多螺旋槳太陽能無人機橫航向操穩(wěn)特性研究
2012-11-03 01:13:28王睿祝小平周洲
飛行力學 2012年1期
王睿, 祝小平, 周洲
(1.西北工業(yè)大學 無人機特種技術(shù)國家重點實驗室, 陜西 西安 710072;2.西北工業(yè)大學 無人機研究所, 陜西 西安 710072)
多螺旋槳太陽能無人機橫航向操穩(wěn)特性研究
王睿1, 祝小平2, 周洲1
(1.西北工業(yè)大學 無人機特種技術(shù)國家重點實驗室, 陜西 西安 710072;2.西北工業(yè)大學 無人機研究所, 陜西 西安 710072)
首先分析了大型高空長航時太陽能無人機由于超大展弦比和高效多螺旋槳帶來的航向阻尼增量和航向操縱導數(shù),接著分析了由此帶來的橫航向動態(tài)特性變化,并結(jié)合多螺旋槳的操縱特性,提出了多槳航向控制方法,最后進行了仿真驗證。結(jié)果表明,分布式多槳布局對提高該類無人機的橫航向穩(wěn)定性有較大作用,以多槳的轉(zhuǎn)速變化量最小為目標的最優(yōu)化航向控制分配方法對超長航時飛行很有利。
太陽能無人機; 多螺旋槳; 動態(tài)特性; 最優(yōu)航向控制
引言
太陽能無人機由于不受能源的限制,理論上可以實現(xiàn)“永久飛行”,特別適合執(zhí)行超長時間的偵察、監(jiān)視和通信中繼等任務,因此是未來無人機的一個重要發(fā)展方向。國外已經(jīng)出現(xiàn)了多種型號的高空長航時太陽能無人機,而國內(nèi)正處于快速起步階段[1]。
對于大型高空長航時太陽能無人機,由于太陽能的能量有限,為了實現(xiàn)高空超長航時飛行,需要具有很高的升阻比和推進效率,因此展弦比很大,而且由于單臺螺旋槳難以滿足大型高空長航時太陽能無人機的動力需求,因此多螺旋槳成為必然選擇[2]。最典型的高空長航時太陽能無人機是美國的“太陽神”,其翼展75.3 m,展弦比31,由于太陽能的功率有限,所以最大平飛速度只有51.5 km/h[3],其中的HP01型采用了14個分布式寬弦定距螺旋槳,HP03型采用了10個槳,每個槳直徑2 m,航向控制通過外側(cè)8個槳的差動實現(xiàn)[4]。
大直徑多螺旋槳以及超大展弦比的布局給大型高空長航時太陽能無人機帶來了比常規(guī)飛機更明顯的附加氣動力,影響了太陽能無人機很多方面的特性,在方案設計階段必須進行充分評估。另外,多槳給航向控制帶來了更多選擇方案,如何在不影響超長續(xù)航時間的前提下進行最優(yōu)航向控制,也是一個值得研究的關(guān)鍵問題。本文從操穩(wěn)特性角度出發(fā),首先分析了多螺旋槳產(chǎn)生的附加氣動導數(shù),然后分析了其對太陽能無人機橫航向動態(tài)特性的影響,最后進行了多螺旋槳的最優(yōu)航向控制研究。
1 附加氣動導數(shù)分析
本文所研究的太陽能無人機如圖1所示。考慮到鋪設太陽能電池板以及氣動彈性等原因,沒有配置副翼,沿翼展方向均布了8個螺旋槳,航向控制通過螺旋槳的差動來實現(xiàn)。為了敘述方便,把對稱的兩個槳分為一組,從翼根到翼尖分別為δp1~δp4,每一組槳分別標有下標l和r以區(qū)分左右兩邊,下文將該布局簡稱為“多槳”。為了對比分析多槳對操穩(wěn)特性的影響,還引入了在對稱面上布置單個槳的布局,簡稱為“單槳”。
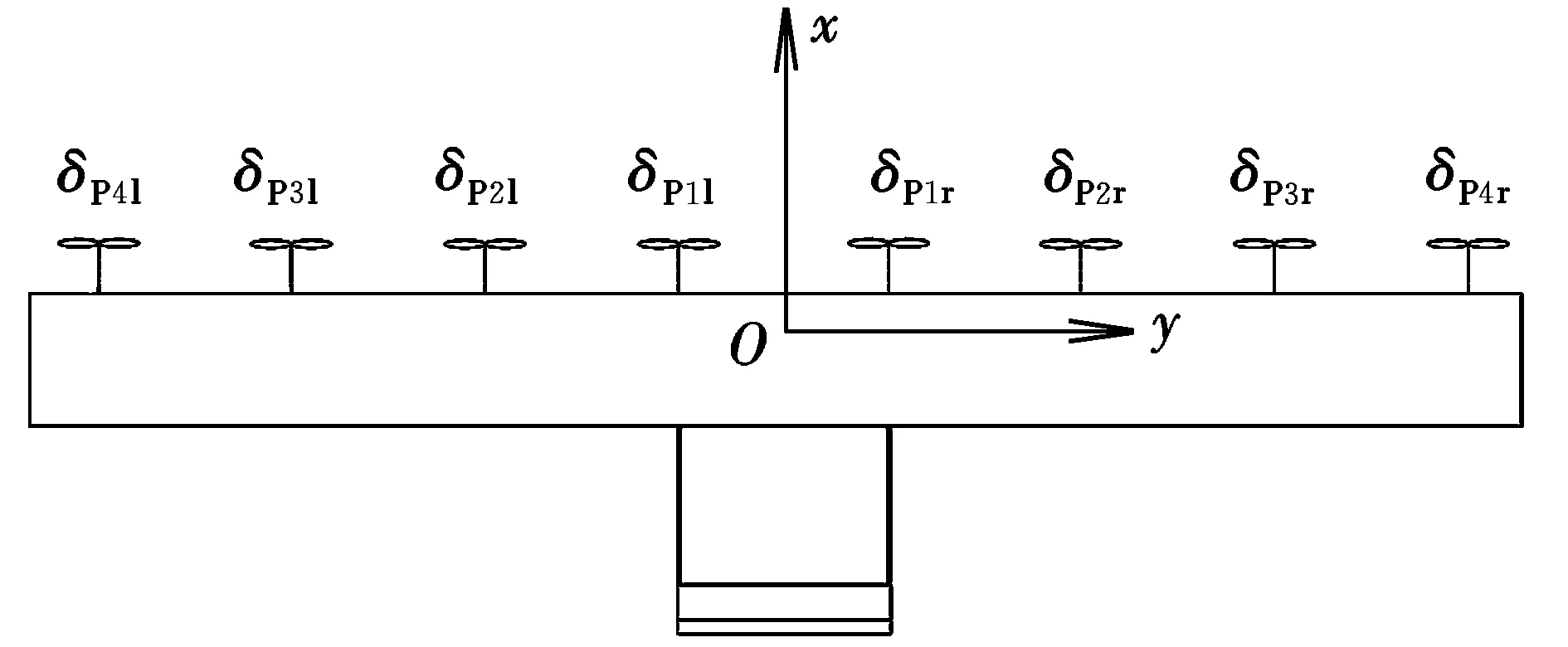
圖1 多槳太陽能無人機布局示意圖
該無人機所采用的螺旋槳在巡航飛行狀態(tài)的特性曲線如圖2所示。巡航飛行時螺旋槳工作在最大效率的設計點,這時其效率為81%左右,且由圖可見,該槳在設計點附近的效率(η)隨前進比(J)變化很平緩,推力系數(shù)(CT)隨前進比的增加基本上是線性減小。
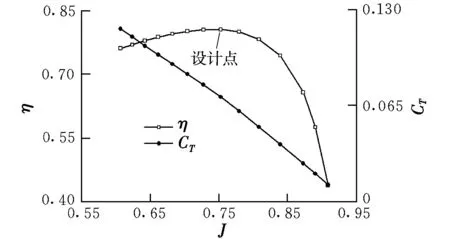
圖2 螺旋槳特性曲線
1.1 航向阻尼導數(shù)
螺旋槳決定了推力,所以它首先影響了推力對速度的導數(shù);另外,由于展弦比很大,而螺旋槳又是在機翼上均布的,所以當無人機產(chǎn)生偏航角速度時,機翼兩邊具有較大的飛行速度差,尤其是因為無人機的飛行速度很低,使得該速度差的相對值很大。
當無人機有偏航角速度時,不在重心位置的螺旋槳的相對來流速度發(fā)生了變化,所以相對基準狀態(tài)產(chǎn)生了一個推力增量。由于對電機的控制,可以假設受擾動過程中螺旋槳轉(zhuǎn)速不變,槳之間以及槳與機翼之間沒有氣動干擾,則推力增量可以表示為:
(1)
式中,i為槳的編號;Tv為推力對速度的導數(shù);v,y,r分別為來流速度、槳到無人機對稱面的位置矢量和無人機的偏航角速度。
由推力增量產(chǎn)生的附加偏航力矩為:
(2)
因此,可求得附加的偏航阻尼大導數(shù)為:
(3)
在方案的初步設計階段,可以認為Ixz=0,這時有:
(4)
根據(jù)式(3)也可以推導得到附加的偏航阻尼小導數(shù)為:
(5)
式中,S,b分別為無人機的機翼面積和展長。
由上式可見,若Tv和y越大,則附加的偏航阻尼導數(shù)越大。
(6)
式中,η和P分別為螺旋槳的效率和軸功率。
根據(jù)一般的螺旋槳特性曲線[5],在設計點,當轉(zhuǎn)速不變時,有?η/?v=0,而且一般?Cp/?J<0且是一個絕對值較大的常值。由于太陽能無人機的螺旋槳效率很高而飛行速度很低,所以Tv一般是絕對值較大的負值。
在高空巡航飛行狀態(tài),螺旋槳轉(zhuǎn)速不變時,可根據(jù)圖2和相關(guān)公式求得本無人機的Tv,進而可求得單槳和多槳布局的氣動導數(shù),如表1所示。

1.2 航向操縱導數(shù)

式中,δp為螺旋槳的相對轉(zhuǎn)速差;np為螺旋槳的轉(zhuǎn)速。
假設航向控制過程中飛行速度不變,則有:

(7)

由上面的公式可求得右側(cè)機翼從內(nèi)到外的各個槳的航向操縱導數(shù)Cnδp1r,Cnδp2r,Cnδp3r,Cnδp4r分別為:-0.003 3,-0.009 8,-0.016 4,-0.022 9。
文獻[6]中給出了Navion,Beoing 747和某型飛翼的航向操縱導數(shù)Cnδr分別為-0.072,-0.090和-0.005。注意到本機的δp∈[0,1],而且多槳具有對稱性和疊加性,以及其它方向的耦合操縱力矩很小,因此可知本太陽能無人機多槳差動的航向操縱方式效率較高。
2 動態(tài)特性分析
采用縱向和橫航向分離的小擾動方程,代入上節(jié)得到的由多槳引起的附加航向阻尼導數(shù)后,可得到單槳、多槳兩種情況的無人機橫航向特性,如表2所示。
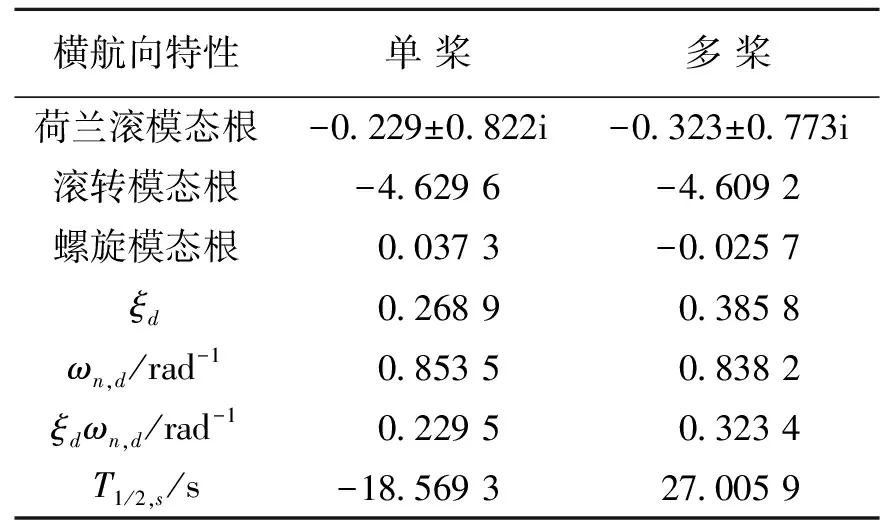
表2 不同槳布局的無人機橫航向特性對比
表中,ξd,ωnd,ξdωnd和T1/2,s分別表示荷蘭滾模態(tài)的阻尼比、頻率、總阻尼和螺旋模態(tài)的半衰時,若T1/2,s為負值,則表示該模態(tài)是不穩(wěn)定的,對應的值是倍增時。
由表2可見,從單槳到多槳布局,滾轉(zhuǎn)模態(tài)差別很小,荷蘭滾模態(tài)的頻率差別也很小,而荷蘭滾模態(tài)的阻尼和螺旋模態(tài)的阻尼在多槳布局下得到了很大的提高,尤其是使得螺旋模態(tài)從不穩(wěn)定變成穩(wěn)定的。
以上結(jié)論也可以從特征根的簡化表達式得到驗證。螺旋模態(tài)的特征根表達式為[7]:
(8)
荷蘭滾模態(tài)的阻尼比表達式為:
(9)

3 多螺旋槳的航向控制方法
無人機的航向通過左右兩邊螺旋槳的差動來實現(xiàn),而該無人機具有4對螺旋槳,因此需要研究多螺旋槳的優(yōu)化控制問題。
由于巡航飛行時槳工作在最大效率的設計點,而由圖2可見,偏離設計點越大,槳的效率下降越快,平飛所需的能量也將越大。因此為了進行超長航時飛行,航向控制時,希望在滿足操縱轉(zhuǎn)矩需求的前提下,所有槳的轉(zhuǎn)速變化量(總控制量)最小。用數(shù)學語言描述該最優(yōu)控制問題為:
(10)
式中,Bp為螺旋槳的航向操縱矩陣;nd為期望的航向操縱轉(zhuǎn)矩,可以根據(jù)控制目標采用多種控制方法得到。
(11)
把式(11)代入式(10),并根據(jù)拉格朗日乘子法,可求得上述最優(yōu)化問題的解為:
(12)
根據(jù)式(7),考慮到每個電機、螺旋槳的規(guī)格相同、初始工作狀態(tài)相同而且等距、對稱地布置在機翼上的特殊情況(本無人機的配置),最優(yōu)化控制量為:
(13)
4 仿真驗證
當只用螺旋槳差動進行航向控制時,根據(jù)文獻[8]中的虛擬舵控制律設計方法得到nd,然后采用式(13)的最優(yōu)控制分配方法,得到在180°轉(zhuǎn)彎時的無人機響應和右側(cè)機翼的螺旋槳相對差動量分別如圖3和圖4所示。
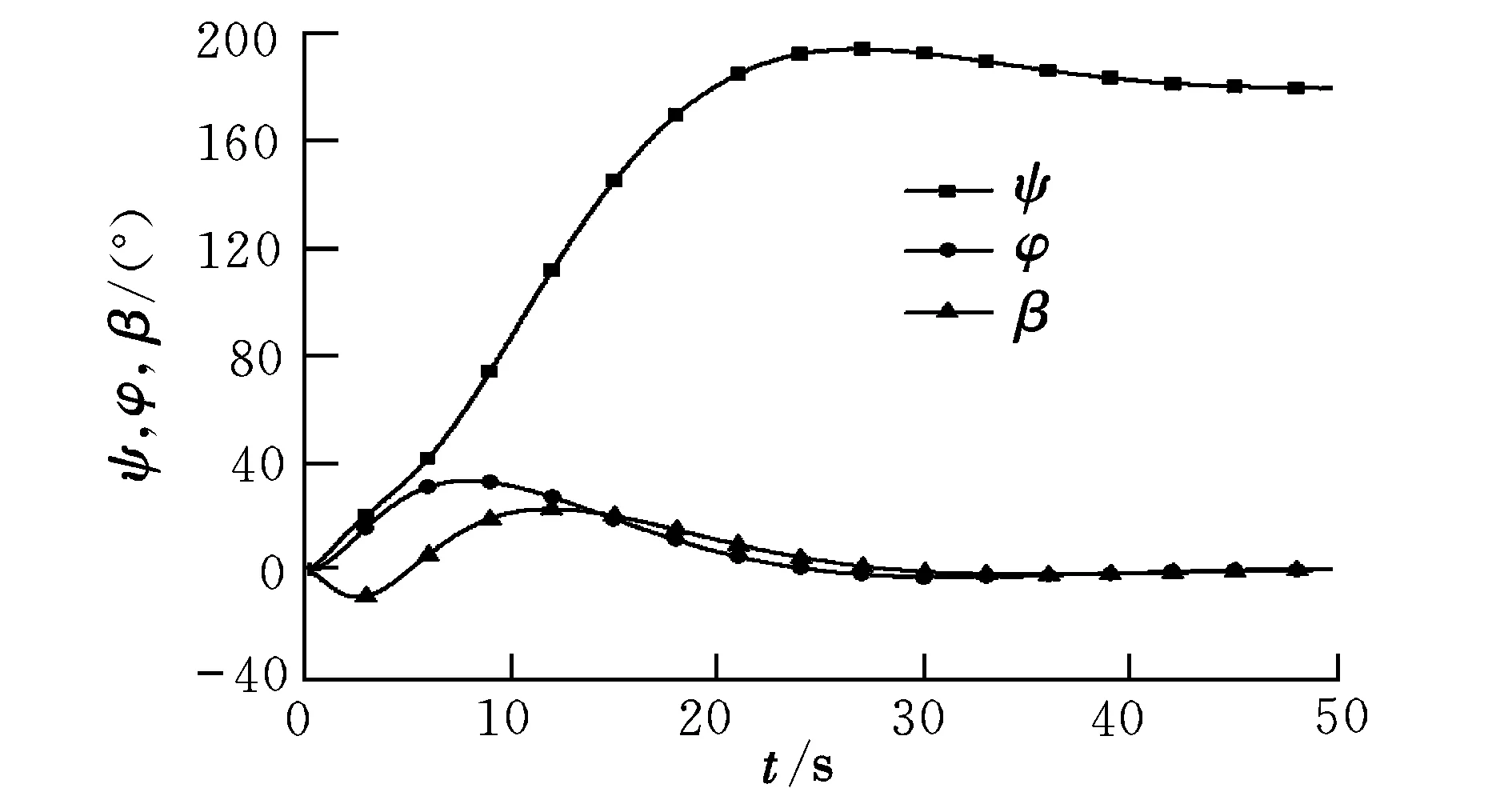
圖3 180°轉(zhuǎn)彎時的無人機響應
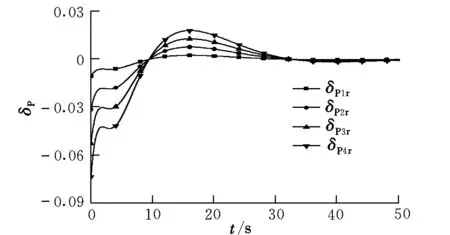
圖4 180°轉(zhuǎn)彎時的右側(cè)螺旋槳操縱量
由圖可見,無人機的參數(shù)響應合理,而且通過分析發(fā)現(xiàn),初始時刻槳的前進比J平均變化量為5.6%,這時的槳效率下降1%左右,而在3 s后J偏差很快下降到0.4%以內(nèi),槳效率下降在0.2%以內(nèi)。這是在航向角控制量較大的情況下得到的,如果減小航向控制量,或者進行控制輸入的淡化處理以減小初始控制量[9],還能進一步減小槳的差動控制量,說明了所提出的長航時飛行條件下的多槳差動航向控制分配方法可行。
5 結(jié)論
根據(jù)本文分析,得到了以下結(jié)論:
(1)基于螺旋槳效率曲線的拉力差計算能夠得到由螺旋槳產(chǎn)生的附加偏航阻尼導數(shù)和航向操縱導數(shù)。采用該方法分析發(fā)現(xiàn),本文所研究的大型高空長航時太陽能無人機由于超大展弦比、低飛行速度、高效率分布式多螺旋槳的布局使航向阻尼明顯增大,多槳差動的航向控制效率也較高;
(2)多螺旋槳引起的航向阻尼增量使該類型無人機的荷蘭滾模態(tài)阻尼和螺旋模態(tài)的穩(wěn)定性都明顯增加;
(3)所提出的以槳的轉(zhuǎn)速變化量最小為目標的最優(yōu)化航向控制分配方法,能以最小的螺旋槳差動量進行有效的航向控制,對螺旋槳工作在最大效率點的超長航時飛行很有利。
[1] 高廣林,李占科,宋筆鋒,等.太陽能無人機關(guān)鍵技術(shù)分析[J].飛行力學,2010,28(1):1-4.
[2] Giulio Romeo,Giacomo Frulla.Heliplat:aerodynamic and structural analysis of HAVE solar powered platform [R].AIAA 2002-3504,2002.
[3] 《國外無人機大全》編寫組.國外無人機大全[M].北京:航空工業(yè)出版社,1999.
[4] Thomas E Noll,Stephen D Ishmael,Bart Henwood,et al.Investigation of the helios prototype aircraft mishap,volume I-mishap report [R].NASA Report,2004.
[5] 《飛機設計手冊》總編委會.飛機設計手冊(第13冊):動力裝置系統(tǒng)設計[M].北京:航空工業(yè)出版社,2006.
[6] 馬松輝,吳成富,陳懷民.飛翼飛機穩(wěn)定性與操縱性研究[J].飛行力學,2006,24(3):17-21.
[7] 方振平,陳萬春,張曙光.航空飛行器飛行動力學[M].北京:北京航空航天大學出版社,2005.
[8] 王鵬.飛翼式長航時無人機輪式起降控制技術(shù)研究[D].西安:西北工業(yè)大學,2009.
[9] 申安玉,申學仁,李云保,等.自動飛行控制系統(tǒng)[M].北京:國防工業(yè)出版社,2003.
Researchonlateral-directionalflyingqualitiesofmulti-propellersolarpoweredUAV
WANG Rui1, ZHU Xiao-ping2, ZHOU Zhou1
(1.National Key Laboratory of Science and Technology on UAV, NWPU, Xi’an 710072, China;2.UAV Research Institute, NWPU, Xi’an 710072, China)
This paper analyzed additional derivatives of the yaw damping and control resulted from multi-propeller and large aspect-ratio wing for the high altitude long endurance (HALE) solar powered UAV, and then carried out further researches on the difference between LAT-DIR dynamic properties, then, an optimal yaw control allocation method for the purpose of minimizing the total rotate speed of multi-propeller was proposed and validated by simulation. The results show that the large aspect-ratio wing integrated with multiple propellers can improve its LAT-DIR stabilities significantly, and the proposed optimal yaw control allocation method is very favorable for long endurance flight.
solar powered UAV; multi-propeller; dynamic property; optimal yaw control
2011-04-08;
2011-09-08
國防基礎(chǔ)科研基金資助(A2720060290);中國博士后科學基金資助(20100471637)
王睿(1981-),男,廣西百色人,博士,研究方向為無人機飛行動力學與控制;祝小平(1963-),湖南衡陽人,教授,博士生導師,主要研究方向為無人機系統(tǒng)總體設計、控制與制導。
V212; V279
A
1002-0853(2012)01-0005-04
(編輯:姚妙慧)
猜你喜歡
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數(shù)理化(高中版.高考數(shù)學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
時代英語·高二(2015年1期)2015-03-16 00:08:11
上海電機學院學報(2015年4期)2015-02-28 14:30:00
中國衛(wèi)生(2014年11期)2014-11-12 13:11:32
計算物理(2014年2期)2014-03-11 17:01:39