新型旋流沉砂池砂粒去除效果的數(shù)值模擬
2012-12-24 11:24:56邵超葉勇汪家權(quán)張輝王淦侯紅勛王晶
環(huán)境工程技術(shù)學(xué)報 2012年5期
關(guān)鍵詞:模型
邵超,葉勇,汪家權(quán)* ,張輝,王淦,侯紅勛,王晶
1.合肥工業(yè)大學(xué)資源與環(huán)境工程學(xué)院,安徽 合肥 230009
2.安徽國禎環(huán)保節(jié)能科技股份有限公司,安徽 合肥 230088
沉砂池作為污水處理中必不可少的預(yù)處理設(shè)施,主要是去除含砂廢水中一定直徑的砂粒,減少砂粒對機(jī)械設(shè)備造成的過度磨損,以保證后續(xù)處理單元能夠正常運行[1-2]。常用的沉砂池有平流式沉砂池、曝氣沉砂池、旋流沉砂池等[3]。近年來,旋流沉砂池得到越來越多的應(yīng)用,主要由于該類沉砂池具有占地省、除砂效率高、操作環(huán)境好、設(shè)備運行可靠等優(yōu)點[2,4-6]。目前具有代表性的旋流沉砂池主要是美國Smith&Loveless公司開發(fā)的比氏(Pista)沉砂池和英國Jones&Attwood公司開發(fā)的鐘式(Jeta)沉砂池[3]。
目前針對旋流沉砂池的數(shù)值模擬國內(nèi)鮮有研究,Wang等[7]利用Star-CD商業(yè)軟件對某污水處理廠的旋流沉砂池進(jìn)行數(shù)值模擬,得到了相應(yīng)的流場分布及不同砂粒運行軌跡,并采用實際的砂粒粒徑計算出相應(yīng)的砂粒去除率;欒闖[8]采用Eulerian-Eulerian模型和Eulerian-Lagrangian模型模擬分析了瀑布溝旋流沉砂池原有工況下的流場情況和砂石顆粒分布,并由不同轉(zhuǎn)速和不同槳葉位置的數(shù)值模擬結(jié)果得出最佳工況的槳葉轉(zhuǎn)速為105 r/min,槳葉位置為 592 mm;李濤[9]采用 Eulerian-Eulerian模型和Eulerian-Lagrangian模型模擬分析了旋流沉砂池內(nèi)攪拌槳葉片數(shù)量、葉片角度和水力停留時間(HRT)對砂石顆粒去除效果的影響,認(rèn)為當(dāng)葉片數(shù)量為4片,葉片角度為45°,HRT為90 s時旋流沉砂池的效果最佳。
筆者從流場和顆粒運動等方面對旋流沉砂池的機(jī)理、攪拌槳運動以及進(jìn)水流速變化對砂粒去除效果的影響進(jìn)行研究,以期為旋流沉砂池的設(shè)計和改進(jìn)提供理論參考。
1 攪拌器
根據(jù)攪拌器的運動方向與槳葉表面的角度可以將攪拌槳葉形狀分為平葉、折葉和螺旋面葉[10]三類。實驗采用的攪拌槳葉是折葉型,折葉由于槳面與運動方向成一定傾斜角(θ),所以在槳葉運動時,除有水平環(huán)流外,還有軸向分流,在槳葉轉(zhuǎn)速增大時,還有逐漸增大的徑向流。根據(jù)槳葉排液方向?qū)⒌湫偷臉~分成徑流型和軸流型(圖1),折葉槳居于二者之間[10-11]。其中徑流型攪拌器在一定轉(zhuǎn)速下旋轉(zhuǎn)時,自槳葉處排出高速流體,該高速流體同時吸引挾帶著周圍的液體,使周圍的靜止流或低速流卷入到高速流中,徑流型攪拌器漿葉產(chǎn)生一種“蝴蝶”型流態(tài),攪拌槳從池頂部和底部吸引挾帶物質(zhì),沿著攪拌槳兩側(cè)徑向排出;軸流型攪拌器自槳葉排出的高速流是軸向的,其對周圍的低速流同樣具有吸引挾帶作用,但不同于徑流型的流態(tài),軸流型是從頂部吸引挾帶物質(zhì),然后從池底部排出[10-11]。

圖1 徑流型與軸流型攪拌器Fig.1 Runoff-type and axial-type agitator
2 計算模型的建立
2.1 數(shù)學(xué)模型
2.1.1 湍流模型
由于旋流沉砂池的流場大多由旋流態(tài)占主導(dǎo),周國忠等[12]對攪拌槽內(nèi)三維流動場數(shù)值模擬的研究表明,相對于標(biāo)準(zhǔn)k-ε模型,RNG k-ε湍流模型在耗散率方程中通過系數(shù)C1*引入描述流場畸變效應(yīng)的附加源項后,在一定程度上改善了對槳葉附近各向異性湍流的預(yù)報能力,對速度場的預(yù)報比k-ε模型更加準(zhǔn)確。因此,可以采用RNG k-ε湍流模型,該模型可以更好地處理高應(yīng)變率及流線彎曲程度較大的流動,主要針對充分發(fā)展的湍流流動,即高Re數(shù)的湍流計算模型[13-14];而對于近壁區(qū)的流動采用壁面加強(qiáng)函數(shù)法求解。具體的k和ε方程如下[14-16]:

2.1.2 離散相模型與顆粒尺寸分布
實驗使用的離散相顆粒為砂粒,假設(shè)顆粒為均勻球體,其體積分?jǐn)?shù)小于12%,因此采用離散相模型(DPM),可以忽略顆粒與顆粒間的相互作用、顆粒體積分?jǐn)?shù)對連續(xù)相的影響[17]。假設(shè)離散相在流場中的質(zhì)量及動量載荷率很低,在該情況下,連續(xù)相流場基本不受離散相的影響,可以忽略顆粒相對連續(xù)相的影響[18]。
在CFD中通過積分拉氏坐標(biāo)系下的顆粒作用力微分方程求解離散相顆粒的軌道[17]。顆粒的作用力微分方程在笛卡爾坐標(biāo)系下的形式(x方向)為:


對顆粒尺寸進(jìn)行 Rosin-Rammler分布擬合[17,19],其中 Rosin-Rammler分布函數(shù)通常寫成:

式中,Y為小于直徑 D的顆粒的質(zhì)量分?jǐn)?shù);ˉd為Rosin-Rammler直徑;n為Rosin-Rammler指數(shù)。
2.2 幾何模型
實驗?zāi)P椭饕蛇M(jìn)水口、沉砂池池體、出水口、集砂斗和攪拌槳等組成,如圖2所示。其中攪拌槳的旋轉(zhuǎn)方向為順時針。

圖2 新型旋流沉砂池和攪拌槳示意Fig.2 Schematic diagram of the new rotational flow grit chamber and the agitator
2.3 邊界條件與網(wǎng)格劃分
在不影響求解計算結(jié)果的條件下,對旋流沉砂池小試模型進(jìn)行簡化,忽略池體的壁厚,只考慮與流動區(qū)域直接接觸的內(nèi)部區(qū)域。采用三維模型,對旋流沉砂池小試模型進(jìn)行建模和網(wǎng)格劃分,設(shè)置邊壁和攪拌槳葉片為固體壁面,固體壁面上采用無滑移邊界條件,即u=v=w=0,近壁流動區(qū)采用壁面函數(shù)法處理。假定系統(tǒng)處于穩(wěn)態(tài)過程,攪拌過程采用多重參考系模型(MRF),砂粒的運動過程采用離散相模型(DPM)。
網(wǎng)格分為結(jié)構(gòu)網(wǎng)格和非結(jié)構(gòu)網(wǎng)格兩大類[13]。在旋流沉砂池中,由于模型結(jié)構(gòu)比較復(fù)雜,對其進(jìn)行三維流場數(shù)值計算,網(wǎng)格質(zhì)量的優(yōu)劣直接影響到計算精度和收斂性。因此,對于旋流沉砂池模型的網(wǎng)格劃分采用分塊處理[18],如圖3所示。

圖3 沉砂池模型網(wǎng)格劃分示意Fig.3 Schematic diagram of grit chamber model meshing
3 流場模擬
3.1 壓力場與速度場
3.1.1 壓力場
沉砂池內(nèi)的壓強(qiáng)分布如圖4所示。由圖4可以看出,在旋流沉砂池底部附近,壓強(qiáng)由池壁向池心遞減(池壁附近的壓強(qiáng)明顯大于池體中部的壓強(qiáng)):砂粒在由入口進(jìn)入池體內(nèi)運動的過程中,壓強(qiáng)逐漸降低(在池壁與攪拌槳之間的區(qū)域),如圖4紅色方框區(qū)域所示,該處的壓強(qiáng)變化較為明顯,這種壓強(qiáng)差促使砂粒不斷向池中心附近移動;另外,在攪拌槳處壓強(qiáng)較大,而在池心靠近砂斗口附近壓強(qiáng)處于較低值,該區(qū)域所形成的壓強(qiáng)差可以進(jìn)一步使聚集在水平池底的砂粒(靠近攪拌槳附近)向池心運動,并落入砂斗中。

圖4 攪拌槳傾角60°下壓強(qiáng)分布Fig.4 Under impeller angle 60°pressure distribution
從砂粒運行軌跡(圖5)看,砂粒主要在紅色圓框區(qū)域附近向池心移動,并落入砂斗內(nèi)。從壓強(qiáng)角度看,砂粒在沉砂池內(nèi)的運動及沉降主要依賴于壓強(qiáng)變化,且某區(qū)域壓強(qiáng)差越大,砂粒的運動越明顯。

圖5 砂粒運行軌跡Fig.5 The trajectories of sand
3.1.2 速度場
折葉攪拌槳在旋轉(zhuǎn)的過程中自槳葉排出的高速流是軸向的,且對周圍的低速流具有吸引挾帶的作用[10],由此在池體內(nèi)形成軸向環(huán)流流態(tài),沉砂池內(nèi)部速度矢量如圖6所示。

圖6 沉砂池內(nèi)部速度矢量Fig.6 The velocity vector in the grit chamber
圖6(a)為沉砂池內(nèi)部水平截面速度矢量,液面形成水平環(huán)流流場,有助于池體內(nèi)的砂粒在離心力的作用下向池壁附近移動;圖6(b)為沉砂池內(nèi)部垂直截面速度矢量,在攪拌槳附近存在明顯的軸向流流場,該流場不僅有助于砂粒較快沉降于池底,而且也使得水平池底的砂粒在該流場作用下向池心移動并落入砂斗內(nèi)。因此,在水平環(huán)流和垂直環(huán)流的共同作用下,水流在沉砂池中以螺旋狀前進(jìn),砂粒則在該流場的作用下,不斷向池心匯集并落入砂斗內(nèi)[5-6]。
3.2 攪拌槳靜止和非靜止(一定的進(jìn)水流速)時池體內(nèi)流場變化
當(dāng)z=0.065 mm時,攪拌槳靜止和非靜止時的壓強(qiáng)分布如圖7所示。由圖7可以看出,攪拌槳在非靜止時的最大壓強(qiáng)明顯大于靜止時,且最大壓強(qiáng)的分布區(qū)域也不同,靜止時處于入流口附近,而非靜止時處于攪拌槳附近,這說明攪拌槳的運動會改變池體內(nèi)壓強(qiáng)值,并對池體內(nèi)的壓強(qiáng)分布產(chǎn)生一定的影響;但靜止與非靜止兩種情況在入流口附近的壓強(qiáng)相似,并沒有因攪拌槳的運動而發(fā)生較大差異。另外,從圖7的紅色方框區(qū)域可以看出,靜止時在池體中部尤其是攪拌槳附近有很大區(qū)域壓強(qiáng)值處于最低值且不存在壓強(qiáng)變化,這使得砂粒易于在該處堆積;而非靜止時,壓強(qiáng)在由池壁到池心存在明顯的變化,形成的壓強(qiáng)差將有助于砂粒沉降與去除。

圖7 攪拌槳靜止和非靜止時壓強(qiáng)分布Fig.7 Pressure distribution in the stationary and non-geostationary mixing paddle
在攪拌槳靜止時,一定的進(jìn)水流速也會在池體內(nèi)形成環(huán)流流態(tài)(主要取決進(jìn)水渠結(jié)構(gòu)及進(jìn)出水的設(shè)計方式);攪拌槳在靜止和非靜止時垂直截面產(chǎn)生水平環(huán)流和軸向環(huán)流流態(tài)如圖8所示。
3.3 攪拌槳旋轉(zhuǎn)方向的變化對砂粒運動的影響
3.3.1 逆時針
攪拌槳逆時針旋轉(zhuǎn)的垂直截面速度矢量與砂粒運行軌跡如圖9所示。由圖9(a)可知,當(dāng)攪拌槳逆時針運動時,軸向環(huán)流呈逆時針流態(tài),這將不利于砂粒的沉降與去除:一方面池壁附近的砂粒在沉降過程中將受到一定的阻礙作用;另一方面攪拌槳附近的流場不利于砂粒向池心移動。因此,在攪拌槳逆時針旋轉(zhuǎn)時,大多數(shù)砂粒可能始終懸浮于池體內(nèi),而最終會隨水流帶走。


通過向模型中注入砂粒,基于液相流場的數(shù)值模擬結(jié)果,采用離散相模型對砂粒的運動進(jìn)行計算,結(jié)果顯示〔圖9(b)〕,在沉砂池砂斗中砂粒量很少,反而在池體內(nèi)及出口處存在較多的砂粒,其與垂直截面速度矢量圖的分析相符,說明當(dāng)攪拌槳逆時針旋轉(zhuǎn)時,沉砂池內(nèi)的流場不利于砂粒的沉降與去除;同時也說明攪拌槳轉(zhuǎn)速對沉砂池中砂粒的去除有著一定的作用。
3.3.2 順時針
攪拌槳順時針旋轉(zhuǎn)的垂直截面速度矢量與砂粒運行軌跡如圖10所示。

圖10 攪拌槳順時針旋轉(zhuǎn)的垂直截面速度矢量與砂粒運行軌跡Fig.10 The cross-section velocity vector of the impeller clockwise rotation and the trajectories of sand
當(dāng)攪拌槳順時針旋轉(zhuǎn)時,由圖10(b)可知,水流夾帶著砂粒沿著沉砂池底部周邊進(jìn)入池體內(nèi),在強(qiáng)制渦旋的作用下,一部分砂粒在水平環(huán)流與軸向環(huán)流的作用下,在砂斗中被捕集;而部分尺寸較小的砂粒則重新返回到水流中,在池體內(nèi)經(jīng)過若干個螺旋循環(huán)運動后,隨水流由出口帶走;結(jié)合圖10(a)可知,與攪拌槳逆時針運動所產(chǎn)生的結(jié)果相比,順時針旋轉(zhuǎn)形成的軸向環(huán)流是順時針流態(tài),因此,當(dāng)攪拌槳順時針旋轉(zhuǎn)時,池體內(nèi)所形成的環(huán)流流態(tài)有助于砂粒的沉降與去除,且符合旋流沉砂池的運行特性。
4 結(jié)果與分析
4.1 攪拌槳運動與進(jìn)水流速的關(guān)系
4.1.1 攪拌槳靜止時進(jìn)水流速變化對砂粒去除效果的影響
當(dāng)攪拌槳靜止時,進(jìn)水流速(0.09,0.12,0.18和0.36 m/s)對砂粒去除的影響如圖11所示。

圖11 攪拌槳靜止時進(jìn)水流速對砂粒去除的影響Fig.11 Different water flow rate on the impact of sand removal efficiency for the stationary mixing paddle
由圖11可知,在不同進(jìn)水流速下,池體含砂率均較高,砂粒的去除率均較低,主要是由于進(jìn)水水流所產(chǎn)生的軸向環(huán)流雖然可以使大多數(shù)砂粒沉降于池底,但進(jìn)水流速所產(chǎn)生的軸向環(huán)流強(qiáng)度及影響范圍有限,因此,砂粒的運動將受到限制,也進(jìn)一步說明了攪拌槳轉(zhuǎn)速對砂粒運動的重要性。
另外,由圖11還可以看出,在進(jìn)水流速較小時,池體含砂率較高,逃逸率較低;而在進(jìn)水流速逐漸增大時,池體含砂率逐漸減少,逃逸率相應(yīng)地增加。這是由于水流夾帶著砂粒在沉砂池內(nèi)以螺旋狀前進(jìn),當(dāng)進(jìn)水流速增大時,水流進(jìn)入到池體的射流強(qiáng)度將增大,所形成的渦旋強(qiáng)度也將隨之增強(qiáng),加之砂粒的運行路徑也會明顯縮短,使得部分砂粒來不及沉降而隨水流由出口帶走;當(dāng)進(jìn)水流速較小時,大部分砂粒雖然存在于池體內(nèi),但由于進(jìn)水水流強(qiáng)度較弱,所形成的軸向環(huán)流強(qiáng)度并不能使得多數(shù)砂粒向池心移動。因此,進(jìn)水流速過大或過小都不利于砂粒的沉降。
4.1.2 進(jìn)水流速一定的條件下,攪拌槳轉(zhuǎn)速變化對砂粒去除效果的影響
在進(jìn)水流速為0.18 m/s的情況下,不同攪拌槳轉(zhuǎn)速(13,20,26,30,40 和60 r/min)對砂粒去除效果的影響如圖12所示。
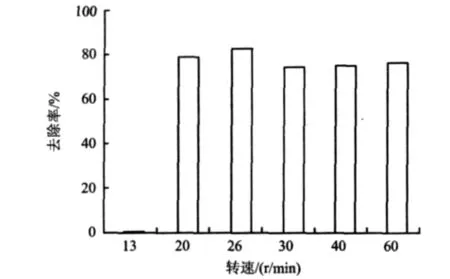
圖12 進(jìn)水流速一定時轉(zhuǎn)速對砂粒去除率的影響Fig.12 Different influent velocity on the impact of sand removal efficiency for the constant flow rate
由圖12可知,當(dāng)進(jìn)水流速為0.18 m/s時,砂粒去除率在攪拌槳轉(zhuǎn)速為26 r/min達(dá)到最佳,而低于或高于該值砂粒去除率均降低。由離散相模型中砂粒的運動軌跡可知,在轉(zhuǎn)速低于26 r/min時,砂粒的逃逸率與26 r/min時相近,但池體含砂率有著明顯的差別,砂粒主要集中于池底位置(靠近攪拌槳附近),這是因為砂粒向池心運動時,需要足夠的力使砂粒移動,而僅依靠進(jìn)水水流的作用,以及攪拌槳低轉(zhuǎn)速的運動,不能達(dá)到有效去除砂粒,因為攪拌槳在低轉(zhuǎn)速條件下,所產(chǎn)生的渦旋強(qiáng)度相對較小,使得攪拌槳附近大多數(shù)砂粒無法向池心移動;而當(dāng)轉(zhuǎn)速高于26 r/min時,砂粒的逃逸率降低,因為當(dāng)轉(zhuǎn)速增加時,攪拌槳周圍也會形成逐漸增大的徑向流[10],其不利于池壁附近砂粒向池心的移動;同時池底內(nèi)一部分砂粒在移向池心時,也會因較強(qiáng)的渦旋流,使部分砂粒重新回到水流中。
5 結(jié)論
(1)旋流沉砂池砂粒的去除,主要是基于強(qiáng)制渦旋流。在壓力場方面,壓強(qiáng)差將影響砂粒的運動;在速度場方面,池體內(nèi)主要存在水平環(huán)流和軸向環(huán)流兩種流態(tài)。
(2)當(dāng)攪拌槳旋轉(zhuǎn)運動方向不同時,沉砂池內(nèi)所形成的軸向環(huán)流流場存在較大差異。當(dāng)攪拌槳順時針旋轉(zhuǎn)時,產(chǎn)生的軸向環(huán)流流場符合沉砂池的運行特性,軸向流速有利于砂粒的沉降和池底附著砂粒向池心的移動;而當(dāng)攪拌槳逆時針旋轉(zhuǎn)時,產(chǎn)生的流場不利于砂粒沉降與去除。
(3)當(dāng)攪拌槳靜止時,進(jìn)水流速過大或過小都不利于砂粒的沉降。進(jìn)水流速過小,池體內(nèi)會累積較多的砂粒;而進(jìn)水流速過大,砂粒的逃逸率也隨之增大。
(4)在進(jìn)水流速一定時,攪拌槳轉(zhuǎn)速的變化對砂粒的去除也有一定的影響。當(dāng)轉(zhuǎn)速較小時,產(chǎn)生的渦旋強(qiáng)度不足以將砂粒移向池心,因此砂粒去除率較小;而當(dāng)轉(zhuǎn)速逐漸增大時,形成的徑向流和較強(qiáng)的軸向流不利于砂粒的沉降與去除。
[1]鄒啟賢,張金松,曲志軍.沉砂池類型及其應(yīng)用[J].西南給排水,2005,27(4):8-11.
[2]李濤.沉砂池的設(shè)計及不同池型的選擇[J].中國給水排水,2001,17(9):37-42.
[3]高廷耀,顧國維,周琪.水污染控制工程[M].3版.北京:高等教育出版社,2006.
[4]邵林廣.圓形渦流式沉砂池除砂效率的探討[J].給水排水,1998,24(12):38-40.
[5]譚小鋌.國外兩種圓形沉砂池的討論[J].給水排水,1998,23(9):23-26.
[6]王雪原.Pista360°渦流沉砂池的特色與設(shè)計要點[J].中國給水排水,2001,17(8):36-38.
[7]WANG X L,ZHOU S S.The numerical computation of grit chamber with rotational flow[C]//Bioinformatics and Biomedical Engneering(iCBBE),2010 4th International Coference.Pascataway:IEEE Press,2010.
[8]欒闖.基于CFD的水電工程砂石廢水旋流沉沙池的優(yōu)化設(shè)計[D].天津:天津大學(xué),2009.
[9]李濤.處理砂石廢水的旋流沉砂池內(nèi)高濃度固液兩相流數(shù)值模擬[D].天津:天津大學(xué),2010.
[10]陳乙崇.攪拌設(shè)備設(shè)計[M].上海:上海科學(xué)技術(shù)出版社,1990.
[11]端木強(qiáng).容器設(shè)計中攪拌裝置的軸向力分析[J].天津化工,2003,17(1):50-52.
[12]周國忠,王英琛,施力田.攪拌槽內(nèi)三維流動場的RNG k-ε數(shù)值模擬[J].北京化工大學(xué)學(xué)報,2002,29(2):15-19.
[13]王福軍.計算流體動力學(xué)分析:CFD軟件原理與分析[M].北京:清華大學(xué)出版社,2007.
[14]ANIL W D.Introduction to computational fluid dynamics[M].New York:Cambridge University Press,2005.
[15]VERSTEEG H K,MALALASEKERA W.An introduction to computational fluid dynamics:the finite volume method[M].New York:John Wiley Sons Inc,1995.
[16]ANDERSON J D.Computational fluid dynamics:the basics with applications[M].New York:McGraw Hill,1995.
[17]Fluent Inc.Fluent 6.3 user’s guide[M].Harrisonburg:Fluent Inc,2006.
[18]于勇.Fluent入門與進(jìn)階教程[M].北京:北京理工大學(xué)出版社,2008.
[19]葉瑞.新型旋流沉砂池砂粒去除效果的數(shù)值模擬[D].合肥:合肥工業(yè)大學(xué),2009.○
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19