地面驅動螺桿泵采油系統抽油桿等效節點載荷分析
2012-12-05 02:41:48王尤富
石油礦場機械 2012年5期
關鍵詞:螺桿泵
熊 希,王尤富
(長江大學 石油工程學院,湖北 荊州 434023)①
地面驅動螺桿泵采油系統中,抽油桿連接地面驅動裝置和井下螺桿泵。系統在工作時,抽油桿將電機的動力傳遞給螺桿泵,還與油管柱內壁發生碰撞,直接影響到抽油桿柱的運動和受力狀態[1-5]。判斷抽油桿是否與油管發生碰撞,需要計算抽油桿各處的位移,考慮到井斜因素的影響,本文采用有限元的方法對問題進行求解。
1 抽油桿有限元分析模型
假設初始條件為:①抽油桿軸線與油管的軸線重合;②抽油桿柱在啟動時不與油管壁發生接觸。
整個抽油桿柱可以看作為1條空間曲線,將其劃分成n個相連的又不互相重疊的梁單元,并以其中1個單元為研究對象。任一空間梁單元i、j節點位移、節點力分析如圖1所示。
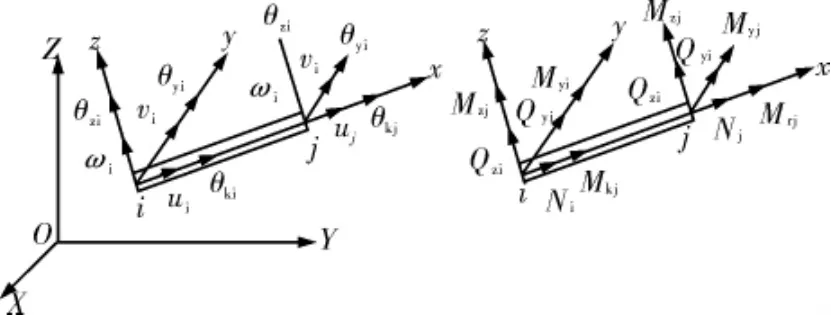
圖1 單元節點位移和節點力分析
引入2個坐標系,其中OXYZ是固定坐標系,oxyz是單元局部坐標系[6]。設單元廣義節點位移向量為

單元節點速度向量為

單元廣義節點力向量為

根據哈密頓原理和拉格朗日方程,可得到單元的運動方程[7]為

式中,Te為抽油桿單元動能;Ve為抽油桿單元勢能;Re為抽油桿單元的能量耗散。
經過進一步整理,得出單元有限元方程為

將單元的各個矩陣進行裝配,可形成系統的整體有限元方程,即
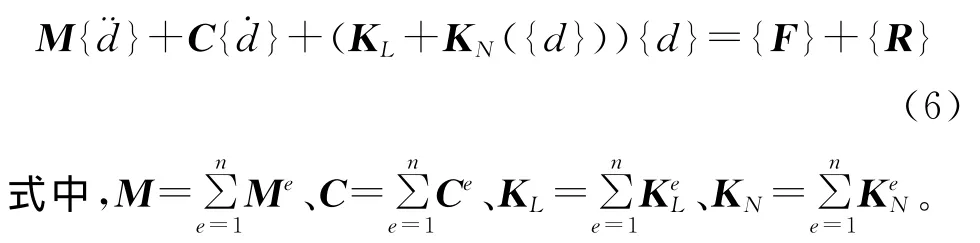
若令K{d}=KL+KN({d}),由于單元的阻尼系數很難確定,一般將阻尼矩陣C處理成整體質量矩陣M、整體剛度矩陣K({d})的線性組合,即

式中,a和b為系數,可由問題的性質和相關實驗確定;M取決于梁單元的長度和密度,在式(6)中可視其為已知的系數矩陣;K({d})取決于該方程的解,可以通過迭代的方式求得。真正在求解方程之前需要了解等效節點載荷向量{F}以及約束支反力向量{R},它取決于整個抽油桿在井筒中的受力情況。
2 抽油桿單元節點力向量
抽油桿單元在井筒中的受力情況如圖2所示,單元受到垂向下方向上的均布載荷q和單位長度上桿、液摩擦力矩Mm。按照右手定則,Mm的方向與局部坐標系中的x方向重合。其中,
設i節點的井斜角為αi,j節點的井斜角為αj,則有

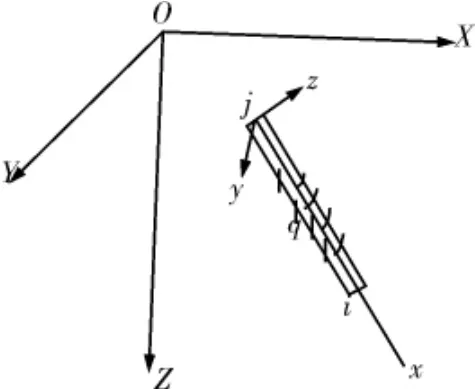
圖2 抽油桿單元均布載荷分析
抽油桿單元的軸向位移函數u(x)、撓度函數v(x)、撓度函數ω(x)、截面轉角函數θ(x)的插值模式[8]為
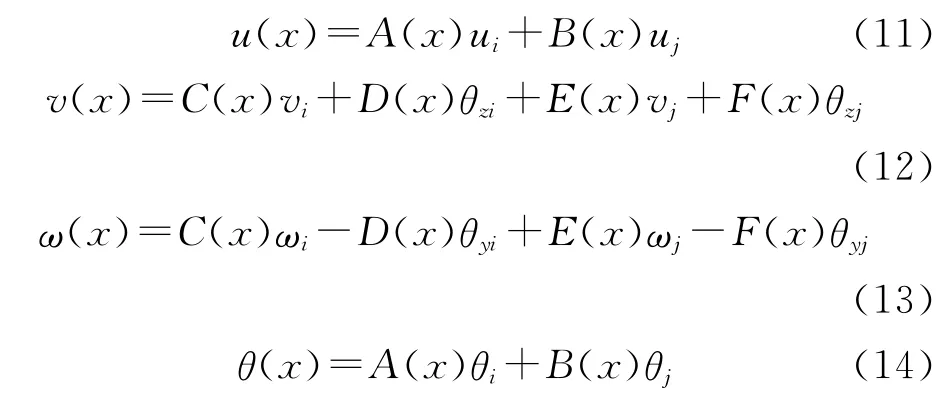
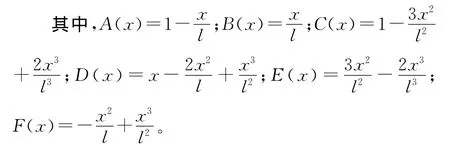
式中,l為抽油桿單元的長度;x為單元局部坐標系中抽油桿任意截面的位置。
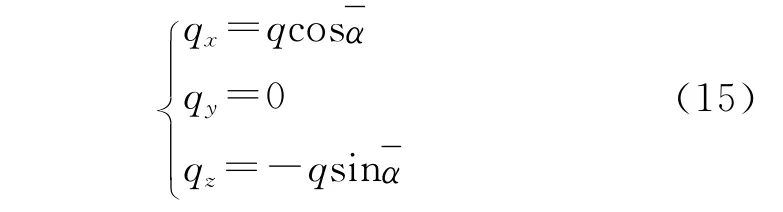
局部坐標系中,y軸方向上的節點剪切力Qyi、Qyj和平面xoy內的彎矩Mzi、Mzj由y方向上的載荷引起;z軸方向上的節點剪切力Qzi、Qzj和平面xoz內的彎矩Myi、Myj由z方向的載荷引起;x軸方向上的軸向力Ni、Nj和扭轉力矩Mxi、Mxj由x方向上的載荷引起。載荷q在單元局部坐標系中分解為
根據虛功原理,單元中廣義節點力所做的功與外部載荷q、M所做的功相等,即
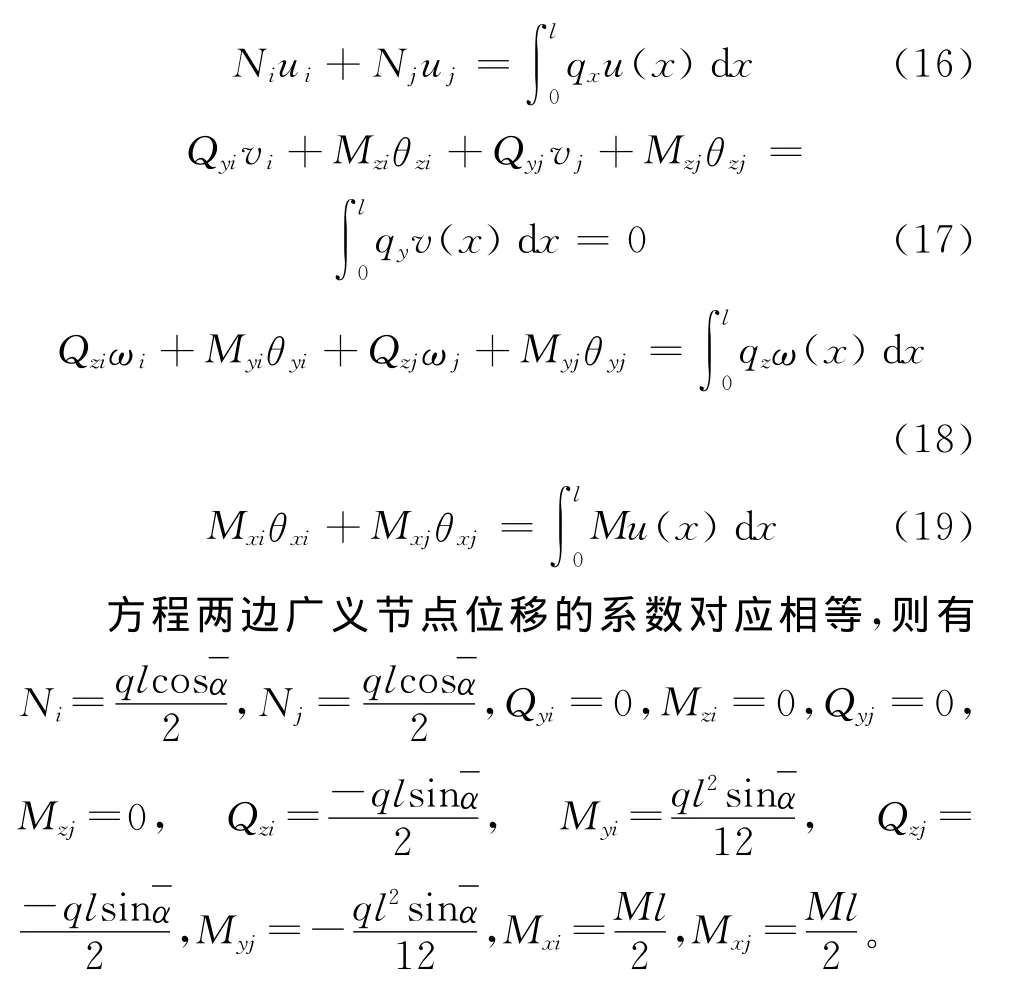
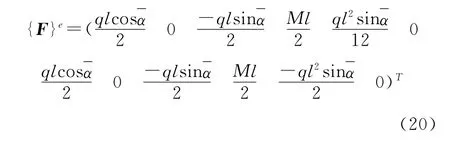
則單元等效節點載荷為
現場鉆井中,實測井眼的數據為不同井深處的井斜角和井眼方位角,利用這些數據和三次樣條插值[9]的數值方法,可以求出任意井深處的井斜角和井眼方位角。
3 整體剛度矩陣裝配過程
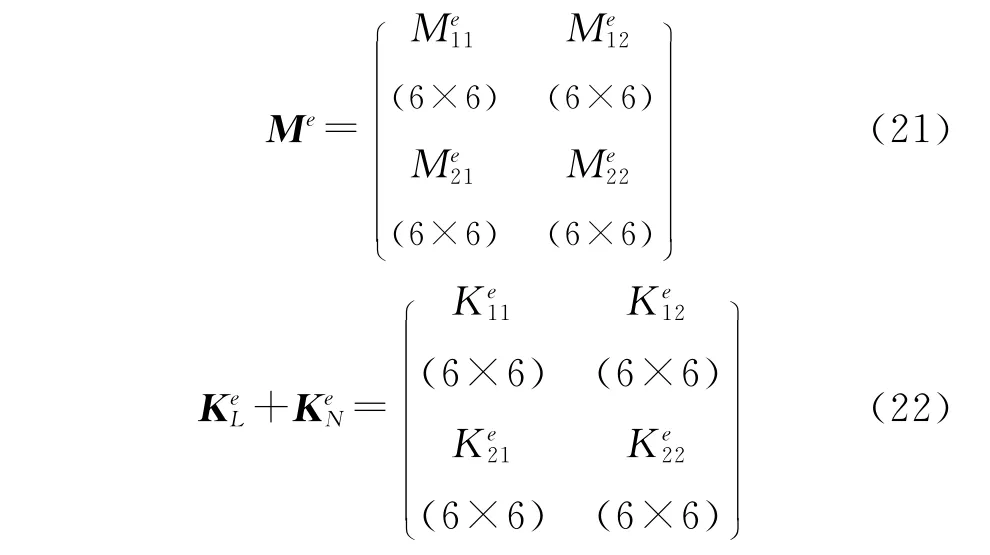
單元質量矩陣Me、單元線性剛度矩陣、單元非線性剛度矩陣顯然都為12×12的矩陣,所以可設
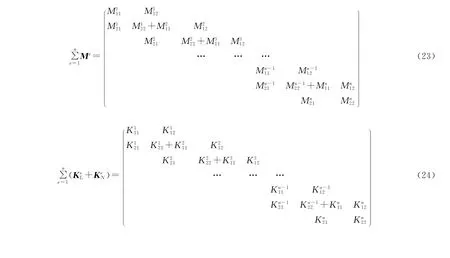
假設整個抽油桿柱劃分為n個單元,由于各抽油桿單元是首尾相接且整個系統是一個非閉合的系統,那么單元裝配成整體過程為
對于單元位移向量{d}e的裝配是按單元順序將所有節點的位移排列在同一個向量里,即


4 約束支反力向量的計算
求解式(6)還需知道約束的支反力向量{R},而抽油桿在沒有安裝扶正器的情況下,約束只存在于抽油桿的頂部和抽油桿底部。抽油桿在其頂部與光桿連接,因此受到向上的軸向力Fa;光桿向抽油桿傳遞輸出軸的動力,所以抽油桿頂部受到地面驅動扭矩T,而地面驅動扭矩會隨著時間發生變化,因此記

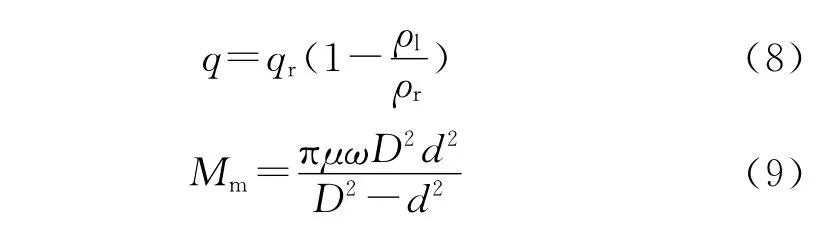
抽油桿帶動井下螺桿泵的轉子旋轉,需要克服轉子與定子摩擦產生的扭矩,其計算公式為

式中,Mμ為轉子、定子間的摩擦力矩,N·m;δ0為轉子、定子間的初始過盈量,mm;n為螺桿泵的轉速,r/min。
螺桿泵轉子克服泵進出口壓差做功,將機械能轉化為井液的勢能,能量轉化關系式為

式中,Mp為螺桿泵工作壓差產生的力矩,N·m;qth為轉子每轉的排量,m3;Δp為螺桿泵工作壓差,Pa。
抽油桿受到的軸向力主要由抽油桿自身重力、抽油桿在采出液中受到的浮力、螺桿泵工作壓差作用在轉子上的力引起。如果可以忽略井斜,則抽油桿頂部軸向載荷為

式中,F1為抽油桿自身產生的重力,N;F2為螺桿泵工作壓差產生的軸向力,作用于抽油桿的底部,N;F3為抽油桿所受到的浮力,N。
式中,L為抽油桿下入深度,m;e為轉子偏心距,m;R為轉子截圓半徑,m。
如果將整個抽油桿柱由下往上劃分為n個單元,并且井口光桿扭矩已經測出,那么約束的支反力向量為
式中,αn為最后一個抽油桿節點處的井斜角。
5 結論
1)螺桿泵抽油桿各個單元由于重力和桿、井液摩擦力矩的作用,在井筒中承受著分布均勻的載荷。利用有限元方法分析抽油桿的受力和運動狀態時,需要將均布的載荷轉化為等效節點載荷,才能計算出各個節點不同方向上的位移和截面轉角。
2)利用抽油桿單元不同方向上的位移插值函數,根據虛功原理,可以求解出各節點的等效載荷。
3)由于各抽油桿單元是首尾相接且整個系統是一個非閉合的系統,整體剛度矩陣是按順序將上一單元剛度矩陣的右下角6×6子矩陣和下一單元剛度矩陣的左上角6×6子矩陣相疊加形成的,對于單元位移向量{d}e的裝配是按單元順序將所有節點的位移排列在同一個向量里。
[1]王春生,鞠國帥.螺桿泵井近泵抽油桿柔度對偏磨的影響[J].石油礦場機械,2011,40(8):7-10.
[2]黨延祖.螺桿泵抽油桿柱瞬態有限元分析[J].石油礦場機械,2010,39(12):37-40.
[3]陳麗英.螺桿泵抽油桿柱工況診斷與斷脫失效分析[J].石油礦場機械,2010,39(9):86-89.
[4]紀國棟.螺桿泵井抽油桿柱扶正器安放位置設計方法[J].石油礦場機械,2010,39(4):71-73.
[5]馬衛國,楊新冰,張利華,等.抽油桿管偏磨成因及解決措施研究綜述[J].石油礦場機械,2009,38(1):22-26.
[6]張佳民,陳會軍,劉巨保.螺桿泵抽油桿柱設計方法及其應用[M].北京:石油工業出版社,2002.
[7]曾 攀.有限元分析及應用[M].北京:清華大學出版社,2004.
[8]呂彥平,吳曉東,李遠超.單螺桿泵井抽油桿柱的有限元分析[J].油氣田地面工程,2006,25(2):54.
[9]袁東錦.計算方法[M].南京:南京師范大學出版社,2004.
猜你喜歡
油氣·石油與天然氣科學(2021年6期)2021-09-10 07:22:44
設備管理與維修(2021年12期)2021-07-28 02:40:04
裝備制造技術(2021年2期)2021-07-21 05:38:22
石油知識(2019年3期)2019-06-29 07:39:16
測控技術(2018年12期)2018-11-25 09:36:58
中國設備工程(2017年16期)2017-08-30 10:23:42
化工管理(2017年22期)2017-03-05 07:21:00
化工管理(2017年35期)2017-03-03 19:17:41
化工設計通訊(2017年11期)2017-03-02 09:58:17
中國煤層氣(2015年1期)2015-08-22 03:05:49