美國新一代多用途驅逐艦DDG-1000工程控制系統分析
2013-01-11 06:10:48,,,,
船海工程 2013年4期
,,, ,
(中國船舶重工集團公司第七〇三研究所,哈爾濱 150078)
美國海軍新型多任務驅逐艦朱姆沃爾特(DDG-1000)預計2012年底下水,2014年服役。作為美國海軍21世紀的重點項目,DDG-1000上采用了諸多先進技術,其任務系統的結構與上一代驅逐艦DDG-51相比,有了非常大的改進,以最佳人員配置為目標,推動艦船的系統設計到達了空前的自動化水平。整個船舶控制系統(SCS)采用分層結構保證了艦船的機動性和作戰能力。在船舶控制系統中,用于工程設備的高度先進和綜合的控制系統,被稱為工程控制系統(ECS),DDG-1000的工程控制系統比美國其它任何成熟的海軍水面艦艇的機械控制系統(MCS)更加復雜。
DDG-1000的工程控制系統包括綜合電力系統(IPS)、輔助控制系統(ACS)和自動損管(ADC)系統3個子系統,研究工程控制系統有助于更好地理解DDG-1000的自動損管系統。此外,由于DDG-1000項目與CVN 21項目基本同步,二者的很多設備是通用的,設計理念是相通的,研究DDG-1000的工程控制系統對研究CVN 78(CVN 21首艦)的機械監控系統有很好的借鑒作用[1]。
1 DDG-1000項目介紹
1.1 項目綜述
DDG-1000“朱姆沃爾特”級驅逐艦是美國海軍下一代多任務的水面戰艦。該艦上的控制系統是美國海軍已經研制的最先進的控制系統,為了實現DDG-1000的最佳人員配置目標,控制系統中采用了大量先進的智能設備。
DDG-1000的船舶整體架構由多個層次組成:第0層為操作環境(Operational Context);第1層為平臺環境(platform context);第2層為分割環境(segment context),分割環境包括C4I系統分割、戰斗系統分割和船舶系統分割等;第3層為要素環境(element context);第4層為組件環境(component context)。
DDG-1000項目的重點是系統設計和通過使用工程開發模型(EDM)來降低研制風險。該艦的船體機電(HM&E)系統中最受關注的兩個工程開發模型是綜合電力系統模型和自動滅火系統模型。
1.2 船舶控制系統和工程控制系統的構成
圖1是DDG-1000的任務系統結構圖,包括工程控制系統(ECS)、損害決策和評估(DDA)系統、綜合艦橋系統(IBS)、航海系統(NSC)和光電監控(ESV)系統以及船舶域控制器(SDC)。船舶域控制器的主要用途是從更高級別的指揮與控制系統接收任務并將其翻譯成指令并發給船舶控制系統。本文重點研究工程控制系統。
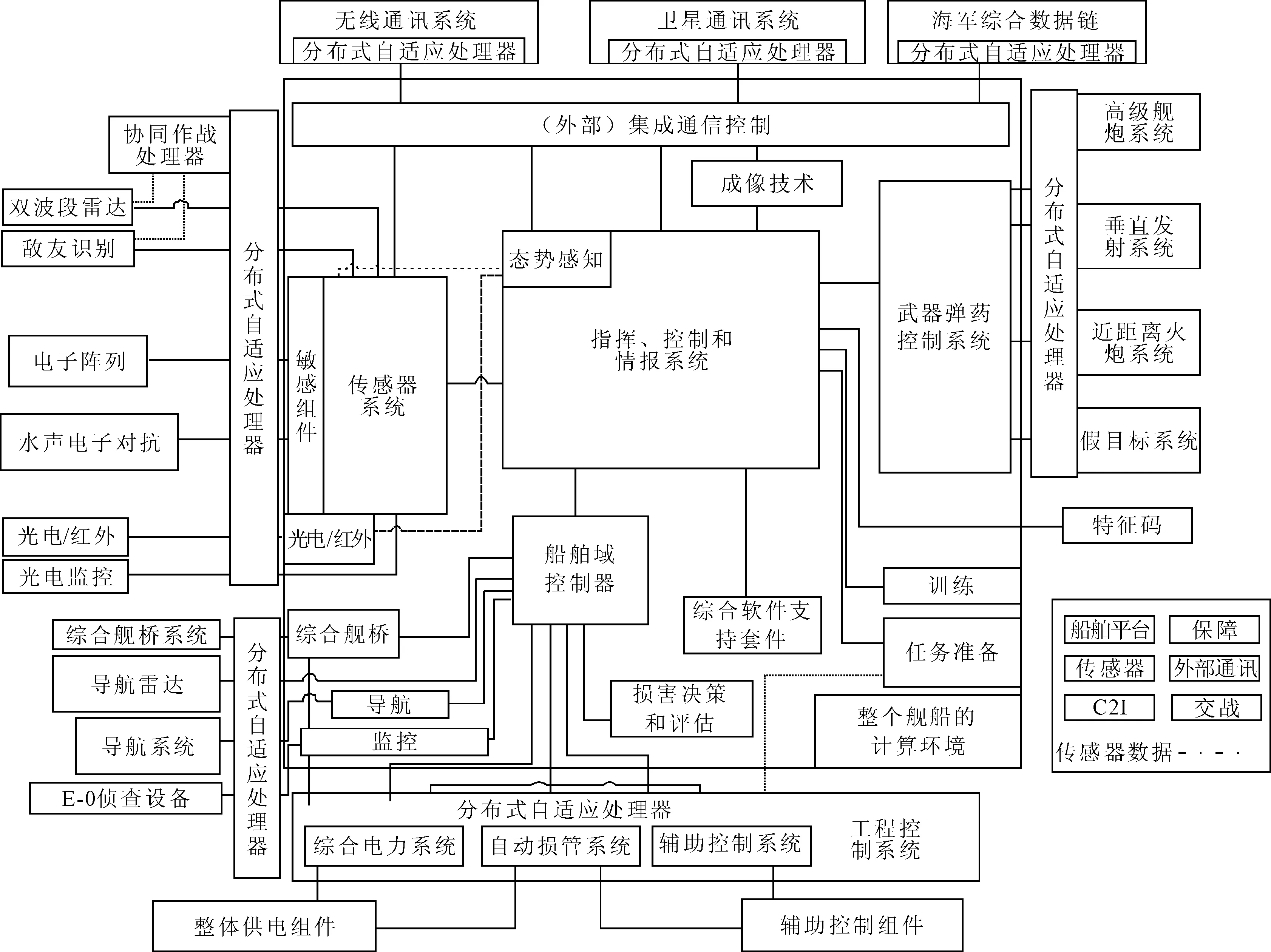
圖1 DDG-1000的任務系統
工程控制系統的設計團隊分為硬件和軟件2個組。軟件組的主要工作內容是3個軟件集合的設計,這3個軟件集合分別為綜電力系統控制集合(MIPS)、輔助控制集合(MACS)和自動損管集合(MADC)。
2 工程控制系統
2.1 工程控制系統結構
艦上多個“域”為操作需求文檔(ORD)中最高等級船舶操作規范提供合理的分解。這些“域”對集中區域的相關功能進行分解,例如,船舶系統分割被分解成結構系統、綜合電力系統、輔助系統、損管系統和其它要素。這些要素被定義為一組組件級硬件和軟件需求,并被進一步分組和分解成易管理的部件,這種分解被稱為承包商工作分解結構或CWBS。本文重點研究船舶控制系統的要素中工程控制系統部分的機械控制自動化,它被設計用來實現作戰需求文件中對DDG-1000的人員配置要求。對于軟件,承包商工作分解結構將分割分解為要素,同時進一步分解為組件。
然而,為了能充分理解工程控制系統控制功能,與船舶系統分割域外的一些特殊功能的相關性也必須考慮。在DDG-1000上的自動化層次中,最高級別的控制指令從指揮、控制和情報(CCI)系統要素中的軟件發出,跨越分割進入船舶控制系統要素。另外,DDG-1000的人機界面(HCI)位于人機接口架構(HII)要素(位于全船計算環境架構(TSCE-I)系統分割中)中,向包括指揮、控制和情報(CCI)系統和船舶控制系統在內的許多應用提供人性化操作界面。值得注意的是,軟件功能的層次結構與承包商工作分解結構不同。關于這類交叉的域的接口還有一些其他的例子,在本文中將會進一步討論[2]。
2.2 軟件層次結構
在軟件層次結構中,指揮、控制和情報系統與船舶域控制器之間,以及船舶域控制器與工程控制系統之間接口的抽象概念上的層次按照固有的功能劃分。指揮和控制系統通過綜合艦船計劃(ISP)在任務層定義了艦船的需求,這使得一系列的任務被發送到艦船的各個域中去。船舶域控制器對域內組件有更加詳細的了解,為了實施需要的預定義行為,域控制器將為下一層級軟件組件生成更加詳細和精確的后續指令。在船舶控制中這些指令被工程控制系統完整接收,并被進一步分解成I/O(模擬量,開關量和串行的)監控活動,這些監控活動遍布在工程控制系統控制下的船體機電系統中。當ECS指令是從船舶域控制器接收時,工程控制系統工作為自動模式,當這些指令來自人機界面時,工程控制系統工作為遠程手動控制模式。在工程控制系統下面的設備層有多個響應工程控制系統發出的命令含有嵌入式控制器的系統。設備層的復雜性和能力有所不同,但在有些情況下非常復雜(例如,發電機負載分配、燃氣輪機控制、設備和系統的自我保護和安全功能等)。
從指揮、控制和情報系統發出的信息以任務的形式被執行多種功能的船舶域控制器接收。船舶域控制器的功能包括指定可能發生沖突或者不能同時執行的任務的優先權和分解上一層級的艦船活動。船舶域控制器能提供特殊的系統狀態限制和/或異常,能提供預期的船體機電系統的需求和/或負荷的指示,這些指示是成功執行艦船任務所必需的。圖2顯示了指令和狀態活動的界面。
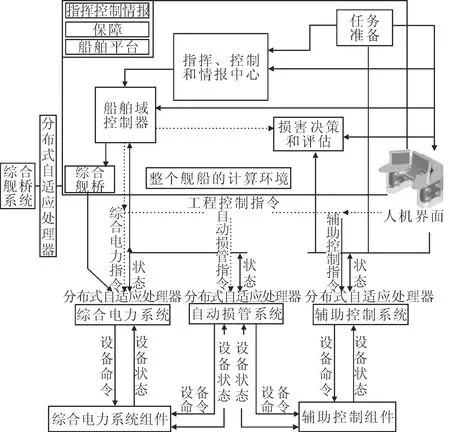
圖2 DDG-1000的控制分層
2.3 全船計算環境
DDG-1000通過一個全船計算環境減少集成工作并獲得跨越多個域的通用模式優勢。全船計算環境有三個層級:核心層(core)、適應層(adaptation)和描述層(presentation)。
核心層提供了一個通用的環境來承載DDG-1000的大多數在冗余架構上的軟件應用,該冗余架構的目標硬件對應用是透明的。核心層處理器是運行著Red Hat Linux操作系統的IBM平板服務器,被封裝在電子模塊中分布在船上的各個位置。
描述層是全船計算環境中負責在控制臺上執行顯示的那部分。
適應層利用更加緊湊的硬件來提供一種手段把軟件集成到全船計算環境中,但處理器可以位于任何合適的位置。
工程控制系統的適應層采用在Versa歐卡模塊(VME)機架上安裝的,稱為組合控制器(EC)的,成對搭配使用的Radstone單板機(SBC)和通用的微型系統單板機。Radstone單板機上運行Lynx操作系統(LynxOS)即UNIX,并且使用Java和/或C++代碼編寫的應用軟件,被稱為分布式自適應處理器(DAP)。這些應用軟件用于實現與其它應用(運行在全船計算環境架構上)的控制和接口。工程控制系統控制器對中的通用微型系統單板機中運行具有實時內核微軟視窗和西門子Simatic WinAC RTX PLC應用軟件,通過梯形邏輯來控制和驅動被稱為遠程終端單元(RTU)的遠程I/O機架,RTU是連接到工程設備的接口。工程控制系統在其體系內利用了32個適應層處理器,使得軟件集合緊密地靠近他們所控制的系統[3-4]。
2.4 工程控制系統分布式軟件和功能
工程控制系統應用程序駐留在分布于全船各處的16個分布式控制單元(DCU)中。16個DCU中有32個組合控制器,工程控制系統控制代碼駐留在組合控制器中。組合控制器使用分布式自適應處理器通過全船計算環境千兆局域網絡與其他應用連接,并具有在全船計算環境核心層中獨立運行其它應用程序的附加功能(手動模式下直接連接到人機界面)。工程控制系統和人機界面的內核獨立運行提供了在降級運行中的系統恢復能力,降級運行有可能是擴展電源中斷或者設備損害造成的。
在EC上的第2種控制器——通用微系統單板機中運行的西門子Simatic WinAC RTX PLC軟件通過Profinet協議(Profibus&Profinet以太網國際標準)與其它的DCU以及RTU進行通訊。共有180個RTU安裝在非常靠近他們所連接硬件的偏僻的位置。DCU和RTU使用艦上廣泛應用的Profinet網絡(被稱為工程控制系統網絡)穿越防火區連接起來,實現DCU到DCU、DCU到RTU的通訊,進而實現主備處理器的故障切換、監控工程設備和系統。圖3展示了工程控制系統的分布式特性。
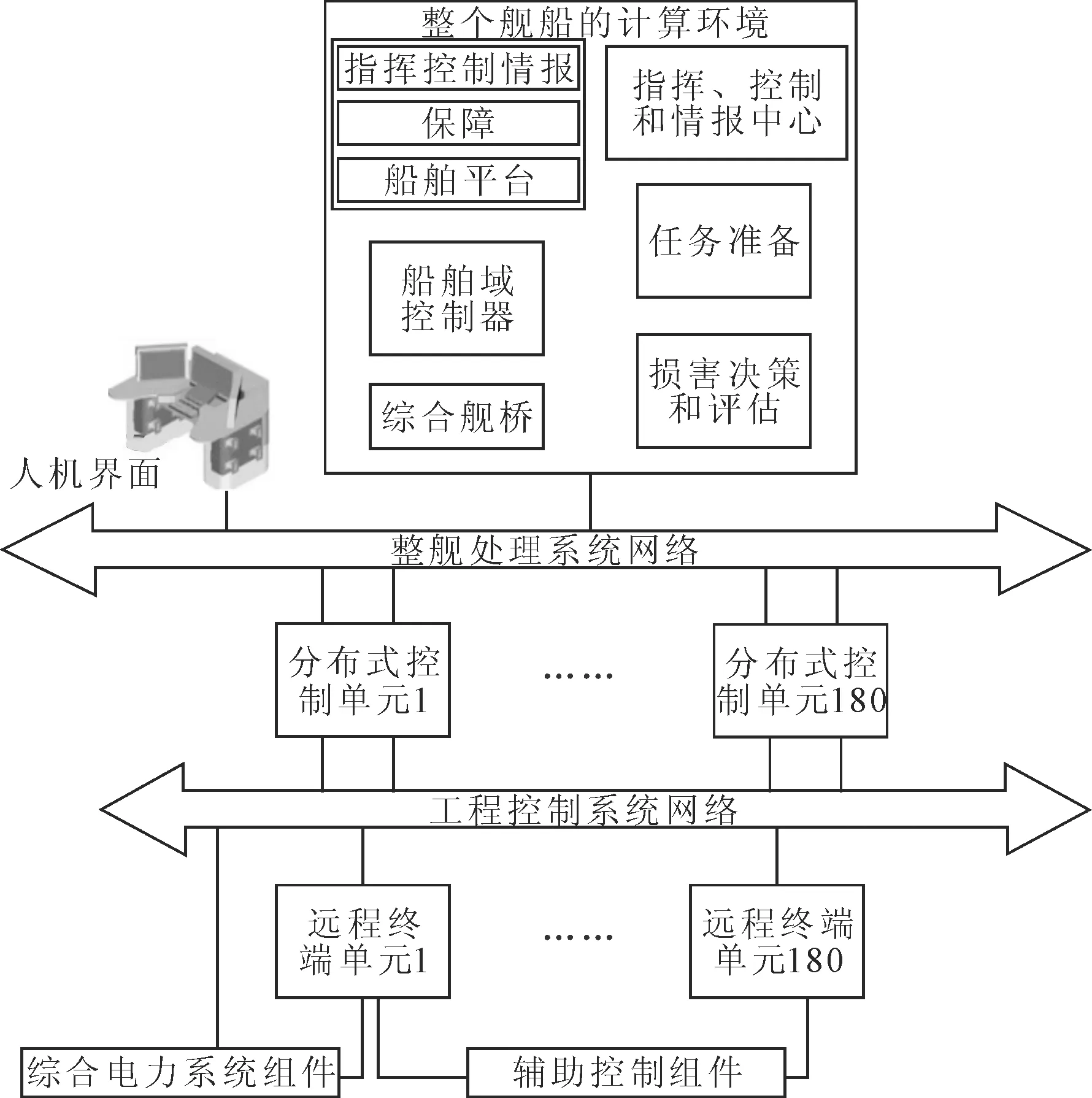
圖3 DDG-1000分布式機械控制
DDG-1000的工程設備包括大多數海軍已經嘗試設計和建造的自動化系統和設備。大多數設備和系統的自動化采用有數字端口的嵌入式控制,這些數字端口使用通用網絡和現場總線協議。有超過80 000個信號可以用于監控,然而經過嚴格的系統工程處理后確定,在這些信號中,工程控制系統只需要使用大約30 000個。相比之下,目前服役的海軍艦艇上的機械控制系統大多數使用4 000~10 000個信號。這30 000個信號是實現DDG-1000所要到達的人員配備水平所必需的。
DDG-1000的需求規定:在初始化系統隊列之后,在機械層不需要手動介入的所有船級任務的正常操作期間,工程控制系統自動化的層級可實現單個操作員即可協調全部工程設備。但在設備發生故障或損壞期間,預設至少有一個其他的操作者將參與關鍵系統的控制,并且系統控制權的轉移是工程控制系統的一種固有功能。如果能有效地通過一個設備遠程監控端口,工程控制系統可以為個別設備的部件或傳感器提供“向下挖掘”(drill-down)能力。該能力允許操作者根據需要觀察底層數據作為備用信息。操作者同樣有能力進行遠程控制和直接發送指令給工程控制系統(見圖2的HCI接口);這同樣支持維修觀念,如果認為有必要,操作者有能力停止自動化功能。對于操作者來說所有數據都是可以利用的,并且可以將它們提供給其它應用,例如能夠自動識別和安排維修操作的基于狀態的檢修(CBM)。綜合電力系統控制集合駐留在位于靠近前主發電機艙和船尾發電機艙安裝的4個分布式自適應處理器(2個處于活動狀態,2個冗余備用的處理器)中。工程控制系統的大多數設備和子系統與綜合電力系統的接口都使用全船計算環境網絡架構的虛擬局域網絡(VLAN),綜合電力系統控制集合使用的虛擬局域網絡通信協議有Ethernet Global Data(EGD),MODBUS TCP和OpenSea。
工程控制系統的綜合電力系統控制集合除了監測電站設備,還要執行電源管理。這些活動被船舶域控制器分解并作為指令提供給工程控制系統。電源管理是集合了高低壓電力系統功能的通用名稱,高低壓電力系統包含電力推進電動機、電力分配設備和支持艦船活動的負載。綜合電力系統控制集合協調系統隊列順序,執行設備的啟動和停止,排序并管理系統恢復操作,并基于這些指令以一種自動化方式來執行系統重新配置。綜合電力系統控制集合通過計算一個區域內的可利用和消耗的電量來管理設備供電。這個區域由系統隊列命名的“電力中心”確定,綜合電力系統控制集合的“電力計算”特點被用于進一步確定有多少負載獲得了電源(發電機和/或電源轉換器/逆變器)供電,被用于按照優先權連接和斷開負載,根據需要增加發電量,并且被用于與船上其它工程控制系統集合和域外通信來協調電力的使用。
輔助控制集合(MACS)駐留在16個分布式自適應處理器(8個處于活動狀態、8個冗余備用的處理器)中,這些分布式自適應處理器位于輔助設備所在區域附近的若干位置。輔助系統包括冷卻水、燃料油、淡水生產和排水等。輔助控制集合除了監測輔助設備外,還執行系統管理。盡管沒有動力設備管理那樣復雜,輔助控制集合同樣協調系統隊列順序,執行設備的啟動和停止,排序并管理系統活動,并基于指令以一種自動化方式來執行系統重新配置,這些指令來自綜合電力系統控制集合和自動損管集合。
自動損管集合駐留于12個分布式自適應處理器中(6個處于活動狀態、6個冗余備用的處理器),這些分布式自適應處理器位于損管設備所在區域附近的若干位置。損管系統包括海水供水(用于壓艙和排水)、水成膜泡沫(AFFF)、高壓水霧等。在大多數情況下,自動損管集合監測已經現場激活的損管設備,但是在某些情況下,自動損管集合也提供遠程控制功能。自動損管集合與輔助控制集合一起協調系統隊列順序,執行設備的啟動和停止,排序并管理系統活動,以自動化方式來執行系統重新配置必需有輔助系統支撐的損管系統的支持。
2.5 嵌入式控制
在設備層,在一些子系統中有多套操作特殊設備的嵌入式控制器。例如,高壓配電板有與發電機接口的控制器。這些控制器順序執行步驟,設置發電機在線和離線,平衡有功和無功負載,當發電機并聯運行時,平衡有功和無功負載,并可以為電源管理提供所需的信息。
嵌入式子系統控制器的其他例子包括用于主消防泵和閥的可邏輯編程控制器(PLC)、應急柴油發電機和補給系統的PLC控制等。
3 硬件
3.1 硬件組成
工程控制系統是一個實時的分布式控制系統,可以自動監控DDG-1000的工程設備。工程控制系統利用網絡DCU和與船上船體機電設備連接的RTU來監控傳感器、執行器、接觸器和電力設備等。工程控制系統是全船計算環境硬件和商業技術的結合,除了滿足嚴格的環境要求的外殼設計外,商業成熟的產品(COTS)和器件未經修改地用在了工程控制系統的硬件里;船舶控制系統的生存能力需求要求控制系統完全冗余,對于艦船能力的控制狀態、艦員的健康和安全要具有強大容錯能力;DCU作為主要的處理組件,它是與船舶主TSCE-I網絡的連接接口。控制和運行船舶軟件集合,并使用閉環控制、預定義順序和其它控制算法監控推進、輔助、電氣和損管系統。RTU是嵌入式控制器、各種模擬和數字輸入/輸出的接口點。
每個DCU包含兩對在Versa歐卡模塊(VME)機架上安裝的Radstone和通用微型統單板機。Radstone單板機在Lynx操作系統(LynxOS)上運行的應用程序,通過兩條每秒1 000 bit/s的光纖以太網與艦船主TSCE相連。正如前面提到的,這對處理器被稱作組合控制器。分布式自適應處理器運行應用程序代碼并利用全船計算環境架構為DDG-1000開發的一些功能,如傳輸機制,數據庫特性等。基于單板機的通用微型統(GMS)視窗執行西門子Simatic WinAC RTX PLC應用軟件。PLC應用軟件含有第三方的實時內核,能提供艦船系統的監控,掃描時間可配置。分布式自適應處理器通過直接接口給PLC處理器軟件傳送命令,艦船設備和裝置的狀態通過同一接口從PLC軟件傳送給分布式自適應處理器。
兩個組合控制器中軟件集合的每個實例都提供冗余配置,一個運行在激活狀態,另一個處在備用狀態。激活和備用對在物理上分屬于一個防火區內不同的DCU,增加了存活能力。激活和備用PLC軟件通過Profinet網絡相互監視,當激活的單元失效或探測到一個故障時,能夠自動切換。
3.2 DCU布置和工程控制系統網絡
16個使用西門子Profinet架構的DCU分布在整條軍艦上。在艦上4個防火區中的每一個都有4個DCU(見圖4),DCU1和DCU 2在在防火區1中,DCU3和DCU 4在防火區2中,依此類推。每個DCU包含了3個Siemens Scalence X408-2交換機。X408-2提供了1 000 Mbit/s光纖“管理環”網絡把所有DCU連接到一起的端口,見圖4。X408-2交換機同樣提供了與PLC軟件連接的網絡接口。
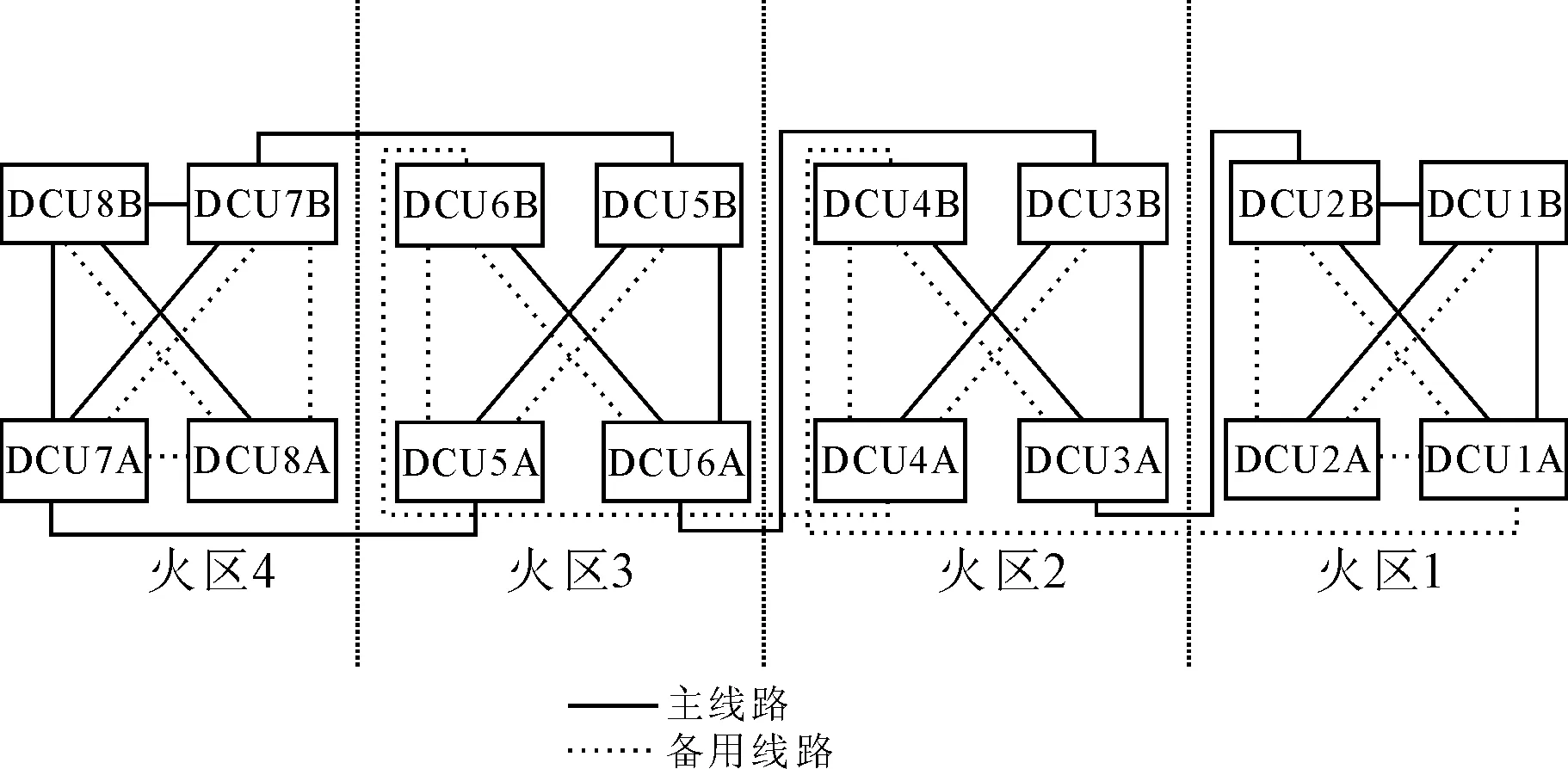
圖4 DDG-1000的DCU的內部鏈接
每個DCU在物理上使用X408-2交換機與其它3個或4個DCU連接,并提供與Siemens Scalence X202-2IRT交換機相連的網絡接口,這些X202-2IRT交換機用來連接冗余的100 Mbit/s的RTU光纖網絡(見圖5)。DCU和RTU網絡的組合稱為工程控制系統網絡。
在工程控制系統網絡里使用的西門子交換機允許配置對等的網絡切換,這可以提供網絡的高可用性和大量的診斷選項,提供高傳輸速率,支持光線和銅介質傳輸。工程控制系統網絡包含幾個由激活和備用的通信鏈路組成的“管理環”以太網網絡界面(用于確保避免有激活的以太網環)。在圖5中,激活的鏈路用實線表示,備用的鏈路用虛線表示。管理環方法保持環的一部分被指定為不活動和無響應,當激活的環上發生任意錯誤或者故障時,可以在300 ms內自動地激活這部分(停用另一條邊)。
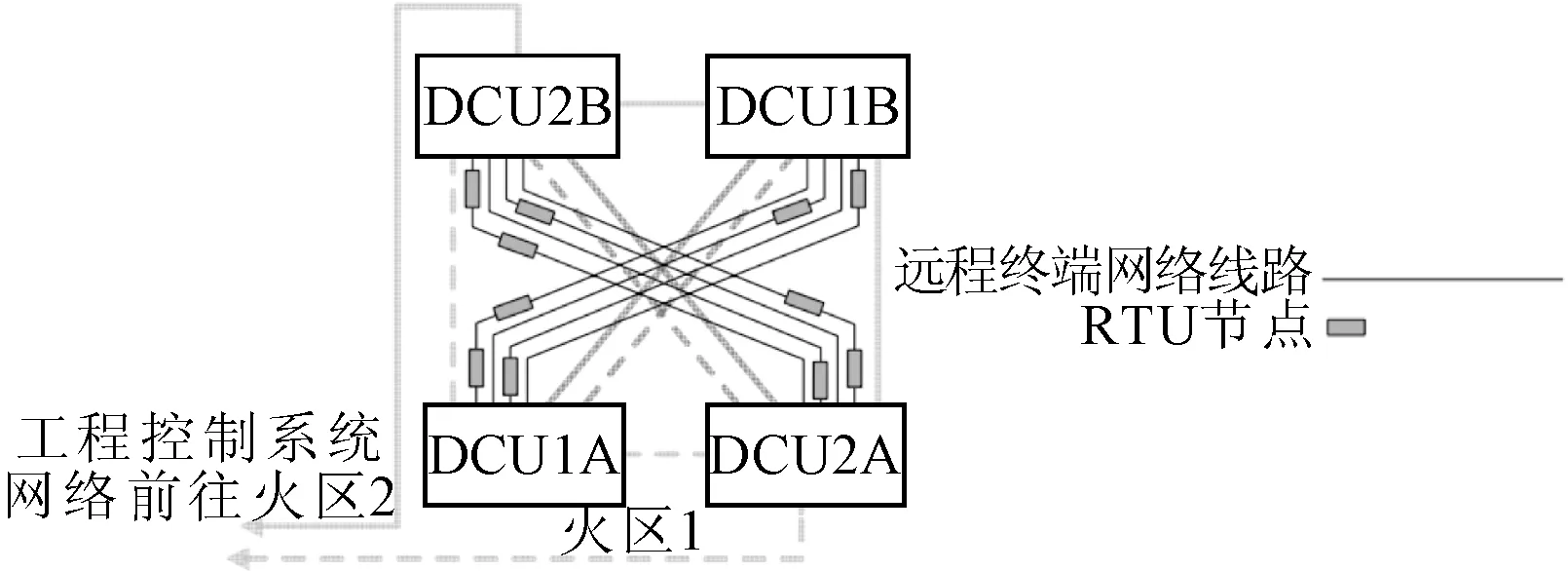
圖5 DDG-1000的RTU的內部鏈接
有180個RTU分布在全艦各處。每個RTU都通過標準的數字和模擬模塊以及串行現場總線/通信網關連接到船體機電設備。RTU包括商業成熟的西門子網絡交換機,接口模塊和PLC功能,I/O模塊和接線端子。RTU包含一個單獨的西門子Scalence X204-2網絡交換機用來與工程控制系統中DCU組合的PLC軟件部分進行通訊。X204-2有4個RJ45網絡端口和兩個光纖端口。兩個光纖端口通過100 M bps RTU網絡與DCU的通訊。DCU和RTU的通信是建立在Profinet CBA協議的基礎上。Profinet CBA是由通過TCP/IP基于組件的通信和與組件的實時通信組成的。Profinet CBA使整個自動化系統分成自主運行的子系統,通過子系統對接口數據的分組使網絡上任意應用都可以使用這些數據。由于Profinet CBA的限制,每個控制器只能有64個Profinet CBA連接點。這造成了了8個軟件集合體連接到任意一個RTU的限制。
3.3 與工程設備相連的RTU接口
在RTU里的西門子CPU接口模塊、IM151-8、片式I/O和串行網關提供船船體機電系統和DCU PLC軟件集合體之間的監控。IM151-8接口模塊發送并接收來自片式I/O和串行網關的數據,為DCU PLC軟件集合提供I/O狀態信息來協調船體機電設備的監視和閉環控制。IM151-8包含故障切換的梯形邏輯代碼,用于收集并輸出數據給一個DCU集合或者它的備用DCU。模塊的模擬和數字I/O和串行網關與IM151-8通訊,并與靠近RTU的艦船系統裝備連接。RTU傳輸數據給全艦上適當的DCU和它們的組合。每個RTU中的IM151-8接口模塊都有獨特的梯形邏輯代碼。這由Siemens Step 7開發軟件編程。在RTU中的軟件代碼包含用來初始化I/O模塊和串行網關的配置數據。RTU包含通用的片式I/O模塊和幾種不同類型的用于與船體機電設備連接和通訊的串行網關。網關模塊連接的設備包括網絡傳感器、獨立的智能組件和系統/設備的本地控制器。
3.4 區域現場總線
串行網關使用有限的幾種現場總線協議與船體機電設備連接。這些現場總線統稱為區域現場總線(ZFB)。為了最大限度地降低成本,改善配置管理和生命周期支持,在DDG-1000上有幾種不同類型的現場總線協議:Profibus DP(over copper),工業以太網協議(EthernetIP),ControlNet,Modbus和LonWorks。經過大量的商業研究,這些現場總線被確定為在工業領域內最常用的現場總線,并能滿足船體機電設備的需求。DDG-1000項目的未來依賴于一個開放的架構、設備和標準商業成熟的硬件未來的穩定性,使得整個項目在它的生命周期內能夠保持當前的狀態,同時通過使用工業自動化架構來降低成本。因為這些現場總線的類型在細節設計之前已經被選用了,所以船舶設計師以及他們的供應商能夠使用這些標準現場總線之一來設計或調整他們原有的設備[5]。
4 結束語
美國海軍21世紀新型多任務驅逐艦DDG-1000是第一個包含海軍最先進工程控制系統的平臺,艦船系統設計的自動化和復雜化程度達到了空前的水平,超過了其它所有已經為海軍水面艦艇開發的機械控制系統。
[1] 谷榮亮,馬紅霞.美軍新型驅逐艦DDG-1000未被大批量采購的原因分析[J].國防科技,2012,273(2):14-16.
[2] 郭遠星,施一明,葉瑩.艦船綜合控制系統研究與設計[J].中國造船,2010,51(3):192-194.
[3] 董曉明,石朝明,黃 坤,等.美海軍DDG-1000全艦計算環境體系結構探析[J].中國艦船研究,2012,7(6):9-11.
[4] DESAI D M,BRADICICH T M,CHAMPION D,et al. Blade center system overview [J]. IBM Journal of Research and Development,2005,49(6):809-821.
[5] 劉國平.船舶電氣與通信[M].北京:海洋出版社,2004.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
中國特種設備安全(2022年6期)2022-09-20 02:52:28
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
電子制作(2018年11期)2018-08-04 03:26:08
太空探索(2016年6期)2016-07-10 12:09:06
工業設計(2016年12期)2016-04-16 02:52:00
筑路機械與施工機械化(2015年11期)2015-07-01 16:28:43
筑路機械與施工機械化(2015年8期)2015-01-11 09:24:54
消費者報道(2014年7期)2014-07-31 11:23:57
