人在回路中的末制導系統性能測試與評估*
2012-12-10 02:23:24何亞娟符新軍
彈箭與制導學報 2012年2期
關鍵詞:系統
何亞娟,王 蕭,符新軍
(中國兵器工業第203研究所,西安 710065)
0 引言
對遠程紅外圖像制導導彈來說,導引頭能否及時識別目標并對其進行快速穩定跟蹤,如何評估末制導系統的性能優劣是深入開展圖像制導技術研究的重要方面。圖像制導導彈的特點之一就是人在回路中,因此,人在回路中的制導系統設計與性能評估就成為一個必須研究解決的問題。在制導系統設計中,較為復雜的是“人”這個環節的模型建立,而建立人的數學模型是一項復雜而艱巨的工作任務,涉及多種專業和學科,需要做大量的理論研究和試驗、統計工作。在現代導彈制導系統設計過程中,虛擬樣機已經成為一種普遍應用的輔助設計手段。基于以上情況,如能在虛擬樣機基礎上構建存在人的作用輸入的實時試驗系統,將為制導系統的設計與性能評估帶來諸多好處,并在研制費用和周期上得到很大程度上的縮減。
1 末制導性能評估試驗系統
1.1 末制導性能評估試驗系統總體方案
分別建立導引頭成像系統模塊和導引頭穩定與跟蹤系統模塊的細粒度虛擬樣機[1],導引頭成像系統虛擬樣機包括目標/背景紅外輻射模型、大氣輻射與衰減模型、傳感器模型;集成成像系統和穩定與跟蹤系統兩個模塊,構成完整的圖像導引頭系統虛擬樣機[2];紅外圖像導引頭虛擬樣機與導彈動力學運動學模塊、導彈控制系統模塊、目標運動模塊、圖像跟蹤器試驗樣機及操控裝置試驗樣機,構成完整的人在回路的末制導性能評估實驗系統[3],系統組成原理如圖1所示,系統構成與連接關系如圖2所示。
圖像末制導性能評估試驗系統各模塊功能與系統工作原理:導彈動力學與運動學模塊實時計算導彈的位置與姿態[4],將導彈的姿態信息發送到導引頭穩定與跟蹤系統模塊;導引頭穩定與跟蹤系統模塊根據操控裝置、圖像跟蹤器傳來的指令,綜合導彈的姿態信息,計算出導引頭姿態;導引頭成像系統虛擬樣機接收導彈位置信息、導引頭姿態信息和目標運動模塊的目標位置姿態信息,生成導引頭當前的輸出圖像;導引頭成像系統虛擬樣機輸出圖像到圖像跟蹤器/監視器;圖像跟蹤器計算跟蹤指令并輸出到導引頭的穩定與跟蹤系統模塊;射手根據監視器上的圖像,利用操控裝置和圖像跟蹤器對目標進行手動或自動跟蹤;控制系統模塊接收導引頭穩定與跟蹤模塊的制導信號,按照設計的制導律,計算控制指令,控制導彈飛行。

圖1 末制導性能評估試驗系統工作原理
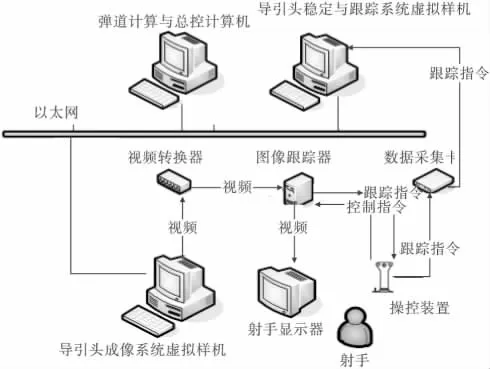
圖2 人在回路末制導性能評估試驗系統構成與連接關系
1.2 末制導性能評估試驗系統建立
構建該試驗系統的主要工作內容包括:導引頭成像系統虛擬樣機建模與驗模;導引頭穩定與跟蹤系統虛擬樣機建模與驗模;彈道計算與控制系統模型軟件實現;虛擬樣機、彈道計算機(包括彈道計算與控制模型)與操控裝置和圖像跟蹤器實體樣機的集成。其中,高擬真度成像系統虛擬樣機和導引頭穩定與跟蹤系統虛擬樣機的建模與驗模、大氣輻射傳輸模型的應用以及試驗系統集成為關鍵技術。
要以該試驗最大限度地代替飛行試驗,前提是試驗結果必須正確。試驗結果的可信性首先取決于描述實際物理系統動態過程的數學模型的擬真度,其次取決于所構建的試驗系統和實際工作環境的逼真度。制導系統基于數學模型的虛擬樣機能否真實反映其工作特性,即擬真度是否滿足要求,需要尋找合理的內外場試驗方法,確定擬真度評價指標,對其進行校驗,使數學模型在最大程度上反映其代表的物理部件的性能特性。
2 基于性能評估試驗系統的人在回路中的末制導系統性能測試試驗
2.1 復雜背景下的目標搜索與識別
導彈在飛行過程中,射手需要通過觀看導引頭攝取的圖像從背景中檢索出要攻擊的目標,目標識別過程如圖3所示,圖中的每一個環節和目標在視場中停留的時間都會影響識別結果[5]。在導引頭瞬時視場和識別距離受限的情況下,為了增大目標識別概率,通常采用導引頭按指定規律掃描的方法,以增大視場或延長目標在視場中的停留時間。
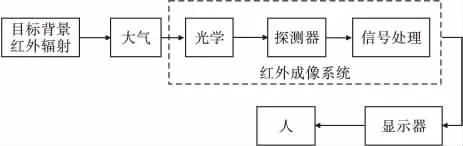
圖3 目標電光成像與識別過程
針對背景項目的作戰使命和作戰使用環境設置試驗條件和試驗目標,通過觀察導引頭虛擬視景做識別試驗,統計在不同作戰環境條件下,采用不同導引頭參數、掃描規律和彈道參數時,對不同目標在規定識別距離內的識別概率以及平均識別距離。為背景項目總體方案和導引頭方案確定提供參考。
2.2 手動和自動跟蹤實驗與末制導系統性能評估
在射手識別目標后,需要通過操縱手柄使導引頭光軸指向目標,隨后可選擇轉入自動跟蹤方式由圖像跟蹤器產生跟蹤指令使光軸指向目標。利用性能評估試驗系統通過試驗測試的方法評估導彈在不同速度、不同導引率、不同數據鏈路延遲情況下對不同運動速度和運動規律目標的手動與自動跟蹤性能。手動與自動跟蹤目標試驗現場如圖4所示。
2.2.1 手動跟蹤試驗
對初步設計的制導與控制系統進行手動跟蹤試驗,通過射手的實際觀察評測導彈對目標的跟蹤性能。不同的導引頭跟蹤回路參數和大回路參數引起的視線誤差角、過載和彈體姿態角如圖5、圖6、圖7所示。
由圖5可以看出,射手能夠快速地使視線誤差角減小,但不能將目標穩定在視場中心,視線角誤差震蕩,經分析是由于導引頭跟蹤回路增益過大,通過減小導引頭跟蹤回路增益、降低導引頭回路帶寬來解決導引頭的穩定問題。

圖4 手動與自動目標跟蹤試驗

圖5 導引回路增益過大時的視線誤差角與過載

圖6 大回路增益過大時的視線誤差角、彈體姿態角和過載
由圖6可以看出,在導彈轉入比例導引之前,射手能夠穩定跟蹤目標,轉比之后,彈體控制不穩定導致導引頭不能穩定跟蹤目標,以致脫靶。經分析是由于大回路增益過大引起的,應該通過減小大回路增益解決此問題。
造成脫靶量較大的原因在于視線誤差角較早的超過導引頭半視場。而此時的橫向過載并未超過可用過載,應該通過調整導引頭參數和跟蹤大回路參數的方法優化導引頭和彈體的響應。導引頭跟蹤回路與大回路綜合調整后的手動跟蹤曲線見圖7。
2.2.2 針對大機動目標的手動與自動跟蹤對比試驗
在圖像跟蹤器能夠穩定的跟蹤大機動目標的情況下,進行相同條件下的手動跟蹤實驗,發現自動跟蹤回路參數不適用于手動跟蹤。相同的跟蹤回路參數條件下手動與自動跟蹤大機動目標對比試驗曲線如圖8所示。

圖7 參數綜合調整后的視線誤差角、彈體姿態角和過載

圖8 相同跟蹤回路參數時的手動與自動跟蹤大機動目標
由此可見,自動跟蹤回路與手動跟蹤回路必須分別設計。對手動跟蹤回路進行了重新調整,調整后,手動可穩定的跟蹤蛇形機動目標,調整前后手動跟蹤曲線對比如圖9所示。
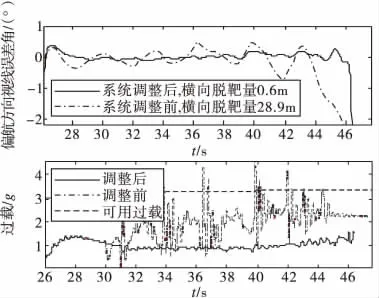
圖9 手動跟蹤回路調整前后的試驗曲線對比
3 結論
由于人的不確定性和非線性,在制導系統設計時,對人的特性必須進行充分的試驗和分析。利用虛擬樣機技術建立末制導性能評估試驗系統,將人的作用以與實際系統相同的方式引入制導回路,通過人在回路中的閉環試驗,使得末制導系統的性能評估結果更具有可信性,制導與控制系統的設計更符合實際。利用該試驗系統進行試驗,對不同設計參數條件下的目標識別與跟蹤性能進行直觀高效的評估與驗證,并有針對性的及時改進系統設計,優化參數,具有其它試驗不可比擬的方便性和經濟性。為研究圖像制導導彈的目標搜索、識別、跟蹤和人在回路中的行為特性以及與制導系統參數的匹配性等關鍵技術問題提供了一個有效途徑。
[1]費錦東,劉鵬.凝視紅外成像末制導系統應用研究[J].紅外與激光工程,2006,35(3):253-257.
[2]陳澄,石靜.凝視紅外成像制導系統數學建模與仿真技術[J].紅外與激光工程,2007,36(1):18-22.
[3]費錦東,梁波,魏宇飛,等.凝視紅外成像末制導系統性能測試評估方法[J].紅外與激光工程,2007,36(5):589-592.
[4]錢杏芳,林瑞熊,趙亞男.導彈飛行力學[M].北京:北京理工大學學出版社,2000.
[5]付宏明.紅外成像末制導系統指標評價方法[J].紅外與激光工程,2008,37(4):796- 797.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32