傾斜轉彎高超聲速飛行器滑模變結構解耦控制
2012-11-03 01:23:57熊柯夏智勛郭振云
飛行力學 2012年1期
熊柯, 夏智勛, 郭振云
(國防科學技術大學 航天與材料工程學院, 湖南 長沙 410073)
傾斜轉彎高超聲速飛行器滑模變結構解耦控制
熊柯, 夏智勛, 郭振云
(國防科學技術大學 航天與材料工程學院, 湖南 長沙 410073)
針對在傾斜轉彎時高超聲速飛行器自動駕駛儀設計中系統參數不確定和干擾嚴重、各通道之間存在強烈耦合的問題,提出了一種全局積分滑模變結構解耦控制方法。該方法基于滑動模態對匹配的參數不確定和外界干擾的不變性原理,采用了一種全局積分型的滑模面,使系統在初始階段就處于滑模態,同時通過滑模函數反饋削弱參數攝動及干擾產生的滑模誤差,實現了各輸出之間的全程解耦和魯棒穩定。仿真結果證實了所提方法具有良好的跟蹤性能和魯棒性,能滿足高超聲速飛行器傾斜轉彎協調控制的要求。
傾斜轉彎; 高超聲速; 解耦設計; 全局積分滑模
引言
傾斜轉彎技術可以滿足高超聲速飛行器氣動外形與沖壓發動機兼容的要求,保證超燃沖壓發動機處于良好的工作狀態,提高迎角使用范圍,增強飛行器的側向機動能力和滾動穩定性。但由于飛行器外形不對稱,同時要繞速度矢量快速滾轉,導致了飛行器動力學中必然存在三種耦合:氣動耦合、運動學耦合和慣性耦合[1-3],通道間的耦合使得飛行器在傾斜轉彎時容易誘發較大的側向過載和側滑角,而傾斜轉彎協調控制要求側滑角近似為零,這使得高超聲速飛行器自動駕駛儀的解耦設計成為關鍵問題。
由于飛行器在高超聲速飛行中氣動系數不確定性嚴重,而且還會受到各種干擾,因此要保證控制系統快速、精確的控制,就需要保證三通道解耦的同時具有強魯棒性。滑模變結構控制是一種很好的魯棒解耦設計工具,其魯棒解耦的理論基礎是滑動模態的不變性原理,具有滑動模態的變結構系統對外界干擾和參數攝動有很強的魯棒性[4-6]。為了在輸出解耦的基礎上消除系統的穩態誤差、削弱系統參數不確定和干擾對系統的動態影響,本文設計了一種全局積分滑模控制器,使系統在初始階段就處于滑模態,同時通過滑模函數反饋減小了系統參數不確定和干擾造成的滑模誤差,實現了各輸出之間的全程解耦和魯棒穩定。
1 飛行器動力學模型
令系統狀態x=[α,β,γ,ωx,ωy,ωz,φ,ψ]T,控制量u=[δz,δy,δx]T,系統輸出y=[α,β,γ]T,則傾斜轉彎高超聲速飛行器非線性控制模型描述如下:
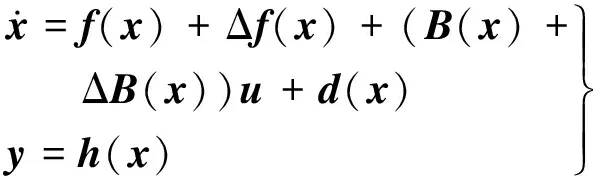
(1)
式中,f(x),B(x)和h(x)分別為x的n維、n×m維和m維解析向量函數;Δf(x)為系統函數中的不確定項;ΔB(x)為系統輸入矩陣中的不確定項;d(x)為未建模動態和外部干擾。
f(x)=
(2)
(3)
h(x)=[h1(x),h2(x),h3(x)]T
=[α,β,γ]T
(4)
2 三通道全局積分滑模解耦控制

采用如下形式的傳統滑模面:
s=[s1,s2,s3]T
(5)
式中,λi>0 (i=1,2,3)。λi使得以下系統
(6)
是漸近穩定的。
采用一定形式的滑模趨近律得到控制作用,當系統在控制作用下到達滑動模態時,有:
(7)
各個誤差方程都只與自身動態相關,因此系統的各輸出之間沒有耦合作用。在實現滑模運動的同時,系統也實現了解耦輸出。
傳統的滑模控制形式簡單、易于設計實現,但是由于初始誤差、系統不確定和干擾會引起滑模誤差,而系統沒處于滑模態時各輸出之間存在耦合,會影響滾動角和迎角的動態響應,同時使得側滑角動態增大,而較大的側滑角會引發大的誘導滾動力矩,進一步加強交叉耦合效應,嚴重影響傾斜轉彎飛行器的控制性能。
由式(7)易知,系統的各輸出之間保持解耦狀態的關鍵是在系統存在不確定和干擾的情況下保持滑模態,本文提出的解決辦法是設計全局積分型的滑模面,增強系統的魯棒性,同時使得系統一開始就處于滑模面上,消除了到達階段,實現各輸出之間的全程解耦。
設計如下形式的滑模面:
σ=[σ1,σ2,σ3]T
(8)
式中,en為自然對數;mi>0;ηi>0;ei(0)(i=1,2,3)為初始誤差。
由于σ(0)=[0 0 0]T,系統從一開始就處于滑模態,假設不確定系統式(1)滿足廣義匹配條件[7],于是有:
(9)
其中:

q(x)=[LdLfh1(x),LdLfh2(x),LdLfh3(x)]T
式中,L為Lie導數算子;p(x),Δp(x),G(x),ΔG(x)的具體表達式見文獻[7]。
由于G(x)是非奇異的,所以可取:

(10)
其中:
K=diag[k1,k2,k3],L=diag[l1,l2,l3]
(ki>0,li>0;i=1,2,3)
sgnσ=[sgnσ1,sgnσ2,sgnσ3]T
將式(10)代入式(9)可得到滑動模態趨近律:

(11)
Δp(x)+ΔG(x)u+q(x)=δ(x)
于是式(11)為:

(12)
式(12)表明廣義不確定性δ(x)的存在會引起滑模誤差,進而嚴重影響各輸出的動態響應,因為δ(x)是時變不確定的,難以準確估計和消除,所以通過滑模函數反饋的形式削弱其影響,取控制律:
Kσ-Lsgnσ)
(13)
其中:

于是有:


(14)
圖1為滑模函數反饋示意圖。
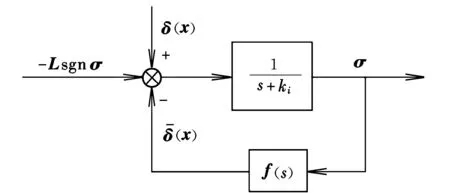
圖1 滑模函數反饋示意圖

=σT[-Kσ+(J+I)-1(δ(x)-Lsgnσ)]
≤-σT[Kσ-(J+I)-1Wsgnσ]

(15)
為了消除高頻顫振現象,通常對變結構控制中的符號函數項sgnσ采用飽和函數來平滑,即取控制信號:
2.2 暴露方式及部位 暴露方式:銳器傷82名、占68.91%,黏膜暴露17名、占14.29%,皮膚暴露15名、占12.60%,其他5名、占4.20%;暴露部位:手指95名、占79.83%,手臂17名、占14.29%,眼7名、占5.88%。
Kσ-Lsat (σ/ρ))
(16)
其中:
sat(σ/ρ)=[sat(σ1/ρ1),sat(σ2/ρ2),sat(σ3/ρ3)]T
式中,sat(σi/ρi)為飽和函數;ρi為邊界層厚度;i=1,2,3。定義:
在自動駕駛儀設計中,俯仰/偏航通道一般按照過載進行設計,因為迎角α、側滑角β不易測量,但是考慮到高超聲速飛行器的動力裝置——超燃沖壓發動機的推力大小與迎角、側滑角直接相關,需要直接實施控制,因此在設計中將迎角和側滑角作為狀態變量和輸出變量。在工程應用中,可利用慣導及其他測量信息估計出迎角、側滑角。根據協調控制要求,可直接令側滑角指令βr=0,迎角指令由文獻[8]的方法產生。
3 仿真與分析
高超聲速飛行器滑模變結構解耦控制系統仿真分析在Matlab/Simulink平臺上展開。仿真參考信號為yr=[αr,βr,γr]T=[6°,0°,30°]T;舵機時間常數為0.01 s,阻尼系數為0.7;速率陀螺時間常數為0.003 2 s,阻尼系數為0.6。系統參數誤差考慮極限情況,進行±30%拉偏,干擾作用根據力矩平衡關系等效為舵偏干擾d。
具體仿真參數為:
λ1=λ2=λ3=30 s-1,m1=m2=m3=15 s-1
η1=η2=η3=10,k1=15 s-1,k2=k3=10 s-1
l1=l2=l3=10 rad/s2,j1=j2=j3=5
w1=w2=w3=0.1 rad/s2,ρ1=ρ2=ρ3=0.2 rad/s
δz=δy=δx∈[-20°,20°]
仿真根據干擾分別為常值、時變和短時強干擾三種狀態展開,即:
狀態1:
d=[-5°,-5°,-5°]T
狀態2:
d=[-5° sin(πt),-5° sin(πt),-5° sin(πt)]T
狀態3:
d=[dz,dy,dx]T
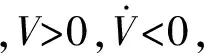
式中,dz為周期1 s、幅值10°的方波;dy為周期2 s、幅值10°、延遲1 s的方波;dx為周期4 s、幅值10°、延遲2 s的方波。偏航和滾動方向的干擾引入延遲是為了考查干擾的耦合影響。仿真結果見圖2~圖4。
從圖2~圖4可知,在滑模控制器作用下,系統參數不確定對α,β,γ的響應影響不大,但是傳統滑模控制器抑制干擾的能力差。狀態1傳統滑模控制器作用下,α,β,γ的穩態誤差分別為0.15°,0.3°和3.2°,β和γ超調比較大,其中γ最大超調達到了12.3°,β最大超調達到了4°,而全局積分滑模控制沒有產生超調和穩態誤差;狀態2傳統滑模控制器作用下,γ振蕩幅值達到了3°,β也有最大1.8°的誤差,全局積分滑模控制只有γ產生了不大于0.2°的誤差;狀態3傳統滑模控制器作用下,干擾在三個通道之間存在耦合,偏航和滾動通道尤其明顯,α,β,γ的最大誤差分別達到0.5°,0.75°和6.5°,全局積分滑模控制作用下,α,β,γ的最大誤差分別為0.1°,0.05°和0.3°。仿真說明在干擾嚴重時,傳統滑模控制器產生了較大的控制誤差,不滿足解耦控制要求,而全局積分滑模控制器對參數不確定和干擾都有很好的魯棒性,保證了跟蹤效果。
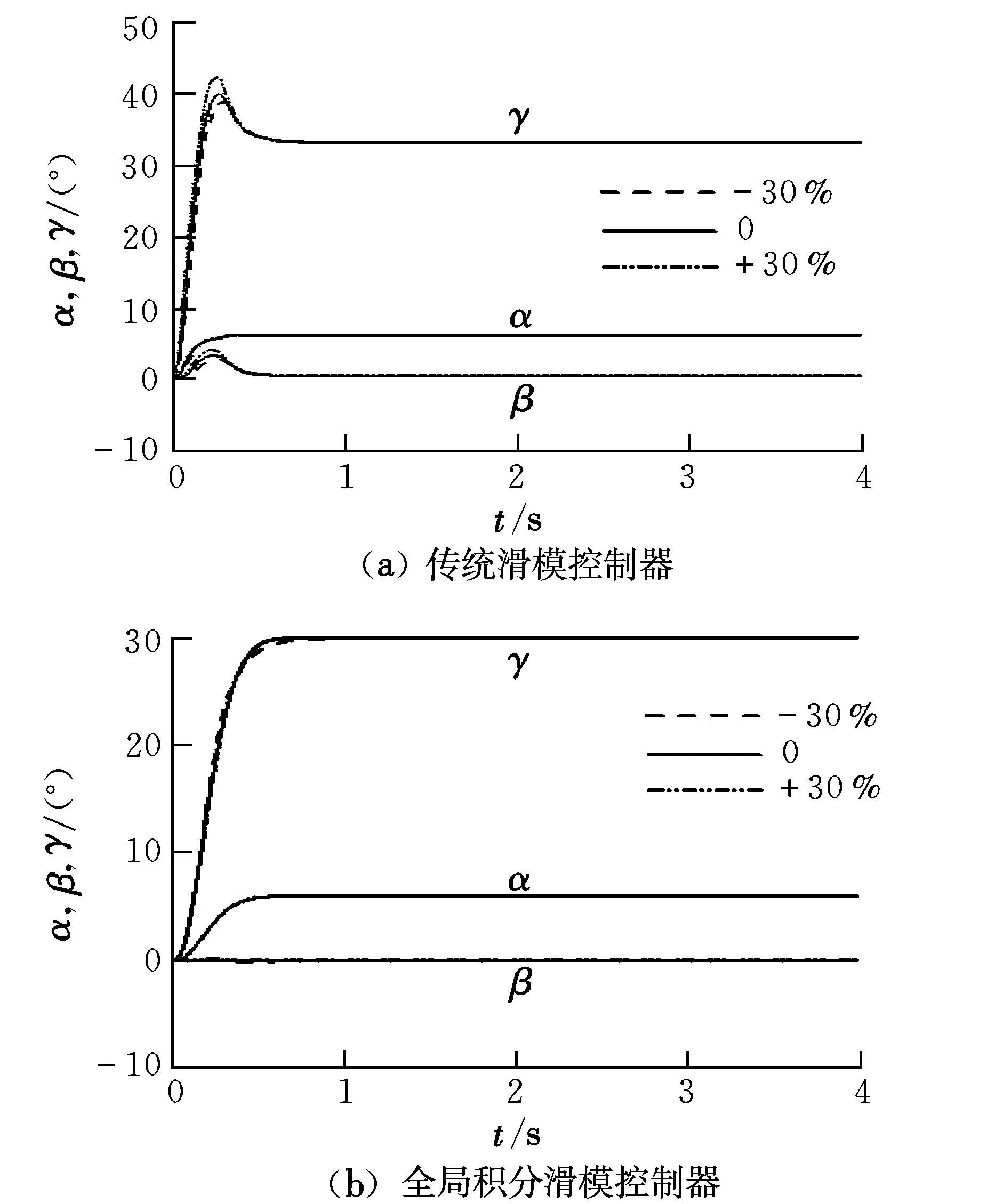
圖2 狀態1響應曲線
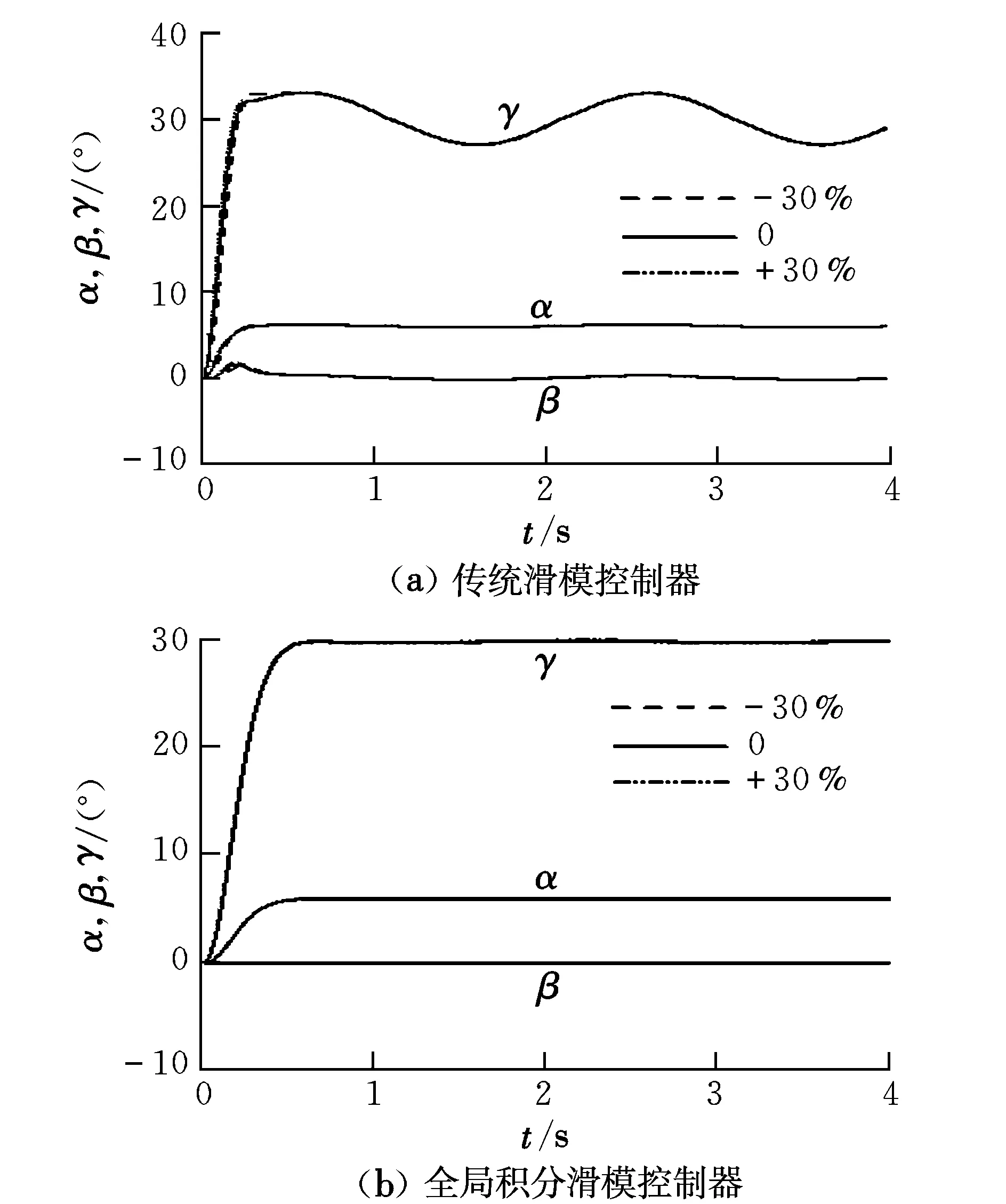
圖3 狀態2響應曲線
圖4 狀態3響應曲線
4 結束語
本文設計了一種基于全局積分滑模面的變結構解耦控制器,解決了傳統滑模控制抑制干擾能力差、到達階段存在耦合的問題,同時通過滑模函數反饋削弱參數攝動及干擾產生的滑模誤差,實現了各輸出之間的全程解耦和魯棒穩定。仿真結果證實了本文所提方法具有良好的跟蹤性能和魯棒性,滾動角和迎角能精確控制,側滑角保持在±0.5°以內,表明該自動駕駛儀能滿足高超聲速飛行器傾斜轉彎協調控制的要求。
[1] Lee S Y,Lee J I,Ha I J.Nonlinear autopilot for high maneuverability of bank-to-turn missiles[J].IEEE Transactions on Aerospace and Electronic Systems,2001,37(4):1236-1253.
[2] Fu L C,Chang W D,Yang J H,et al.Adaptive robust bank-to-turn missile autopilot design using neural networks[J].Journal of Guidance,Control,and Dynamics,1997,20(2):346-354.
[3] Williams D E,Friedland B.Modern control theory for design of autopilots for bank-to-turn missiles[J].Journal of Guidance,Control,and Dynamics,1987,10(4):378-386.
[4] Chern T L,Wu Y C.Design of integral variable structure controller and application to electrohydraulic velocity servosystems[J].IEE Proceedings-D,1991,138(5):439-444.
[5] 張科,周鳳歧.不確定性多變量系統的全程滑態變結構控制方案設計[J].控制理論與應用,1999,16(2):221-224.
[6] 李鵬,馬建軍,李文強,等.一類不確定非線性系統的改進積分型滑模控制[J].控制與決策,2009,24(10):1463-1466,1472.
[7] 李裕山,姚郁.再入飛行器的大機動軌跡實現[J].哈爾濱工業大學學報,1997,29(5):89-92.
[8] 張友安,楊旭,崔平遠,等.BTT導彈的神經網絡自適應反饋線性化控制[J].航空學報,2000,21(1):84-86.
Decouplingcontrollerdesignforbank-to-turnhypersonicvehiclebasedonslidingmodevariablestructure
XIONG Ke, XIA Zhi-xun, GUO Zhen-yun
(College of Aerospace and Material Engineering, NUDT, Changsha 410073, China)
An adaptive global integral sliding mode control approach is proposed to face the uncertainties and the serious cross coupling among the channels of hypersonic vehicle. This method is based on the invariant principle of sliding mode for uncertainties and disturbance, a global integral sliding is introduced, which makes the initial state of the system to locate at the sliding mode. The sliding mode error caused by disturbance and parameter perturbation is weakened with feedback, which decouples the output of the system and makes the system robust. Numerical simulation proves the efficiency and the robustness of the proposed algorithm, which satisfies the demand of the bank-to-turn hypersonic vehicle.
bank-to-turn; hypersonic; decoupling design; global integral sliding mode
2011-04-02;
2011-09-07
熊柯(1981-),男,湖南桃江人,博士研究生,研究方向為飛行器魯棒自適應控制。
TJ765.2
A
1002-0853(2012)01-0061-05
(編輯:姚妙慧)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00