基于飛行品質評估的無人直升機魯棒控制器設計
2012-11-16 08:41:30劉鵬王強蒙志君武哲
航空學報 2012年9期
劉鵬, 王強, 蒙志君,*, 武哲
1. 北京航空航天大學 航空科學與工程學院, 北京 100191 2. 北京航空航天大學 自動化科學與電氣工程學院, 北京 100191
基于飛行品質評估的無人直升機魯棒控制器設計
劉鵬1, 王強2, 蒙志君1,*, 武哲1
1. 北京航空航天大學 航空科學與工程學院, 北京 100191 2. 北京航空航天大學 自動化科學與電氣工程學院, 北京 100191
提出了一種改進的無人直升機H∞回路成形魯棒控制器設計方法。首先將系統辨識技術引入到無人直升機高帶寬控制器設計,根據飛行掃頻數據,得到包含直升機動力學模型耦合特性的非參數頻率響應,依據頻率響應擬合待辨識模型得到無人直升機高精度的飛行動力學模型。然后根據該模型,采用改進的H∞回路成形方法設計了無人直升機內回路控制器,針對H∞回路成形方法中權值矩陣選取困難的問題,利用了最大右約數(GCRD)方法以實現實際系統和期望系統的傳遞函數矩陣之間的轉換。與傳統的對角型權值矩陣相比,使用此方法成形后的系統具有更寬的魯棒穩定裕度,系統的解耦性和頻帶也顯著提高,而且可以大大降低設計人員選取權值矩陣的復雜性和盲目性。通過仿真驗證,所設計的無人直升機系統的飛行品質滿足軍用標準ADS-33E中一級區域的要求。
直升機; 魯棒控制; 系統辨識; 最大右約數;H∞回路成形; 飛行品質
近年來隨著無人直升機飛行控制技術的迅速發展,無人直升機已經引起了國內各航空院校、研究院所和軍方的廣泛關注,但是已有的控制器帶寬較低,而且在風干擾等復雜環境的控制效果一般[1-3]。究其原因就是缺少高精度的飛行動力學模型阻礙了先進的控制算法應用于無人直升機高帶寬控制器設計[4-6]。
頻域辨識方法是建立高精度的無人直升機飛行動力學模型的一種有效方法。直升機的旋翼、發動機和傳動裝置等高階振動將導致飛行試驗中測量噪聲很大,頻域分析可以通過濾波和相干性分析去除噪聲的影響,而通常采用的時域辨識方法由于噪聲對測量信號的影響很大,建立精確的動力學模型比較困難。
H∞回路成形方法是由McFarlane和Glover提出的,它將經典控制理論與現代魯棒控制相結合,是設計多輸入多輸出(MIMO)系統魯棒控制器的一種非常有效的方法[7]。盡管設計者利用工程經驗經常會得到較好的回路成形權值矩陣和控制器,但是在實際設計過程中,如何選取合適的權值矩陣W1和W2得到要求的回路性能指標是很不明顯的。這是因為權值矩陣中的每個變量對回路奇異值的影響往往并不明確,尤其是在設計對象存在嚴重的耦合或者是需要選取非對角型的權值矩陣的時候,而且權值矩陣的選取一般都是靠設計者反復的調整和試湊,非常耗時且帶有很大的盲目性,想要得到一個滿足性能指標且具有較高魯棒性的控制器比較困難。
本文采用頻域辨識方法得到了高精度的無人直升機飛行動力學模型,并以此模型為基礎,利用H∞回路成形方法來設計滿足無人直升機高性能飛行品質的魯棒控制器。在權值矩陣的選取中采用了最大右約數(Greatest Common Right Divisors, GCRD)方法,與傳統方法相比飛行性能有了較大的提升。通過仿真結果的驗證,所設計的無人直升機系統滿足美國軍用標準ADS-33E[8]中關于旋翼機飛行品質的要求。
1 小型無人直升機飛行動力學模型
在辨識試驗中使用的小型無人直升機是由RaPtor50遙控模型直升機改裝而成的,如圖1所示。該平臺具有5路主要操縱輸入,包括總距操縱,航向操縱,橫、縱向周期變距操縱和發動機油門操縱,其中總距和油門操縱存在線性耦合關系。

圖1 試驗使用的無人直升機Fig.1 Instrumented robotic helicopter
使用的無人直升機飛行動力學模型是通過一種改進的頻域系統辨識方法得到的[9]。該方法根據飛行掃頻數據,得到包含直升機動力學模型耦合特性的非參數頻率響應,并根據頻率響應對待辨模型結構進行了簡化。將模式識別理論應用到搜索狀態空間模型代價函數的最小值中,根據機理建模結果擬合頻率響應得到線性的六自由度直升機狀態空間模型。通過時域驗證表明辨識得到的模型精確地反映了該無人直升機的動力學特性。
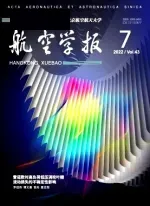
圖2為橫向通道掃頻數據,從圖中可以看到,橫向掃頻輸入和橫滾角速度輸出有很高的一致性,這為系統辨識提供了很好的頻譜特性,可以通過相干函數來判斷一致性,通常相干函數值的下限為0.6,低于此下限,辨識結果會產生比較大的隨機誤差;相干函數值在0.6或者更高時,辨識的模型具有較高的精度[10]。圖3為懸停狀態下辨識得到的模型和飛行試驗數據的頻率響應比較,由圖3可見兩者擬合得非常好。

圖2 橫向通道掃頻數據曲線Fig.2 Lateral sweep data curve



圖3 飛行數據和辨識模型的頻率響應比較Fig.3 Comparison between the frequency response from the flight data and the identified model
2 H∞回路成形控制器設計
2.1 H∞回路成形設計步驟
在得到無人直升機高精度的飛行動力學模型后,采用H∞回路成形方法來設計滿足無人直升機高性能飛行品質的魯棒控制器。H∞回路成形方法的步驟如下[7]:
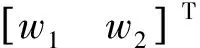
圖4 H∞回路成形結構框圖Fig.4 H∞ loop-shaping standard block diagram
(1)
式中:I為單位矩陣。穩定裕度ε的值在0到1之間,它是系統魯棒性和性能的表征。經過理論和實踐的檢驗,當ε>0.3時認為系統的性能比較好。H∞回路成形的理論基礎是,如果穩定裕度ε的值不是很小,K∞不會改變期望回路Gs的奇異值。
步驟3檢驗閉環回路的時域和頻域響應以確保系統的飛行品質滿足要求,如果不符合則重新調節加權陣并計算K∞,直到閉環系統滿足飛行品質要求。
2.2 內回路設計指標

由于小直升機沒有專門的飛行品質規范,所以控制器設計的最初目標是在保證魯棒性的前提下使得系統帶寬盡可能的高。由于H∞回路成形方法比較容易設定系統帶寬,而且它對于解決多輸入多輸出系統和對象不確定性效果很好,因而它用來解決無人直升機控制問題非常適合[12]。

圖5 內回路控制結構框圖Fig.5 Inner loop block diagram
內回路控制器設計完成后,應用美國軍用標準中的旋翼機飛行品質規范ADS-33E來檢驗小直升機的飛行性能。盡管小直升機的飛行性能相比大直升機來說要高一些,然而考慮到加裝了機載設備后會對小直升機的飛行性能影響較大,而且舵機的帶寬也較低,所以通過設計控制器使得小直升機滿足美軍標中關于大直升機的飛行品質標準,以此來檢驗小直升機的飛行品質是可行的。
在ADS-33E中,對于內回路控制器的飛行品質要求如下[8]:
1) 穩定性
閉環系統所有極點都位于s平面左側,系統單通道的幅值裕度≥6 dB、相角裕度≥45°以保證系統的魯棒性。
2) 帶寬
系統閉環帶寬應滿足ADS-33E等級1中目標對準和跟蹤的指標要求。對于θ、φ和r通道,ADS-33E中系統帶寬ωBW的定義是相角為-135°時的對應的頻率值。θ、φ和r通道的帶寬分別應大于2.0,2.5,3.5 rad/s。對于w通道,ADS-33E中以一階傳遞函數的形式給出了要求的速度響應形式為

(2)
該傳遞函數用來擬合w通道的階躍響應,擬合后的傳遞函數要求滿足時間常數RTw≤5.0和延時τw≤0.2,確認擬合成功與否的代價系數R2的表達式為

(3)

當式(3)的代價系數R2在0.97和1.03之間時,ADS-33E認為擬合成功。
3) 解耦
對于前兩個傳遞函數,ADS-33E規定的階躍響應指標為
式中:分子Δθpk和Δφpk為本通道作階躍變化時所引起的其他通道4 s內的峰值偏離平衡值的差;分母Δφ4和Δθ4為本通道作階躍變化時4 s內的峰值偏離平衡值的差,它們的比值應在規定的范圍內。
對于第3個傳遞函數,ADS-33E等級1中規定的w通道的階躍響應對r通道的解耦要求為
式中:r1為3 s前r的峰值,如果沒有峰值則取r在1 s時的值r(1)作為r1的值,r3的取值為
r3={
r(3)-r1Whenr1>0
-r(3)+r1Whenr1<0
(4)
4) 擾動抑制
各系統的動特性響應指標滿足ADS-33E規范,即在w、r、φ和θ各通道輸入端加一脈沖擾動,系統響應應在10 s內回到峰值的10%范圍內。
2.3 權值矩陣選取的傳統方法
按照2.1節回路成形步驟設計控制器時,其中最關鍵但也是最困難的地方就是步驟1中權值矩陣的選取,如何通過選取合適的W1和W2來使得成形后的系統滿足設計要求,這一過程并不明顯,目前為止尚未有系統的設計方法,大部分情況下依賴于設計人員對回路成形概念的理解和掌握以及在工程上的經驗的積累[13]。
一般情況下,W1和W2都選為對角型矩陣。其中:W1中含有比例積分(PI)環節,積分環節用來提高低頻增益,以提高系統的跟蹤性和對干擾的抑制能力,比例環節用來降低系統由于積分環節引起的在穿越頻域附近的相角延遲;W2中含有低通濾波器來抑制系統高頻段的噪聲。通過W1和W2確保成形后的系統滿足設計要求。
在保證系統魯棒性的前提下,期望成形后的開環系統各通道的穿越頻率不小于7 rad/s,以保證成形后的系統具有較高的帶寬。基于對回路成形概念的理解和掌握以及在工程上的經驗的積累,反復調整后最終所確定的W1和W2的表達式為

(5)

(6)
圖6為回路成形前后系統的奇異值曲線,由圖可以看出,成形后的系統的奇異值曲線滿足低頻高增益的要求,而且開環系統各通道的穿越頻率基本滿足設計要求。

圖6 G和W2GW1的奇異值曲線Fig.6 Singular value curves of G and W2GW1
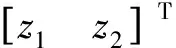
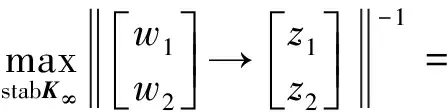
在完成了回路成形設計后,求解不等式(1)得到24階的狀態空間形式的K∞控制器,得到的穩定裕度ε=0.395。圖7給出了解耦后系統w、r、φ和θ通道包含幅值裕度GM和相角裕度PM的單通道Bode圖。由圖可見,各通道都滿足內環控制器中對于系統穩定裕度的指標要求。
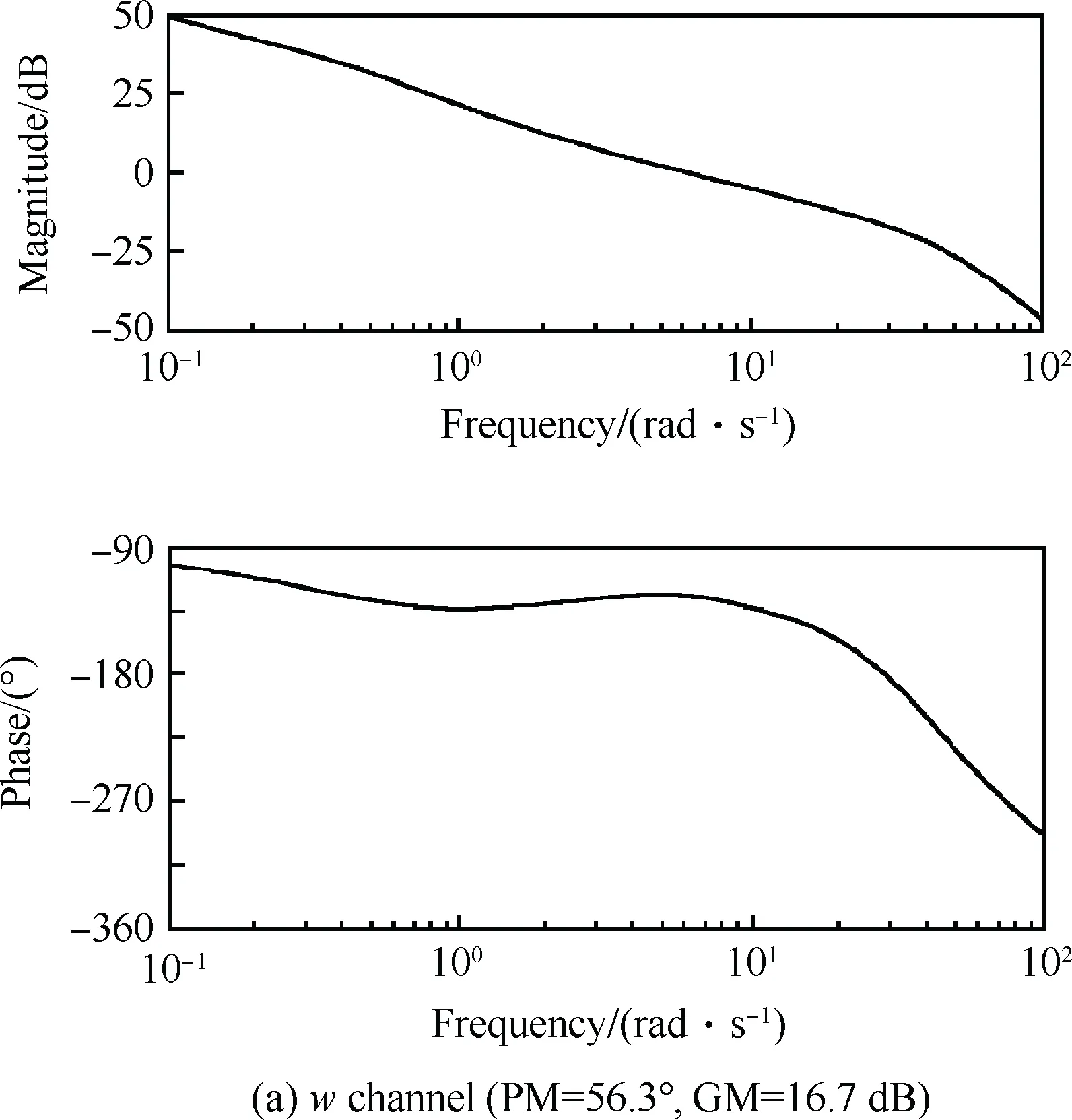
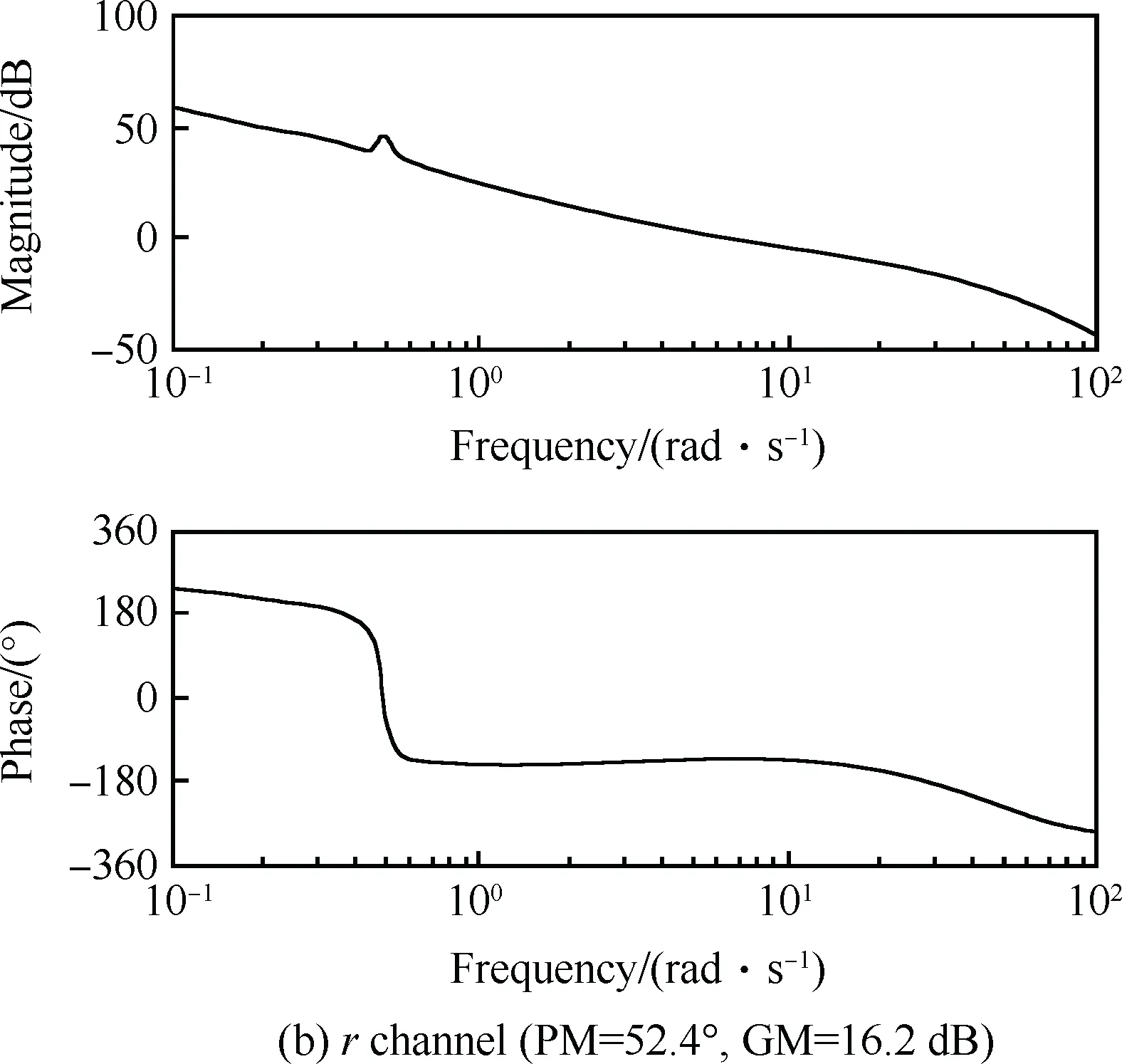


圖7 解耦后系統的Bode圖(傳統方法)Fig.7 Bode plots for decoupling system (traditional method)
2.4 權值矩陣選取的GCRD方法
對于一般的系統而言,通過選取合適的對角形的權值矩陣W1和W2是可以使得成形后的系統滿足系統設計指標的。然而,實際的設計經驗表明,當使用H∞回路成形方法的對象為通道間耦合性很強的復雜系統(如直升機等),使用對角型的權值矩陣進行回路成形設計時不能很好滿足期望的設計指標(通過2.5節的仿真結果比較可以看出)。這時,就需要設計非對角型的權值矩陣來滿足系統期望的設計指標[14]。
本文利用GCRD方法來實現H∞回路成形中實際系統G和期望系統Gs的傳遞函數矩陣之間的轉換:Gs=GW,該方法的相關理論參見文獻[15]。
下面將利用GCRD方法來實現實際系統G和期望系統Gs的傳遞函數矩陣之間的轉換。
第1步需要確定期望系統Gs的表達式,根據期望成形后的開環系統各通道的穿越頻率不小于7 rad/s的要求,最終確定期望成形的系統Gs為
第2步利用GCRD方法求得H∞回路成形中的實際系統G和期望系統Gs的傳遞函數矩陣之間的轉換矩陣W,求得W為13階的傳遞函數矩陣。圖8為實際成形后的系統L2與期望系統Gs的奇異值曲線比較圖,可以看出,實際成形后的系統L2與期望系統Gs的奇異值曲線吻合得非常好。

圖8 L2與Gs的奇異值曲線Fig.8 Singular value curves of the real system L2 and the target system Gs
第3步在完成了回路成形設計后,求解不等式(1)得到26階的狀態空間形式的K∞控制器,得到的穩定裕度ε=0.696。
通過上述設計步驟可以看出,使用GCRD方法在確定了期望系統Gs的表達式之后,可以方便地得到權值矩陣W,不必像傳統方法中去反復調節W1和W2的值以得到滿足指標要求的權值矩陣,而且由于系統耦合較嚴重,調節權值矩陣中的某個變量會對其他通道的奇異值產生影響,如此反復的調整和試湊,非常耗時且帶有很大的盲目性,想要得到一個滿足性能指標且具有較高魯棒性的控制器比較困難。
而且使用GCRD方法得到的控制器階數(26階)和使用傳統方法(24階)的差不多,但是穩定裕度(ε=0.696)卻比傳統方法的(ε=0.395)提高了將近一倍,可見該方法的有效性。
圖9為解耦后系統包含幅值裕度和相角裕度的單通道Bode圖,可以看出各通道的穩定裕度比利用傳統的W1和W2對角陣成形后的系統更大,且遠滿足內環控制器中對于系統穩定裕度的指標要求。




圖9 解耦后系統的Bode圖(GCRD方法)Fig.9 Bode plots for decoupling system(GCRD method)
2.5 飛行品質驗證
2.4節利用權值矩陣選取的GCRD方法重新進行了H∞回路成形設計,并比較了使用GCRD方法和使用W1和W2成形(傳統方法)后系統的穩定裕度,發現使用GCRD方法進行回路成形后系統的穩定裕度明顯提高。下面將針對ADS-33E中對于內回路控制器的飛行品質的其他要求進行對比驗證。
1) 帶寬驗證
表1為考慮了執行機構和傳感器特性的前提下,回路成形后內環的系統帶寬與ADS-33E所規定的指標的對比。表2為w通道的響應速度校驗結果。

表1 校驗系統的帶寬Table 1 Bandwidth evaluations for system
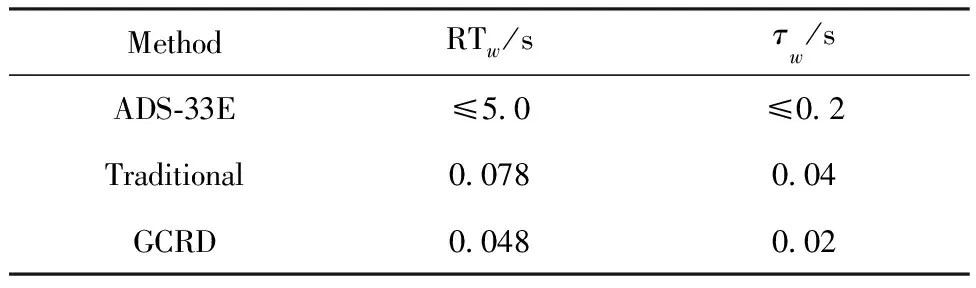
表2 校驗系統的響應速度Table 2 Response speed evaluations for system
2) 解耦性驗證
圖10和圖11分別為使用傳統方法和使用GCRD方法成形后的系統的θ、φ和w通道分別加入5°、5°和1 m/s階躍輸入后的響應曲線。根據階躍響應數據計算飛行品質中關于通道間耦合特性的指標,表3為回路成形后的系統的耦合性與ADS-33E所規定的指標的對比,由圖10、圖11和表3可看出,使用GCRD方法比用傳統方法成


圖10 系統耦合性的階躍響應驗證(傳統方法)Fig.10 Step responses for inter-axis coupling evaluation(traditional method)



圖11 系統耦合性的階躍響應驗證(GCRD方法)Fig.11 Step responses for inter-axis coupling evaluation (GCRD method)


表3 校驗通道間的解耦Table 3 Inter-axis coupling evaluation
3) 擾動抑制驗證
圖12和圖13分別為在使用傳統方法和使用GCRD方法成形后的系統的θ、φ、w和r通道分別加入幅值為1、寬度為1 s的脈沖擾動輸入后的響應曲線。由圖可以明顯看出,使用兩種方法后的各通道的響應在10 s內都已經回到峰值的10%范圍內,而且使用GCRD方法后的系統對擾動的恢復的時間比傳統方法的更短,且振蕩很小,說明使用GCRD方法后的系統對擾動的抑制更強。
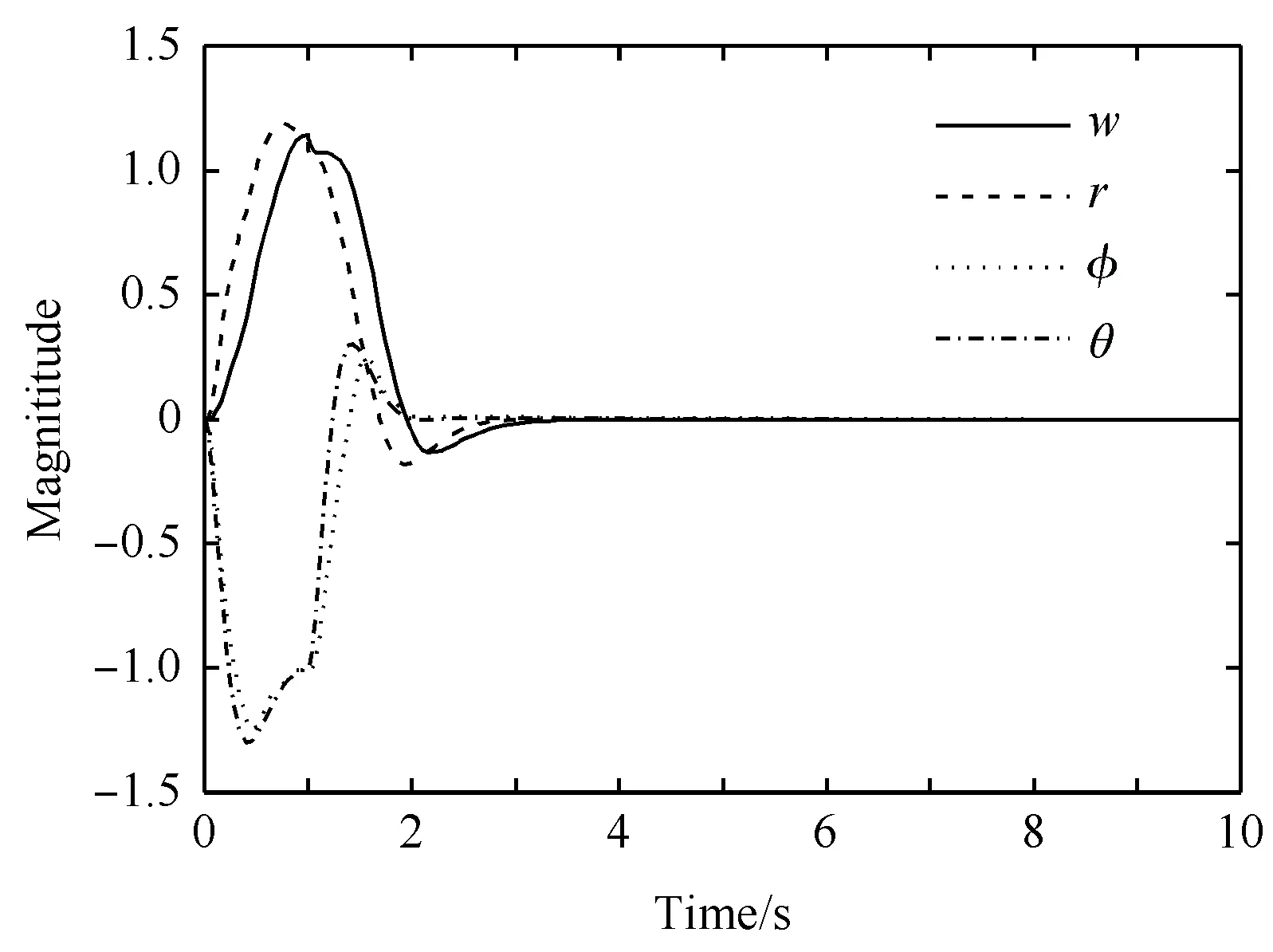
圖12 系統脈沖擾動響應(傳統方法)Fig.12 Normalized responses to pulse disturbance (traditional method)

圖13 系統脈沖擾動響應(GCRD方法)Fig.13 Normalized responses to pulse disturbance (GCRD method)
綜上仿真比較可以看出,使用GCRD方法進行H∞回路成形后的系統比使用傳統方法的前置和后置的對角型權值矩陣W1和W2成形后的系統的飛行品質更高,更能滿足ADS-33E中對于內回路控制器的飛行品質的要求。
3 結 論
本文采用了頻域辨識建模和H∞回路成形方法來設計無人直升機高帶寬魯棒控制器,其中重點研究了以下幾個問題:
1) 根據飛行試驗數據,采用頻域系統辨識的方法得到無人直升機精確的動力學模型,以此模型為基礎設計了高帶寬魯棒控制器。
2) 采用H∞回路成形方法設計無人直升機內環控制器,實現系統的解耦和姿態穩定,并保證控制系統具有高帶寬。
3) 通過仿真驗證,GCRD方法是解決H∞回路成形中權值矩陣選取的一種有效方法,使用此方法設計后的系統滿足ADS-33E中關于一級飛行品質的所有要求。
[1] Kim H J, Shim D H, Sastry S. Flying robots: modeling, control and decision making. Proceedings of the 2002 IEEE International Conference on Robotics and Automation, 2002: 66-71.
[2] Roberts J M, Corke P, Buskey G. Low-cost flight control system for a small autonomous helicopter. Proceedings of the 2002 Australasia Conference on Robotics and Automation, 2002: 546-551.
[3] Shim D H, Kim H J, Sastry S. Decentralized nonlinear model predictive control of multiple flying robots. Proceedings of the 42nd IEEE Conference on Decision and Control, 2003: 3621-3626.
[4] Isidori A, Marconi L, Serrani A. Robust nonlinear motion control of a helicopter. IEEE Transactions on Automatic Control, 2003, 48(3): 413-426.
[5] Ekblad M.Reduced-order modeling and controller design for a high performance helicopter.Journal of Guidance, Control and Dynamics, 1990, 13(3):439-449.
[6] Enns R, Si J. Helicopter trimming and tracking control using direct neural dynamic programming. IEEE Transactions on Neural Networks, 2003, 14(4): 929-939.
[7] McFarlane D C, Glover K. A loop shaping design procedure using synthesis. IEEE Transactions on Automatic Control, 1992,37(6): 759-769.
[8] Baskett B J. ADS-33E, Aeronautical design standard performance specification handling qualities requirements for military rotorcraft. Alabama: United States Army Aviation and Missile Command, 2000.
[9] Liu P, Wu Z. Modified frequency identification method and its application in helicopter modeling. Control Theory & Application, 2011, 28(12): 1747-1753.(in Chinese)
劉鵬, 武哲.改進的頻域辨識方法及其在無人直升機建模中的應用. 控制理論與應用, 2011, 28(12): 1747-1753.
[10] Tischler M B, Remple R K. Aircraft and rotorcraft system identification: engineering methods with flight test examples. Virginia: American Institute of Aeronautics and Astronautics Press, 2006: 25-53.
[11] Miller R H. A method for improving the inherent stability and control characteristics of helicopters. Journal of Aeronautical Sciences, 1950,17(6): 363-374.
[12] La Civita M, Papageorgiou G, Messner W. Design and flight testing of a high-bandwidthH∞loop shaping controller for a robotic helicopter. AIAA-2002-4836, 2002.
[13] Li W J. Robust control based on loop shaping. Harbin: Department of Control Science & Engineering, Harbin Institute of Technology, 2006. (in Chinese)
李衛江. 基于回路成形的魯棒控制研究. 哈爾濱: 哈爾濱工業大學控制科學與工程系, 2006.
[14] Lanzon A. Weight optimization inH∞loop-shaping. Automatic, 2005, 41: 1201-1208.
[15] Le V X, Safonov M G. Rational matrix GCD’s and the design of squaring-down compensators—a state space theory. IEEE Transactions on Automatic Control, 1992,36(3): 384-392.
UnmannedHelicopterRobustControllerDesignBasedonAircraftFlyingQualitiesEvaluation
LIUPeng1,WANGQiang2,MENGZhijun1, *,WUZhe1
1.SchoolofAeronauticScienceandEngineering,BeihangUniversity,Beijing100191,China2.SchoolofAutomationScienceandElectricalEngineering,BeihangUniversity,Beijing100191,China
Arobustautomaticflightcontrolsystemisdesignedforasmallscaleunmannedhelicopterinthispaper.Wefirstapplysystemidentificationtothedesignofahigh-bandwidthcontrollerforrobotichelicopters.Theoverallconceptistoextractacompletesetofnon-parametricinput-to-outputfrequencyresponsesthatfullycharacterizethecoupledhelicopterdynamics,andthenapplyanonlinearsearchalgorithmforalinearhigh-fidelitysimulationmodelthatmatchesthefrequencyresponsedataset.TheH∞loop-shapingmethodisusedtodesigntheinnerloopoftheunmannedhelicopterbasedontheidentifiedmodel.Thegreatestcommonrightdivisors(GCRD)methodisemployedtomovethetransferfunctionmatrixfromtherealsystemtothetargetsystem,whichisaveryusefulwaytosolvethedifficultiesinchoosingaproperweightingmatrixinH∞loop-shaping.Comparedwiththetraditionalmethod,thesystemusingthenewmethodexhibitsalargerrobuststabilitymargin,andthedecouplingandthebandwidthofthesystemarealsoimprovedconsiderably.Furthermore,itreducesthecomplexityandblindnessforthedesignertofindtheproperweightingmatrix.ThesimulationresultsprovethattheunmannedhelicoptersystemachievesatoplevelcontrolperformancethatconformsrelevantrequirementsinmilitarystandardsADS-33E.
helicopter;robustcontrol;systemidentification;greatestcommonrightdivisors;H∞loop-shaping;aircraftflyingqualities
2011-12-28;Revised2012-03-12;Accepted2012-03-19;Publishedonline2012-05-201359
URL:www.cnki.net/kcms/detail/11.1929.V.20120520.1359.018.html
.Tel.:010-82338797E-mailmengzhijun@buaa.edu.cn
2011-12-28;退修日期2012-03-12;錄用日期2012-03-19; < class="emphasis_bold">網絡出版時間
時間:2012-05-201359
www.cnki.net/kcms/detail/11.1929.V.20120520.1359.018.html
.Tel.:010-82338797E-mailmengzhijun@buaa.edu.cn
LiuP,WangQ,MengZJ,etal.Unmannedhelicopterrobustcontrollerdesignbasedonaircraftflyingqualitiesevaluation.ActaAeronauticaetAstronauticaSinica,2012,33(9):1587-1597. 劉鵬,王強,蒙志君,等.基于飛行品質評估的無人直升機魯棒控制器設計.航空學報,2012,33(9):1587-1597.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
1000-6893(2012)09-1587-11
V212.4; TP273
A
劉鵬男,博士研究生。主要研究方向:飛行力學,系統辨識,飛行控制。
Tel: 010-82338797
E-mail: lppl2008@163.com
王強男,博士研究生。主要研究方向:飛行控制。
Tel: 010-82338797
E-mail: teddywang_0929@126.com
蒙志君男,博士,講師。主要研究方向:飛行器總體設計。
Tel: 010-82338797
E-mail: mengzhijun@buaa.edu.cn
武哲男,博士,教授,博士生導師。主要研究方向:飛行器總體設計,飛行器隱身設計。
Tel: 010-82338797
E-mail: wuzhe@buaa.edu.cn
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56