采用Emotiv 感知的智能輪椅運動控制的研究
2012-12-14 01:36:22胡豁生
重慶郵電大學學報(自然科學版) 2012年3期
張 毅,張 輝,羅 元,胡豁生
(重慶郵電大學國家信息無障礙工程研發(fā)中心智能系統(tǒng)及機器人研究所,重慶400065)
0 引言
隨著社會老齡化進程的加快以及由于各種疾病、工傷、交通事故等原因造成下肢損傷的人數(shù)的增加,為老年人和殘疾人提供性能優(yōu)越的代步工具已成為整個社會重點關(guān)注的問題之一[1]。其中,作為代步工具的一種,智能輪椅受到了世界各國研究者的廣泛關(guān)注。
智能輪椅作為一種服務(wù)機器人,除了具有自主導航、避障等多種功能之外,還融合了人機交互技術(shù)的多種控制方式,如語音、手勢、肌電信號、腕部運動、頭部運動和腦電信號等。其中,基于腦電信號的腦機接口技術(shù)近年來受到高度關(guān)注。
腦機接口(brain computer interface,BCI)是一種新的人機交互方式,它是基于腦電信號實現(xiàn)人腦與計算機或其他電子設(shè)備的通訊和控制[2]。BCI相比于肌電、語音、腕部運動、手勢等人機交互方式,有其先天的優(yōu)勢。BCI不依賴于人體的外周神經(jīng)系統(tǒng)及肌肉組織,僅根據(jù)大腦思維意念或感官反映所產(chǎn)生的腦電信號進行工作。因此BCI技術(shù)應(yīng)用范圍更廣,并且在助老助殘的智能輪椅中有著廣闊的應(yīng)用前景。但是由于腦電信號十分微弱并且存在較強的干擾,使得腦電信號的采集和處理都困難,從而導致使用腦電信號進行控制難度較大。除此之外,由于人的個體差異,導致使用腦電信號控制的效果并不理想,從而影響控制的穩(wěn)定性。
基于上述狀況,本文采用Emotiv傳感器設(shè)計了一種基于運動想象的控制系統(tǒng)。該系統(tǒng)可以通過想象左右手、邁腿動作與平靜狀態(tài)來實現(xiàn)對智能輪椅的實時控制。實驗結(jié)果表明該控制系統(tǒng)可行,并且具有較好的穩(wěn)定性。
1 系統(tǒng)框架
本系統(tǒng)主要包括腦電信號采集、放大、濾波、去噪、特征提取與特征分類以及控制實現(xiàn)和仿真訓練等部分。其中,腦電信號的采集、放大和濾波通過Emotiv傳感器完成。Emotiv傳感器采集得到的腦電信號經(jīng)過去噪、特征提取與特征分類,最終設(shè)計出控制指令并通過無線網(wǎng)絡(luò)將控制指令傳送給智能輪椅,以達到控制輪椅運動的目的。除此之外,本系統(tǒng)還采用虛擬物體運動形式仿真上述控制指令,用來讓受試者進行訓練。該控制系統(tǒng)的框架圖如圖1所示。
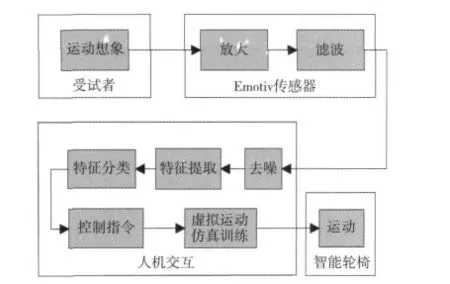
圖1 控制系統(tǒng)框架圖Fig.1 Framework of the control system
2 系統(tǒng)設(shè)計
2.1 腦電信號獲取
本系統(tǒng)采用的腦電信號采集設(shè)備是Emotiv System公司開發(fā)的Emotiv傳感器,其主要部件的外觀如圖2a所示。Emotiv傳感器以P3/P4為參考電極,上面安裝著14個電極,可以采集到14個通道的腦電信號,并進行放大與濾波,然后通過無線技術(shù)傳回計算機[3]。Emotiv傳感器的電極安放位置采用國際10-20導聯(lián)制,如圖2b所示。
2.2 腦電信號去噪
傳感器采集的腦電信號雖然經(jīng)過了放大和濾波等處理,但是還會伴有各種生理干擾,如眼電、心電和肌電等偽跡。為了降低偽跡對腦電信號分析的影響,我們要對腦電信號進行去噪。腦電信號去噪的方法有多種,本文采用獨立分量分析(independent component analysis,ICA)算法對腦電信號進行去噪。

圖2 Emotiv外觀及電極安放位置Fig.2 Appearance and electrode placement of Emotiv
ICA算法是近年來由盲信源分離技術(shù)發(fā)展起來的一項多導信號處理方法[4-5]。其基本含義是將多道觀察信號按照統(tǒng)計獨立的原則通過優(yōu)化算法分解為若干獨立分量,從而實現(xiàn)信號的增強和分析。因為采集到的腦電信號是自發(fā)腦電信號與各種偽跡的線性混合,滿足信號源獨立的條件,所以ICA算法適用于分離腦電中的偽跡。
ICA 可描述為:設(shè) x(t)=[x1(t),x2(t),…,xN(t)]T是N個腦電頭皮電極陣列測得的N維觀測信號,s(t)=[s1(t),s2(t),…,sN(t)]T是產(chǎn)生觀測信號的N個相互統(tǒng)計獨立的源信號,且觀測信號x(t)是源信號s(t)經(jīng)過線性混合矩陣A而產(chǎn)生的,如(1)式所示

ICA所要解決的問題是在混合矩陣A以及源信號s(t)均未知的情況下,以分離結(jié)果相互獨立為前提,尋找一個優(yōu)化解混矩陣W,使得變換后的輸出能很好地逼近源信號s(t)。

對于腦電信號去噪,我們需要找到優(yōu)化解混矩陣W,使得去噪后的信號y(t)更好地逼近純凈的腦電信號s(t)。去噪步驟如下:
1)對腦電信號進行獨立分量分析,得到各個獨立分量;
2)將偽跡的獨立分量置零,其他獨立分量保持不變;
3)利用得到的解混矩陣W的逆矩陣W-1還原腦電信號,得到不含偽跡的腦電信號。
2.3 特征提取與分類
腦電信號是腦內(nèi)眾多神經(jīng)元活動產(chǎn)生的突觸后電位的同步振蕩產(chǎn)生的生理電活動。由頭皮上記錄到的腦電信號是大腦皮層及皮層下大量神經(jīng)元或神經(jīng)網(wǎng)絡(luò)的同步活動的反映。當大腦受到感官刺激、動作指令和想象運動等電信號刺激時,皮層神經(jīng)元之間的聯(lián)系結(jié)構(gòu)發(fā)生改變,使它們的同步性被抑制或增強,從而產(chǎn)生事件相關(guān)去同步(event-related desynchronization,ERD)和事件相關(guān)同步(event related synchronization,ERS)。
研究表明:當人想象左手運動時,管理左側(cè)人體活動的右側(cè)大腦便開始興奮,腦部神經(jīng)活動變化較劇烈,平靜態(tài)時各種同步活動被打破,表現(xiàn)為測量到的相關(guān)電極腦電信號幅度下降。當人想象右手運動時,以上表現(xiàn)反之。當想象邁腿運動時,管理人體下肢活動的大腦中央部分便開始興奮,腦部神經(jīng)活動變化較劇烈,平靜態(tài)時各種同步活動被打破,表現(xiàn)為測量到的相關(guān)電極腦電信號幅度下降[6-7]。
根據(jù)文獻[7],我們可以知道當人在進行運動想象時,大腦兩側(cè)相關(guān)電極附近會產(chǎn)生ERD和ERS現(xiàn)象,從而導致不同想象運動誘發(fā)的事件相關(guān)電位在大腦皮層的空間分布也不相同。因此本文選取大腦兩側(cè)的F3,F(xiàn)4,F(xiàn)C5和FC6電極進行研究,并將其采集的腦電信號組成 x(t)=[xF3,xF4,xFC5,xFC6]T,然后對其進行ICA算法處理,得到4×4維的解混矩陣W。由于解混矩陣的逆矩陣W-1可以反映誘發(fā)的事件相關(guān)電位在大腦皮層的空間分布,所以我們將W-1的列向量提取出來作為運動想象的特征向量進行分類。由(2)式可得
本文采用BP(back propagation)神經(jīng)網(wǎng)絡(luò)對提取的特征向量進行分類[8],分類器如圖3所示。由(3)式可以得到W-1有4個列向量,所以神經(jīng)網(wǎng)絡(luò)輸入層設(shè)為4個神經(jīng)元。神經(jīng)網(wǎng)絡(luò)輸出層設(shè)為2個神經(jīng)元,可以分類出想象左手、右手運動、邁腿運動和平靜狀態(tài)。對于隱層神經(jīng)元數(shù)量目前還沒有好的方法進行計算,我們憑借經(jīng)驗根據(jù)分類的正確率選取5個神經(jīng)元。
2.4 控制實現(xiàn)
經(jīng)過特征分類后,Emotiv的應(yīng)用程序編程接口將分類結(jié)果:想象左右手、邁腿動作與平靜狀態(tài)生成4個運動事件,即 COG_LEFT,COG_RIGHT,COG_LIFT和COG_NEUTRAL。我們利用Visual Studio進行編程,用上述的4個運動事件分別設(shè)定4個運動控制指令:左轉(zhuǎn)、右轉(zhuǎn)、前進和停止。然后將控制指令傳送給智能輪椅,實現(xiàn)運動控制。最后用虛擬物體的運動[9]形式仿真上述4個運動指令,用來進行訓練,從而讓受試者更熟練的掌握運動控制。虛擬運動仿真界面如圖4所示。運動想象、智能輪椅和虛擬物體仿真之間的詳細關(guān)系見表1。
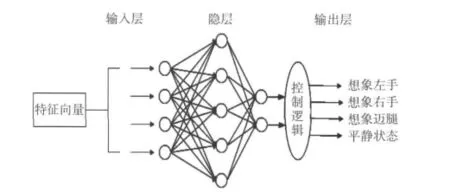
圖3 BP神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)Fig.3 BP neural network structure
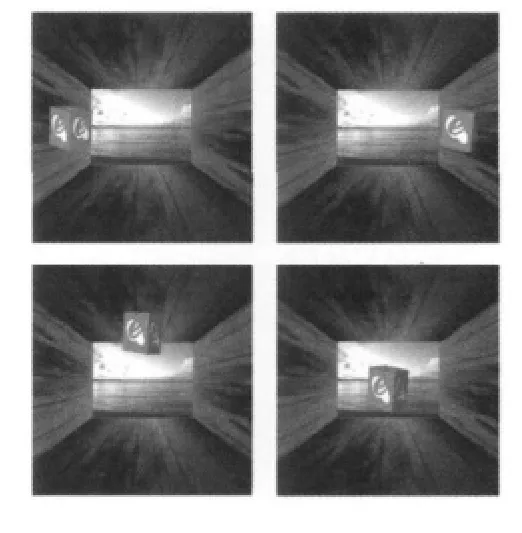
圖4 虛擬運動仿真界面Fig.4 Virtual movement simulation interface
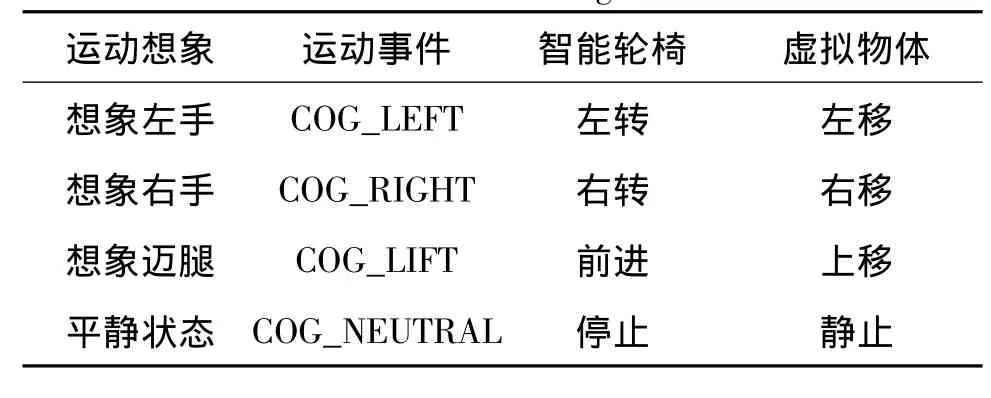
表1 運動想象、智能輪椅和虛擬運動的關(guān)系Tab.1 Relationship of motor imagery,virtual movement and intelligent wheelchair
對于表1中所示的對應(yīng)關(guān)系,在此做一些說明:運動想象和智能輪椅運動的對應(yīng)關(guān)系并不是必然的。以想象左手為例,并不是每一次想象左手運動都能使智能輪椅左轉(zhuǎn)。反之,智能輪椅左轉(zhuǎn)并不一定是由于想象左手運動所致。這種現(xiàn)象與腦電信號的特征提取、分類及模式識別的準確性有著密切的聯(lián)系。因為準確性不可能達到百分之百,所以這種現(xiàn)象是無法避免的。我們只能通過完善算法、提高系統(tǒng)性能來彌補這種不足。
3 實驗及分析
為了驗證該控制系統(tǒng)的可行性和穩(wěn)定性,我們需要選取受試者在智能輪椅上進行軌跡重復性實驗。
在此之前,我們選取5名受試者并且使用虛擬物體運動仿真界面對設(shè)定的4個控制指令進行訓練,使得受試者熟悉用想象運動來控制指令。訓練時間為5天,每天訓練90 min。訓練完畢后,測試受試者的控制指令識別率,得到4個控制指令的平均識別率,如表2所示。
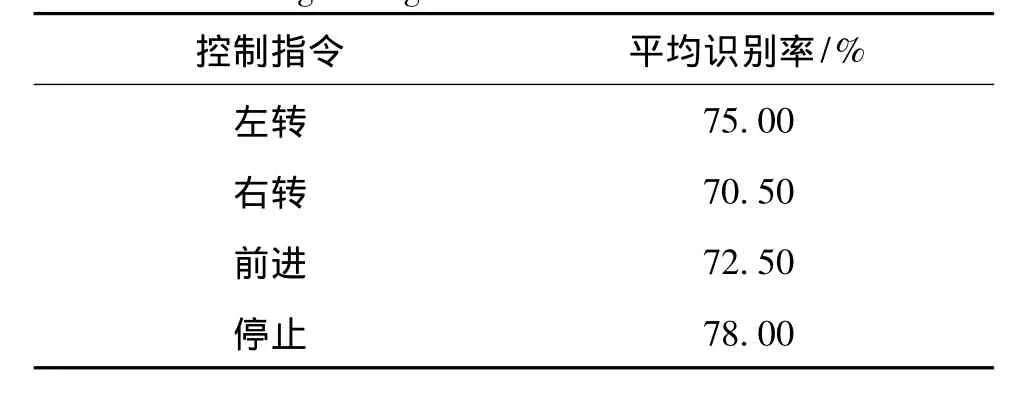
表2 控制指令的平均識別率Tab.2 Average recognition rate of the control commands
本文設(shè)計的實驗路線如圖5所示,軌跡實驗要求受試者通過運動想象控制智能輪椅從A點開始運動,繞過2個長方體的障礙物到達B點。由于受試者對指令控制存在著誤差,所以輪椅不一定能順利地準確到達B點。因此本實驗只要求受試者控制輪椅到達B點附近區(qū)域即可。
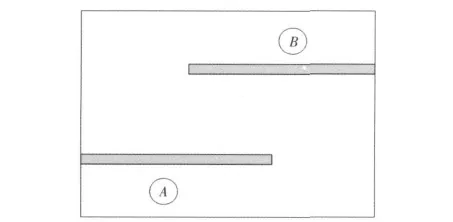
圖5 實驗路線圖Fig.5 Experimental roadmap
實驗開始,我們要求訓練好的5名受試者分別進行5次軌跡重復性實驗。實驗過程中,記錄每次實驗所用的時間。實驗完畢,從每名受試者的5次軌跡實驗中選出所用時間最短的一個,并將其繪制成圖。然后,從軌跡圖中選出所用時間最短和所用時間最長的軌跡,如圖6所示。圖6中a為所用時間最短的軌跡圖,b為所用時間最長的軌跡圖,帶箭頭的平滑曲線為理想軌跡路線。圖中x為實驗軌跡坐標橫軸,y為實驗軌跡坐標縱軸,單位為毫米。

圖6 實驗軌跡圖Fig.6 Experimental trajectories
從圖6中可以看到,雖然受試者訓練的時間相同,但是由于個體差異等原因而導致受試者對智能輪椅控制情況不同,具體表現(xiàn)為b軌跡比a軌跡的路線長。雖然如此,但是a和b兩個軌跡相差并不是很大,并且都較穩(wěn)定的完成了從A點到B點的運動。除此之外,由表2可以看到4個運動控制指令的識別率都達到了70%以上。因此本文設(shè)計的腦電信號控制智能輪椅可行,并且具有較好的穩(wěn)定性。
此外,我們還看到兩組軌跡偏離理想運動路線的程度。由于腦電信號不容易控制,所以想要走出理想運動路線是不可能的。造成這種現(xiàn)象的原因有以下3個:
1)控制指令存在著識別錯誤;
2)受試者對控制指令間切換掌握的不夠熟練;
3)系統(tǒng)有一定的延遲性。
下一步我們將通過優(yōu)化算法提高控制指令識別率,并通過訓練解決指令間的切換熟練程度問題。最終降低系統(tǒng)的延遲性,進一步完善系統(tǒng)的性能。
4 結(jié)束語
本文采用Emotiv傳感器感知腦電信號設(shè)計了一種智能輪椅控制系統(tǒng)。這個系統(tǒng)可以通過想象左右手和腳的運動實時控制智能輪椅。通過軌跡重復性實驗,證明了該控制系統(tǒng)具有較好可行性和穩(wěn)定性,為腦電信號控制在智能輪椅中的實際應(yīng)用奠定了基礎(chǔ)。我們將會在以后的改進中充分考慮和解決系統(tǒng)暴露出來的問題,進一步完善系統(tǒng)的性能。
[1]魯濤,原魁,朱海兵.智能輪椅研究現(xiàn)狀及發(fā)展趨勢[J].機器人技術(shù)與應(yīng)用,2008,2(2):1-5.LU Tao,YUAN Kui,ZHU Hai-bin.Research status and development trend of intelligent wheelchair[J].Robot Technology and Application,2008,2(2):1-5.
[2]WOLPAW J R,MCFARLAND D J,NEAT G W.An EEG-based brain computer interface for cursor control[J].Electroenceph Clin Neurophysiol,1991,78(3):252-259.
[3]EMOTIV.Emotiv SDK User Manual[EB/OL].[2011-11-29].http://www.emotiv.com.
[4]周宗潭,董國華,徐昕.獨立成分分析[M].北京:電子工業(yè)出版社,2007:2-8.ZHOU Zong-tan,DONG Guo-hua,XU Xi.Inde-pendent component analysis[M].Beijing:Electronics Industry Press,2007:2-8.
[5]楊福生,洪波.獨立分量分析的原理與應(yīng)用[M].北京:清華大學出版社,2006:1-5.YANG Fu-sheng,HONG Bo.Principles and app-lications of independent component analysis[M].Beijing:Tsinghua University Press,2006:1-5.
[6]白雪.腦電波實時控制電動輪椅[J].機器人技術(shù)與應(yīng)用,2010,2(3):10-12.BAI Xue.Brain wave real-time control of electric wheelchair[J].Robot Technology and Application,2010,2(3):10-12.
[7]王攀,沈繼忠,施錦河.想象左右手運動的腦電特征提取[J].傳感技術(shù)學報,2010,23(9):1220-1225.WANG Pan,SHEN Ji-zhong,SHI Jin-he.Feature extraction of EEG for imagery left-right hands movement[J].Chinese Journal of Sensors and Actuators,2010,23(9):1220-1225.
[8]胡人君,李坤,吳小培.腦機接口應(yīng)用中的思維任務(wù)分類[J].計算機工程與應(yīng)用,2007,43(3):201-203.HU Ren-jun,LI Kun,WU Xiao-pei.Mental task classification for brain computer interface applic-ation [J].Computer Engineering and Application,2007,43(3):201-203.
[9]FRANCESCO Carrino,JULIEN Tscherrig.Head-computer interface:a multimodal approach to navigate through real and virtual worlds[C]//International Conference on Human-Computer Interaction.Florida:Springer Press,2011:222-230.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
科普童話·學霸日記(2021年4期)2021-09-05 04:28:51
小學生作文(低年級適用)(2019年12期)2020-01-18 07:50:36
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國化妝品(2018年6期)2018-07-09 03:12:42