BSRM內(nèi)在聯(lián)系,對比了其工作區(qū)域,指出在相同匝數(shù)的情況下,單繞組BSRM工作區(qū)域比雙繞組BSRM大。
1 雙繞組BSRM工作原理
雙繞組BSRM在普通SRM的定子齒極上額外增加了一套繞組,其基本結(jié)構(gòu)如圖1所示。圖中,Nma表示主繞組,且一相四個定子齒極上的主繞組相串聯(lián),主要用來提供轉(zhuǎn)矩;Nsa1、Nsa2分別表示α和β方向上的懸浮繞組,其一相正對方向上的兩個懸浮繞組相串聯(lián),用來提供不平衡的徑向力。ima為主繞組電流,其所產(chǎn)生的磁通由粗實線表示,isa1、isa2分別為α和β方向上懸浮繞組的電流,由其產(chǎn)生的磁通用虛線表示,下標(biāo)“+”、“-”則表示電流的流入與流出。A、B、C三相的繞組結(jié)構(gòu)相同,但B、C兩相與A相分別有-30°和+30°的空間位置差。將A相作為基準(zhǔn),定義直角坐標(biāo)系,橫軸用α(a1)表示,縱軸用β(a2)表示,B相和C相的坐標(biāo)軸定義與A相相同。
若A相通入圖示的電流,那么氣隙1處的電流ima和isa1將產(chǎn)生相同方向的磁場,其磁密將會增大,氣隙2處則相反。這樣,疊加之后的磁場將會沿著α方向產(chǎn)生一個向右的磁拉力Fα。此時若不改變主繞組的電流,而是反向通入懸浮繞組的電流isa1,則產(chǎn)生的磁拉力將會反向。同理,沿著β方向同樣能夠產(chǎn)生徑向的磁拉力Fβ。這樣轉(zhuǎn)軸的位移采用負反饋控制之后,就能夠控制懸浮力的大小以及方向,從而使轉(zhuǎn)軸懸浮旋轉(zhuǎn)。
B、C兩相的原理與A相完全相同,只需在控制的過程中對B相和C相做一定的坐標(biāo)變換即可。
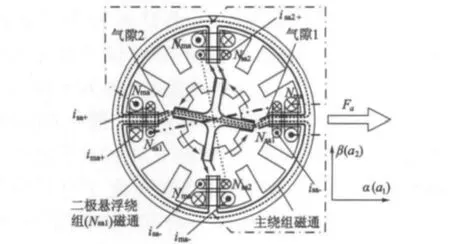
圖1 雙繞組BSRM懸浮力產(chǎn)生原理圖
2 雙繞組BSRM數(shù)學(xué)模型
目前大都采用虛位移的方法建立BSRM的數(shù)學(xué)模型,主要可分為以下幾個步驟:(1)將磁場進行分割,求出氣隙磁導(dǎo);(2)運用等效磁路的方法得出一相的電感矩陣,同時以該矩陣求解出電機磁場的儲能;(3)依據(jù)機電之間能量轉(zhuǎn)換的基本原理,將磁場的儲能對轉(zhuǎn)軸的位置角以及徑向位移分別求偏導(dǎo),最終得出轉(zhuǎn)矩表達式和懸浮力的表達式[20]。在不考慮漏磁通以及磁路飽和的情況下,懸浮力的數(shù)學(xué)表達式如下:

上述表達式并未將α方向和β方向上徑向懸浮力之間的耦合因素考慮進去。若考慮懸浮力之間的耦合因素,則要對傳統(tǒng)的數(shù)學(xué)模型進行改進[18],改進后的模型將邊緣的磁通路徑近似成橢圓形,然后分割求取氣隙的磁導(dǎo),有效解決了繞組電感頂部凹陷的問題。基于改進后的數(shù)學(xué)模型,懸浮力和轉(zhuǎn)矩的數(shù)學(xué)表達式可以分別表示:
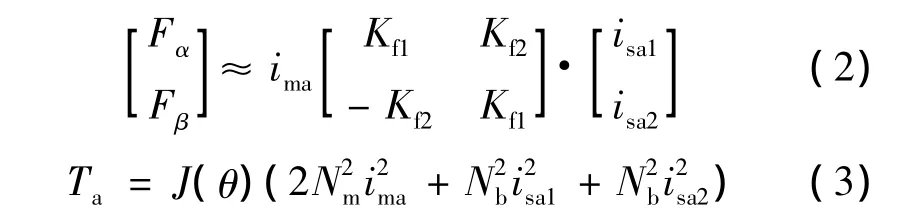
上述表達式中的Kf1和Kf2以及J(θ)是只與轉(zhuǎn)子的位置角以及電機的自身機械參數(shù)相關(guān)的函數(shù),文獻[22]有相關(guān)公式具體的推導(dǎo)過程。該模型更為準(zhǔn)確地描述了雙繞組BSRM。
3 單繞組BSRM工作原理
與雙繞組BSRM不同,單繞組BSRM定子齒上無需額外增加繞組,只需給一相四個齒極繞組通以不同的電流,就能使轉(zhuǎn)軸懸浮旋轉(zhuǎn)。圖2展示了12/8極單繞組BSRM的基本結(jié)構(gòu)。
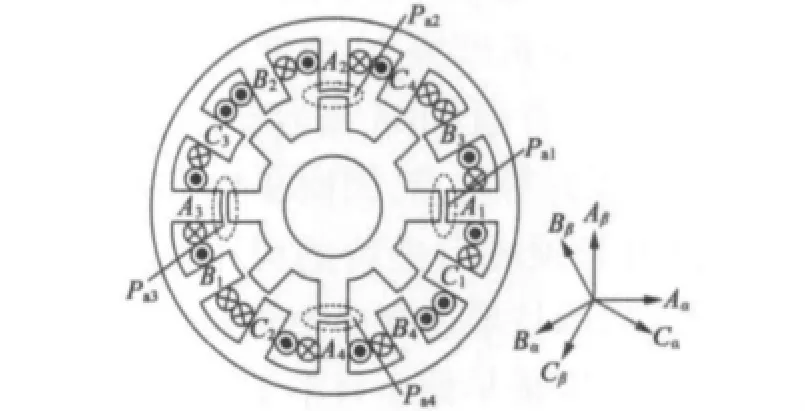
圖2 單繞組BSRM結(jié)構(gòu)示意圖
當(dāng)A1繞組電流大于A3繞組電流時,A1處磁密大于A3處磁密,其合成之后的磁場就會沿著α方向產(chǎn)生一個向右的磁拉力Fα。若A3繞組電流大于A1繞組電流,則產(chǎn)生的徑向力方向?qū)⑾喾础R罁?jù)同樣的原理,沿著β方向同樣能夠產(chǎn)生徑向的磁拉力Fβ。類似地,B相、C相亦是如此。因而,只需對轉(zhuǎn)軸的位移采用負反饋控制,就可以使徑向磁拉力的大小以及方向發(fā)生改變,從而達到轉(zhuǎn)軸懸浮旋轉(zhuǎn)目的。
由此可見,單繞組BSRM和雙繞組BSRM本質(zhì)上都是通過改變徑向相對齒極氣隙處磁密的不同來改變懸浮力的大小和方向。
4 單、雙繞組BSRM等效原理
圖3(a)、圖3(b)分別為單繞組和雙繞組BSRM單相等效磁路圖。
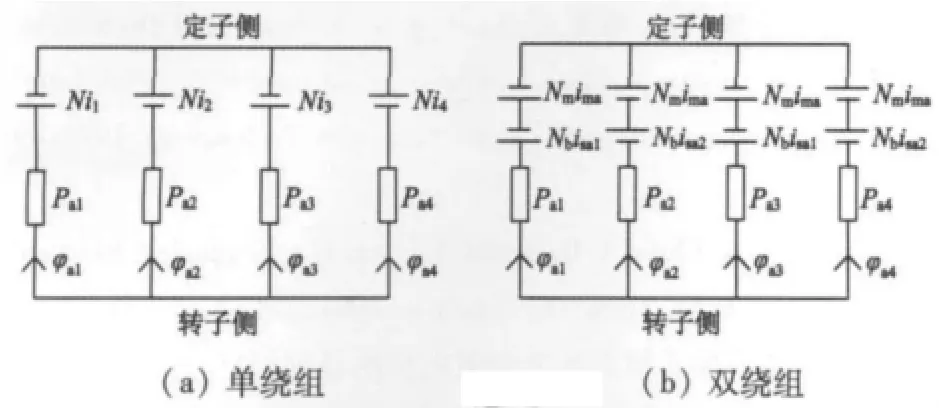
圖3 BSRM單相等效磁路圖
等效的前提是,雙繞組單個齒極總匝數(shù)和單繞組單個齒極總匝數(shù)相等。根據(jù)磁勢相等的原則,可得:

由雙繞組公式[18]知,轉(zhuǎn)矩T和懸浮力F表達式可改寫成:

由式(4)~式(13)解得:


5 仿真驗證
為驗證等效原理的正確性,本文選取總匝數(shù)為18,主繞組的匝數(shù)為9、懸浮繞組的匝數(shù)同樣為9的單、雙繞組BSRM仿真參數(shù),同時給出了一組懸浮力F以及轉(zhuǎn)矩T(絕對值),利用雙繞組公式計算出主繞組電流和懸浮繞組電流,再利用等效原理計算出單繞組各繞組電流,分別用Ansys軟件進行有限元仿真。
圖4(a)為有限元轉(zhuǎn)矩的仿真結(jié)果曲線,T為給定轉(zhuǎn)矩,T1為雙繞組仿真結(jié)果,T2為φ=30°時的單繞組仿真結(jié)果,T3為φ=45°時的單繞組仿真結(jié)果。從圖中可以看出,單、雙繞組BSRM轉(zhuǎn)矩完全重合,只是在轉(zhuǎn)子位置角為15°時,仿真轉(zhuǎn)矩與給定轉(zhuǎn)矩存在偏差,這是由于雙繞組理論本身在15°時的不夠精確導(dǎo)致,但等效依然正確。圖4(b)為懸浮力的仿真結(jié)果曲線,F(xiàn)為給定的懸浮力,F(xiàn)1為雙繞組仿真結(jié)果,F(xiàn)2為φ=30°時的單繞組仿真結(jié)果,F(xiàn)3為φ=45°時的單繞組仿真結(jié)果。
為進一步驗證等效原理的正確性,本文用MATLAB軟件搭建單雙繞組BSRM仿真模型,選取總匝數(shù)為30,主繞組和懸浮繞組匝數(shù)都為15,給定懸浮力Fα=60、Fβ=40,主繞組電流為15 A的單、雙繞組BSRM電機仿真參數(shù)。圖4(c)、圖4(d)分別為單、雙繞組BSRM懸浮力仿真結(jié)果,圖4(e)為單繞組BSRM電流仿真波形,圖4(f)為雙繞組BSRM 電流仿真波形,圖中的為等效后的單繞組電流。圖4(g)、圖4(h)分別為單、雙繞組BSRM轉(zhuǎn)矩仿真波形。從仿真結(jié)果可以看出,無論單繞組BSRM還是雙繞組BSRM,懸浮力跟蹤良好,在磁勢相等的情況下,單雙繞組BSRM輸出的懸浮力和轉(zhuǎn)矩一致。
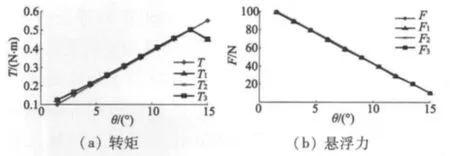
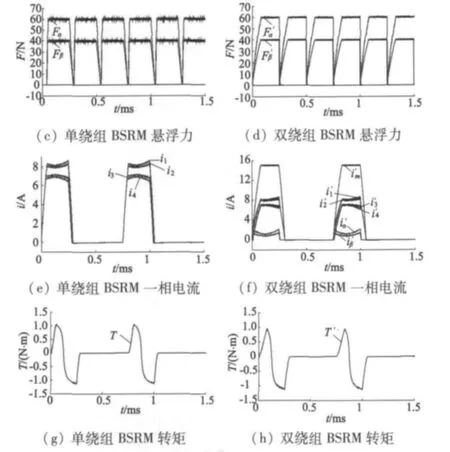
圖4 單、雙繞組BSRM仿真參數(shù)
基于以上有限元分析和MATLAB動態(tài)建模仿真結(jié)果,無論轉(zhuǎn)矩還是懸浮力,單繞組BSRM的懸浮力和轉(zhuǎn)矩分布均與雙繞組BSRM結(jié)果吻合,從而驗證了等效原理的正確性和有效性。
6 工作區(qū)域比較
為了對比單、雙繞組BSRM的工作區(qū)域,選取總匝數(shù)為18,雙繞組BSRM主繞組和懸浮繞組匝數(shù)分別取9、9(K=1)和 12、6(K=2),繞組限流值為 20 A,圖5為單、雙繞組BSRM工作區(qū)域?qū)Ρ葓D。
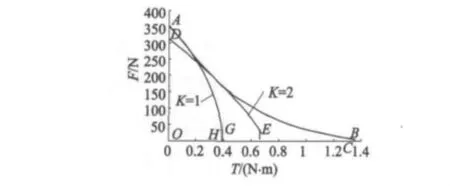
圖5 工作區(qū)域的比較
圖中區(qū)域OABC為單繞組工作區(qū)域,OAGH為主繞組和懸浮繞組都為9的雙繞組BSRM工作區(qū)域,ODEF為主繞組12,懸浮繞組為6的雙繞組BSRM工作區(qū)域。可以看出,在總匝數(shù)一定的情況下,單繞組BSRM比雙繞組BSRM工作區(qū)域大,這是單繞組BSRM相對于雙繞組BSRM最明顯的優(yōu)勢。
7 結(jié) 語
等效原理利用現(xiàn)有雙繞組BSRM的理論成果,能夠精確計算出單繞組BSRM懸浮和旋轉(zhuǎn)所需的各繞組電流,有助于繼承和發(fā)展雙繞組BSRM的研究體系,為今后單繞組BSRM控制策略的研究提供新的視角。同時,單繞組BSRM比雙繞組BSRM工作區(qū)域大,更具研究價值。
[1]Chiba A,F(xiàn)ukao T.super high speed electical machine[C]//Power Engineering society general meeting.2004,6(2):1272-1275.
[2]Takemoto M,shimada K,Chiba A,et al.A design and characteristics of switched reluctance type bearingless motors[C]//4th International Symposium on Magnetic Suspensio Techonology.1998:49-63.
[3]Takemoto M,Chiba A.Improved Anaiysis of a Bearingless Switched Motor[J].IEEE Trans.Ind.Applicat.2001,37(1):26-34.
[4]曹鑫.12/8極無軸承開關(guān)磁阻電機的研究[D].南京:南京航空航天大學(xué),2010.
[5]Choi B B,Siebert M.A bearingless switched reluctance motor for high specific power applications[C]//42nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit.2006.
[6]Liu W T,Yang S M.Modeling and control of a self-bearing switched reluctance motor[C]//2005 Industry Applications Conference,14th IAS Annu Meeting.Princeton:IAS,2005:2720-2725.
[7]Lin F C,Yang S M.Self-bearing control of a switched reluctance motor using sinusoidal currents[J].IEEE Trans.Power Electron.,2007,22(6):2518-2526.
[8]Chen L,Hofmann W.Analytically computing winding currents to generate torque and levitation force of a new bearingless switched reluctance motor[C]//12th International Power Electronics and Motion Control Conference.2006:1058-1063.
[9]Chen L,Hofmann W.Performance characteristics of one novel switched reluctance bearingless motor drive[C]//Power Conversion Conference 2007(PCC '07).2007:608-613.
[10]Chen L,Hofmann W.Design procedure of bearingless high-speed switched reluctance motors[C]//SPEEDAM 2010,Pisa Italy.2010.
[11]Wang H,Lee D H,Ahn J W.Calculation of suspending force for new bearingless switched reluctance motor[C]//Proceedings of the 11th International Symposium on Magnetic Bearings(ISMB-11).Nara,Japan,2008:366-372.
[12]Wang Huijun,Park T-H,Kim T-H,et al.Novel bearingless switched reluctance motor with hybrid stator poles:Concept,A-nalysis,Design and Experimental Verification[C]//The 11th International Conference on Electrical Machines and Systems.2008:3358-3363.
[13]Lee D H,Wang Huijun,Ahn J W.Modeling and control of novel bearingless switched reluctance motor[C]//IEEE Energy Conversion Congress and Exposition 2009(ECCE2009).2009:276-281.
[14]Guan Zhongyu,Lee D H,Ahn J W,et al.A compensation strategy of suspending force in hybrid type stator pole bearingless switched reluctance motor[C]//2011 International Conference on Electrical Machines and Systems(ICEMS).2011.
[15]Xu Zhenyao,Lee D H,Zhang Fengge,et al.Hybrid pole type bearingless switched reluctance motor with short flux path[C]//2011 International Conference on Electrical Machines and Systems.2011.
[16]Wei Peng,Lee D H,Ahn J W.Design and analysis of double stator type bearingless switched reluctance motor[J].Transactions of the Korean Institute of Electrical Engineers,2011,60:746-752.
[17]Morrison C R,Siebert M W,Ho E J.Electromagnetic forces in a hybrid magnetic-bearing switched-reluctance motor[J].IEEE Trans.on Magnetics,2008,44(12):4626-4638.
[18]鄧智泉,楊鋼,張媛,等.一種新型的無軸承開關(guān)磁阻電機數(shù)學(xué)模型[J].中國電機工程學(xué)報,2005,25(9):139-146.
[19]李倬,葛寶明.一種改進的無軸承開關(guān)磁阻電機數(shù)學(xué)模型[J].電機與控制學(xué)報,2009,13(6):850-856.
[20]吳建兵,孫玉坤,吉敬華.磁懸浮開關(guān)磁阻電動機研究[J].微電機,2007,40(7):79-85.
[21]孫玉坤,吳建兵,項倩雯.基于有限元法的磁懸浮開關(guān)磁阻電機數(shù)學(xué)模型[J].中國電機工程學(xué)報,2007,27(12):33-40.
[22]楊鋼.無軸承開關(guān)磁阻電動機的基礎(chǔ)研究[D].南京:南京航空航天大學(xué),2008.