無刷直流電動機不導通相電流分析
2012-10-31 06:53:20王璞,解恩,翟猛
微特電機 2012年4期
關鍵詞:分析
王 璞,解 恩,翟 猛
(西北工業大學,陜西西安 710072)
0 引 言
永磁無刷直流電動機在實際生產中應用越來越廣泛。一般認為,電機在120°導通方式下工作,而往往忽略在換相時不導通相電流的存在。
本文根據無刷直流電動機的工作原理以及數學模型,分析了電機在不同的調制方式下,換相過程中所出現的不導通相電流的變化情況。一些文獻分析了不同的PWM調制方式下,不導通相電流產生的時間和特點[1-3]。本文通過全面研究多種常用PWM調制方式對無刷直流電動機換相過程中所出現的不導通相電流的影響,探求其產生的原因以及對電機性能的影響,并通過實驗對其驗證。
無刷直流電動機工作常用的PWM調制方式如圖1 所示,包括[4-6]:(a)HPWM - LON:上橋 PWM控制,下橋常通;(b)HON-LPWM:上橋常通,下橋PWM控制;(c)ON-PWM:各管前60°常通,后60°受PWM控制;(d)PWM-ON:各管前60°受PWM控制,后60°常通;(e)HPWM -LPWM:上、下橋都受PWM控制。
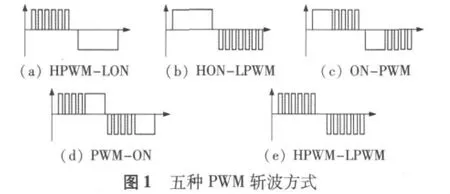
圖中,在這五種PWM斬波方式里,通常把圖1(a)~圖1(d)定義為單斬方式,圖1(e)定義為雙斬方式。
1 不導通相電流分析
1.1 無刷直流電動機的分析模型
無刷直流電動機三相對稱,定子繞組為三相星型接法,且每相繞組可等效為電阻、電感和反電動勢串聯而成,采用三相逆變器作為驅動電源。圖2為主電路和電機等效模型。
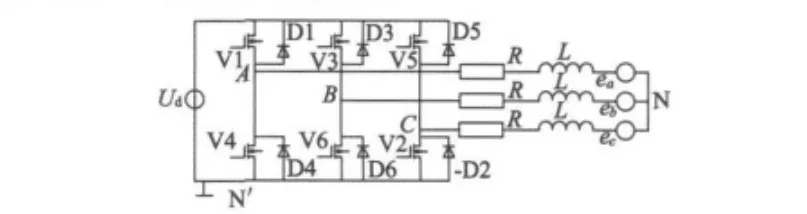
圖2 全橋逆變器和電機等效模型
三相繞組端電壓方程:
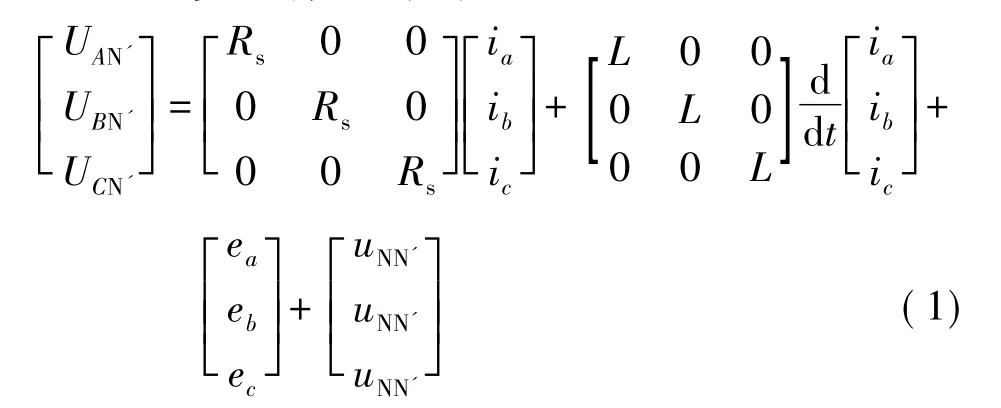
式中:UAN'、UBN'、UCN'為電機各繞組端電壓(相對于負電源端N');R為每相電阻;L為每相繞組的漏感;ia、ib、ic為三相電流,ea、eb、ec為相反電勢;uNN'為電機中性點對負電源端N'電壓。
以A相為例,無刷直流電動機的理想反電勢波形如圖3所示。電流的變化規律在選用不同的PWM調制方式時也有所變化。本文通過具體分析五種PWM調制方式,對比不導通相電流的變化情況。
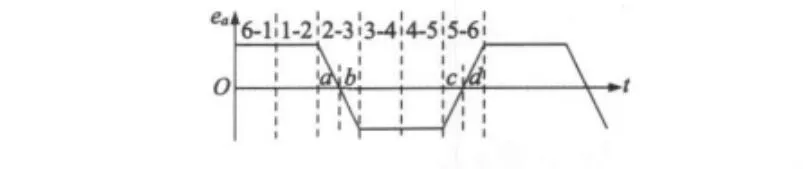
圖3 A相理想反電勢波形圖
1.2 HPWM-LON調制方式的分析
系統采用三相全橋主電路。A相反電勢波形如圖3所示,將每個反電勢周期分為6個區段,對應驅動電路的6個開關管狀態。A相不導通狀態分為區段2-3以及區段5-6兩個部分,每個區段中又有UA>0和UA<0兩種情況,在圖3 中表示為a、b、c和d。
(1)區段2-3
在區段2-3內,A相處于不導通狀態。上管V3受到調制,下管V2恒通。
由于上橋臂受 PWM控制,下橋臂常通,在PWM周期中對應會出現兩個狀態:V3工作狀態和V3截止狀態,如圖4和圖5所示。其中,當V3截止時,由于反并聯續流二極管D6續流,形成如圖5所示的狀態電流回路。
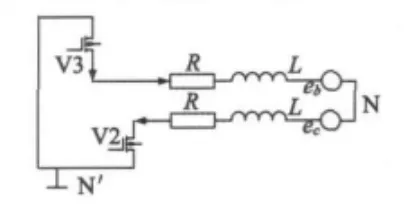
圖4 V3工作時的回路
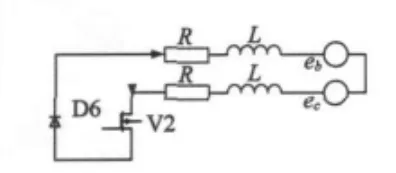
圖5 V3截止時的回路
通過以上分析,可得B、C端電壓方程:

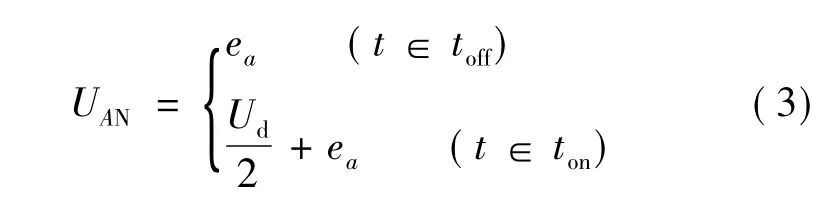
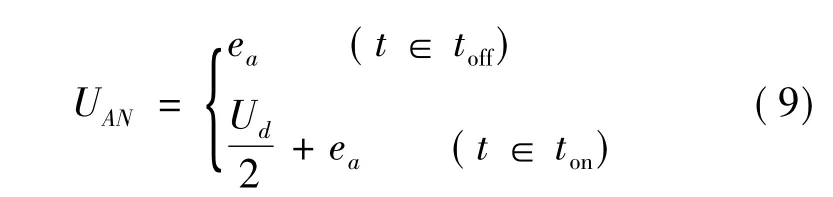
整理上式,當V3導通時中性電壓uN=,且V3關斷時UN=0。從而得到關斷相A的端電壓表達式:
由驅動電路可知,當UAN<0時,續流二極管D4正向偏置,不導通相A就會有電流產生。所以該電流產生與否,只需考慮UAN是否小于零。區段2-3內的b部分,ea<0,D4偏置導通,形成由電源負極-D4-A相-C相-V2構成的回路,如圖6所示,與換相所需電流方向相反。
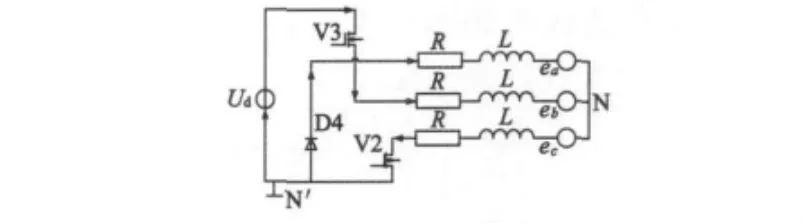
圖6 HPWM-LON調制方式不導通相電流回路
當V3導通時,取決于UAN是否大于零。若大于零,則不會有不導通相電流回路產生。
綜上所述,在5-6區段的d區域內,ea>0,不出現電流;在2-3區段的a區域內,ea>0,不出現電流;在2-3區段的b區域和5-6區段的c區域內,ea<0,反并聯續流二極管D4導通,從而出現和PWM調制同頻的脈動不導通相電流,出現的區域如圖7所示。不導通相電流的幅值顯然隨著反電勢ea變化而變化。

圖7 HPWM-LON調制A相不導通電流存在的區域
1.3 HON-LPWM調制方式的分析
若不導通相A續流結束后,B相的下橋臂V2截止時,經二極管D5續流,則A相的端電壓方程:
在此調制方式下,只需考慮UA是否大于Ud,即V2截止時,ea是否大于零。在5-6區段的c區域內,ea<0,不出現不導通電流;而在d區域內,ea>0,A相上橋臂的續流二極管D1正向偏置,產生與圖7相反的不導通電流。同理,在2-3區段的b區域內,ea<0,不存在不導通相電流,而在2-3區段的a區域內,ea>0,出現和PWM調制同頻的不導通相電流;存在區域如圖8所示。
1.4 PWM-ON控制方式的分析
當下橋臂換相時,不導通相(A相)電流的變化情況如HON-LPWM中所述的分析,電壓方程:

在上橋換相時,不導通相(A相)電流的變化情況同以上1.2中的分析,電壓方程:
電流存在的區域如圖9所示。

圖9 PWM-ON調制A相不導通電流存在的區域
1.5 ON-PWM調制方式的分析
ON-PWM調制方式下,當下橋臂換相時,不導通相(A相)電流變化情況同本文HPWM-LON中所分析,電壓方程:
當上橋換相時間段內時,變化同1.3中分析,不導通A相有電壓方程:
電流存在區域如圖10所示。
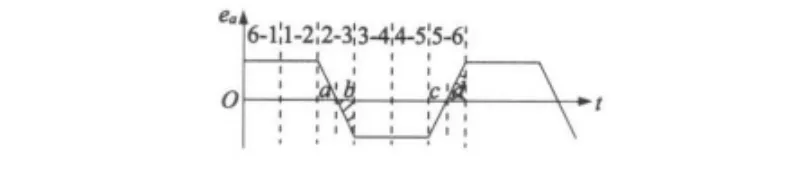
圖10 ON-PWM調制A相不導通電流存在的區域
1.6 HPWM-LPWM調制方式的分析
在2-3區段內,對V2、V3同時進行PWM斬波調制,則中性點處的電壓UN=,由于上、下橋臂的電路結構是對稱的,則在整個區間內截止相不會續流。并且,當A相處于下橋換相時間段內時,由電壓方程:
得出ea>0,相對應的續流管不會偏置導通,故沒有電流產生。
同理,當A相處于上橋換相時間段內時,變化同1.3中分析,電壓方程:

得出ea>0,也沒有電流產生。
2 實驗驗證
2.1 HPWM-LON實驗測試
如圖11所示,電機在HPWM-LON控制方式下,空載不導通相電流的波形變化。
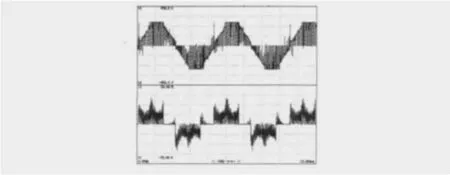
圖11 HPWM-LON控制方式下空載電流波形
可以看出,實驗結果與1.2中的原理分析以及圖7相對應。
2.2 HON-LPWM實驗測試
如圖12所示,電機在HON-LPWM控制方式下,空載不導通相電流的變化情況。
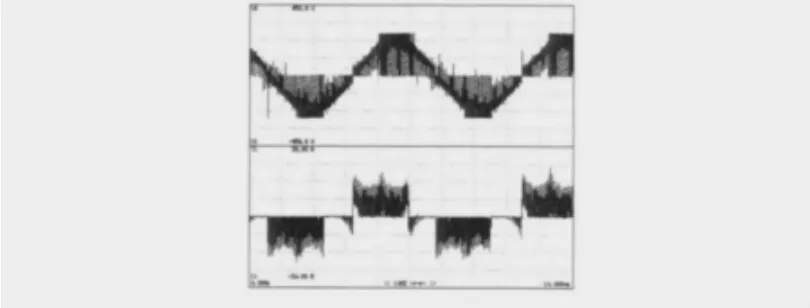
圖12 HON-LPWM控制方式下空載電流波形
可以看出,實驗結果與1.3中的原理分析以及圖8相對應。
2.3 PWM-ON實驗測試
圖13顯示了電機在PWM-ON控制方式下,空載不導通相電流的波形變化。
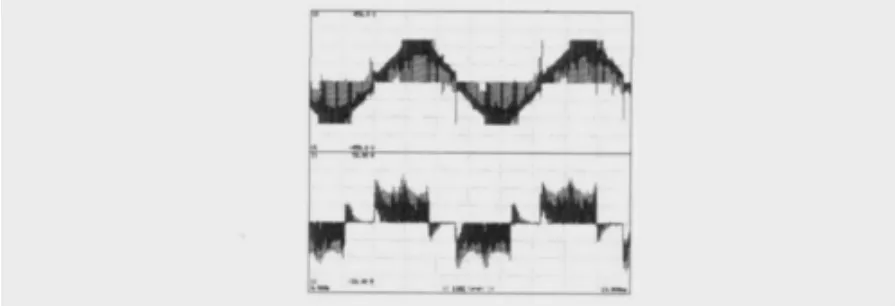
圖13 PWM-ON控制方式下空載電流波形
可以看出,實驗結果與1.4中的原理分析以及圖9相對應。
2.4 ON-PWM實驗測試
圖14顯示了電機在ON-PWM控制方式下,空載不導通相電流的變化情況。
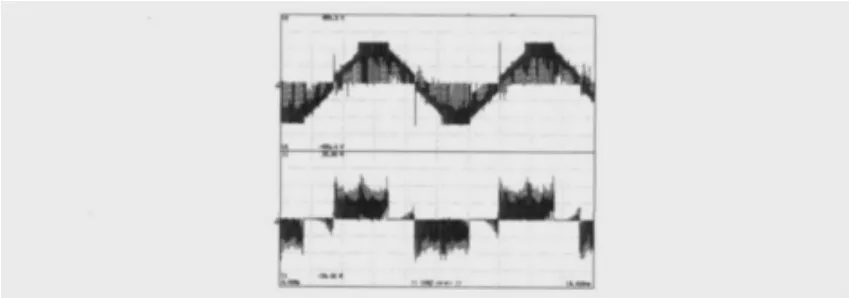
圖14 ON-PWM控制方式下空載電流波形
可以看出,實驗結果與1.5中的原理分析以及圖10相對應。
2.5 HPWM-LPWM實驗測試
圖15顯示了電機在HPWM-LPWM控制方式下,空載不導通相電流的變化情況。
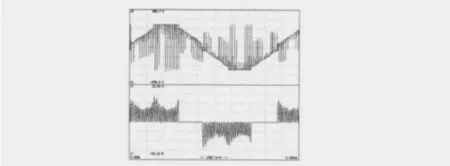
圖15 HPWM-LPWM控制方式下空載電流波形
可以看出,實驗結果與1.6中的原理分析相對應。
3 結 語
不論采用哪種PWM控制方式,無刷直流電動機在換相過程中,不導通相大都出現與PWM同頻的脈動電流。而所采用的PWM調制方式的不同,不導通相電流出現的時間和幅值也不相同。通過本文所分析的電流波形變化,可以得出以下兩點:
(1)不導通相電流存在于續流期間;
(2)不同PWM調制方式下,不導通電流的波形不盡相同;
(3)不導通相電流存在受電機反電勢的影響,與電機負載狀態無關。
[1]Lai Yen -Shin,Lin Yong-Kai.Assessment of pulse-width modulation techniques for brushless DC motor drives[J].41st Industry Applications Conference Annual Meeting,2006:1629 -1636.
[2]李金飛,秦海鴻,陳志輝,等.無刷直流電動機非導通相電流拖尾的研究[J].電力電子技術,2009,43(1):25 -27.
[3]韋鯤,胡長生,張仲超.一種新的消除無刷直流電機非導通相續流的PWM調制方式[J].中國電機工程學報,2005,25(7):106-110.
[4]張相軍,陳伯時.無刷直流電機控制系統中PWM調制方式對換相轉矩脈動的影響[J].電機與控制學報,2003,7(2):4 -8.
[5]賀安超,劉衛國,郭志大.無刷直流電動機斬波方式與電磁轉矩脈動關系[J].微特電機,2010,38(5):17 -20.
[6]楊燕,焦振宏,王崇武,等.PWM調制方式對無刷直流電動機反電勢電流的影響[J].微電機,2006,39(3):25 -27,79.
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
