基于ARM與FPGA的運動控制平臺研究
2012-10-16 06:23:10陳永忠俞路陽
核技術 2012年3期
晏 宇 陳永忠 俞路陽
(中國科學院上海應用物理研究所 上海 201800)
束流截面是表征束流性能的重要參數,束流截面測量系統可獲得束流截面的形狀和大小、束流發射度、能散度以及能量等參數,對加速器調試、運行和研究必不可少。上海深紫外自由電子激光(SDUV-FEL)[1]的束流截面測量系統[2]包括圖像采集、氣動控制和步進電機控制三大子系統,均由分立模塊組成,其中步進電機控制子系統選用美國Galil公司的DMC-21x3運動控制卡[3],配合驅動器細分控制,定位精度達1 mm。
隨著SDUV-FEL控制步進電機數量的增加,原有電動控制系統的安全保護需額外定制的軟件系統實現,對束流測量系統的安全性和精確性有較大影響,亟需對現有設備提出改進方案。上海光源采用的束流位置測量(Beam Position Monitor, BPM)系統參考斯洛文尼亞Instrumentation Technology公司的Libera EBPM處理器[4],采用RF信號直接采樣處理的工作模式,利用帶通欠采樣技術對RF信號進行量化后,在FPGA(Field- Programmable Gate Array)中完成數字下變頻、濾波、抽取等處理而得到束流位置,典型的采樣率為百MHz。這類處理器能同時進行閉軌、逐圈位置、快軌道反饋用束流位置的精確測量,數據服務器內置其中。參考該 BPM 系統的成功案例,本文提出基于 ARM(Advanced RISC Machines)與FPGA的運動控制平臺方案。
選用ARM與FPGA作為運動控制的嵌入式通用平臺,用于束流截面測量系統的電動位置和氣動位置控制。ARM用于接入EPICS系統、電機速度控制及位置控制;FPGA完成步進電機的閉環控制,用于接收并處理步進電機的脈沖控制信號,同時處理光柵尺提供的反饋信號。本文對嵌入式束流截面測量系統的總體結構,硬件接口設計和軟件設計進行了分析。
1 嵌入式系統總體設計
電機控制模塊是運動控制平臺的核心功能模塊,主要性能指標包括:外接八路步進電機,每路步進電機通過限位信號和光柵尺反饋信號實現電機閉環控制,提供多個I/O擴展接口,以便接入圖像采集系統和氣動控制系統。束流截面測量系統采用ARM與FPGA芯片作為主控芯片,硬件系統包括ARM模塊、FPGA模塊、步進電機接口板模塊。系統總體設計方案如圖1所示。
在同行評審結束之后,相關美國國立衛生研究院中心還將對擬資助課題進行一系列評估,包括與美國國立衛生研究院資助原則的一致性、課題經費預算評估、申請人課題組織管理系統評估、申請人能力評估、與公共政策及需求的一致性評估等。
2.3.9 腎小球濾過率 2項研究[6,16]報道了腎小球濾過率,各研究間有統計學異質性(P=0.001,I2=90.4%),采用隨機效應模型進行分析,詳見圖10。Meta分析結果顯示,兩組患者腎小球濾過率比較,差異無統計學意義[WMD=3.97,95%CI(-6.87,14.81),P=0.47]。
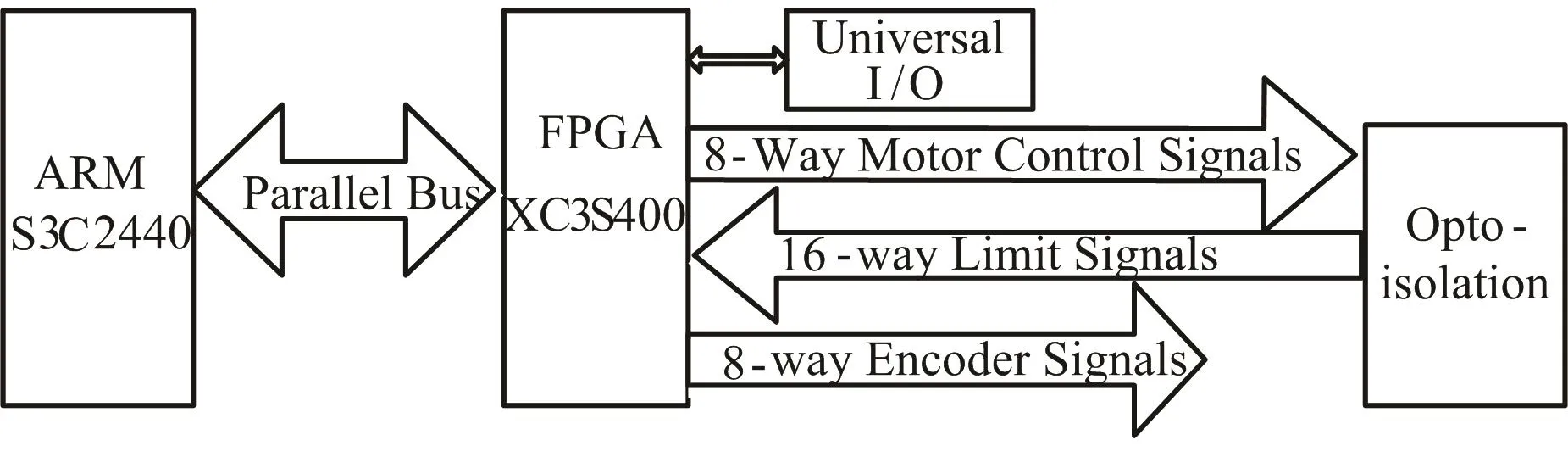
圖1 系統總體設計原理框圖Fig.1 Block diagram of overall system design.
采用基于 ARM 和 FPGA的控制平臺,移植Linux操作系統到ARM中,通過IOC編程即可接入現有EPICS環境。ARM作為主控芯片,發送脈沖控制信號;利用FPGA的I/O端口多、功耗低、主頻高的優點,充分實現電機控制器的功能。ARM和FPGA平臺的優點在于:便于對系統控制策略進行修改;根據實際需求對控制信號參數進行設置,使系統具有良好的可靠性、可維護性及可擴展性;降低了硬件采購的成本。控制平臺可在步進電機控制器基礎上,利用空余的FPGA的I/O端口進行功能擴展,滿足后續的擴展功能,系統保護通過FPGA硬件實現,不需使用額外的軟件。這樣充分利用了ARM的網絡傳輸功能和FPGA的并行數據處理功能,提高了電機控制系統的可靠性和擴展性。
2 系統硬件方案
2.1 ARM和FPGA選型
秦錫麟,1942年出生于江西南昌,1964年畢業于景德鎮陶瓷學院美術系,原任景德鎮陶瓷學院黨委書記、院長,現任景德鎮陶瓷學院名譽院長、教授、中國工藝美術大師。中國工藝美術大師評審委員會評委、中國陶瓷藝術評審委員會主任委員、中國陶瓷協會副理事長、中國工藝美術學會副理事長、中國美術家協會陶瓷專業委員會委員。
(2) 輸出控制信號接口設計。輸出信號為步進電機的兩路脈沖控制信號,每路都有使能、脈沖和方向信號,8路共24個輸出信號。FPGA輸出信號經電平轉換和光電隔離后輸到步進電機驅動器。
運動控制平臺系統軟件設計包括FPGA控制模塊、Linux系統的驅動開發、控制界面編程和EPICS的移植。FPGA編程采用模塊化設計,單獨控制各路步進電機,以完善系統的控制功能,便于提高電機的控制精度和步進電機控制器的靈敏度,增強系統的可靠性;ARM部件編程在嵌入式Linux操作系統環境下實現。
S3C2440的CPU主頻400 MHz,最高533 MHz;Flash容量64 MB,可供移植嵌入式Linux操作系統。
FIFO存儲器內部有讀寫指針,使用數據寄存器訪問,當ARM讀取一個數據后,FIFO讀指針會指向下一個數據,再次讀取時讀取下一個數據,寫入端操作同理。
XC3S400-4PQ208芯片的系統門數400 k,等效邏輯單元8064,分布式RAM容量56 kb,塊RAM容量288 kb,專用乘法器5個,數字時鐘管理單元4個,最大用戶IO數141個。
2.2 步進電機接口板設計
FPGA到ARM的接口包括上行異步FIFO和下行異步FIFO,判斷兩個異步FIFO的狀態。上行異步和下行異步 FIFO分別用來緩存來自或發送給ARM的數據。
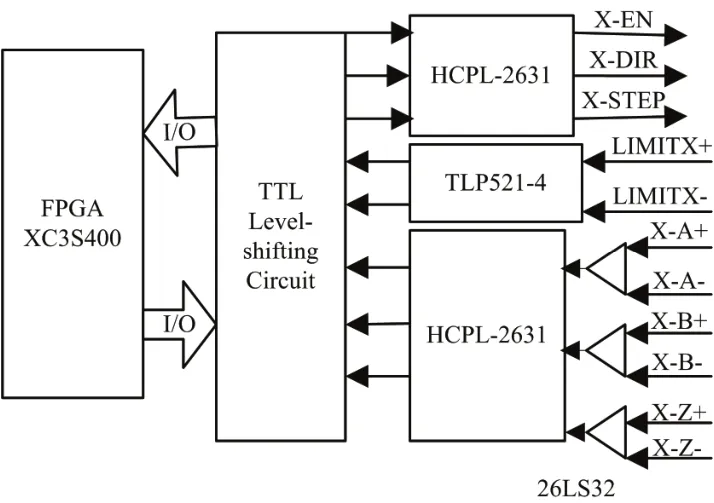
圖2 X路步進電機接口電路Fig.2 X-axis of stepper motor interface circuit.
圖3 步進電機接口板實物圖Fig.3 PCB of stepper motor interface board.
(1) 輸入限位信號接口設計。輸入限位信號包括限位信號 LIMITX+、LIMITX-~LIMITE+、LIMITE-,檢測到限位信號后,限位信號觸發,立即停止相應電機的運動;限位消除,電機才能在該方向上繼續運動。
FPGA模塊的主要功能是利用XC3S400的I/O端口設計電機控制信號的輸入輸出、光柵尺信號的輸入以及外圍的擴展輸入輸出。還可通過JTAG接口編程對I/O進行重配置,增加了系統的靈活性。
(3) 光柵尺信號接口設計。光柵尺信號提供三對差分信號A+、A–、B+、B–、Z+、Z–作為反饋,三對信號需經差分電路轉換為單路信號A、B、Z。差分電路由 26LS32構成,將輸入的一對極性相反的光柵尺反饋信號轉換為單極性的方波信號。其中A、B兩路信號為正交脈沖信號,Z路信號每轉產生一個低電平脈沖,用于回零時的定位控制。
經比較選用:①水功能區水質達標率;②城市污水處理率;③水土流失治理率。通過這3項指標反映區域對水質、水生態保護和修復方面所取得的成效。
2.3 ARM與FPGA通信接口設計
FPGA內部邏輯功能主要完成控制信號的轉發,與S3C2440的接口連接如圖4所示。FPGA中的狀態/命令寄存器用于對 FPGA內部交換表進行控制操作;設置兩個FIFO分別用作FPGA與ARM間數據傳輸的輸入與輸出緩沖;一個用作 FIFO數據寄存器,用于讀取 FIFO存儲器的數據,一個用作控制寄存器。S3C2440提供了 16位寬數據總線DATA[0:15]和8位寬地址總線ADDR[0:7],并采用4組控制信號進行控制數據傳輸:nGCS2為片選使能控制信號,即選擇BANK2,nOE為使能信號;nWE為寫數據信號,nRD為讀信號,nINT0為FPGA對ARM的中斷信號。該控制信號須由GPIO控制寄存器單獨設定。由于S3C2440的總線時鐘頻率為100 MHZ,總線操作周期很短,FPGA可通過控制ARM9的nWAIT引腳延長ARM總線操作周期[5]。
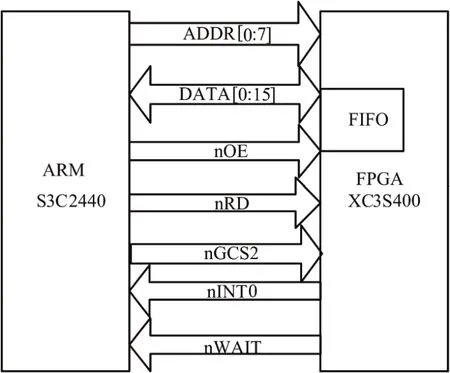
圖4 S3C2440與XC3S400的接口連接Fig.4 Interface connection between S3C2440 and XC3S400.
步進電機接口板中X路控制電路見圖2,其余7路與X路類同;接口板印刷電路板實物見圖3。
束流截面測量系統硬件實物如圖5,步進電機接口板位于正中,接口板上方小板是FPGA實驗板,接口板左邊是ARM實驗板,機箱兩側是電源,機箱下部是步進電機驅動器;FPGA與步進電機接口板通過總線插槽連接,FPGA與ARM間的數據通信接口通過外接總線連接。圖中接口板各器件焊接及接口連接全部手工實現,檢測并保證了開發板中各功能模塊的信號完整性。
幾個月下來,媼婦譜的萬千種變局,師徒四人閉門苦研,都已經爛熟于心,這飛來的棋局,果然是玄之又玄,打開了圍棋的眾妙之門,有時候他們連夜打譜,聽著夜雨打著窗外的新荷,不知東方之既白,這種夢幻般的體會,也是從前沒有過的,星雨常想,比較起畫畫、彈琴、書法,也許圍棋才是我的真愛?這樣一閃念,林師父、蘇師父、顏師父的影像便在她眼前一一浮現,按下葫蘆浮起瓢,讓她自己都覺得內疚起來。

圖5 束流截面測量系統硬件實物圖Fig.5 Photo of the prototype beam profile diagnostic system.
3 系統軟件設計
推薦理由:1.十三五重點圖書,國家出版基金資助項目 2.主編系中科院院士,參與編寫的人員均為國內該領域成果比較突出的學者,圖書原創性高,內容權威,包括很多發表在Science,Nature等國際一流期刊上的研究成果。3.代表了我國近年來在電催化納米材料科學和技術研究中的最新進展。
基體元素信號值遠遠高于其空白值,且基體元素信號值的穩定性也是影響測定結果穩定性的主要因素,故實驗選擇63Cu的信號強度為考核對象。在表1中其他條件參數不變的情況下,采用純銅光譜標準樣品T02逐級優化了激光剝蝕系統的激光能量、剝蝕孔徑、掃描速率以及載氣流速4個影響激光剝蝕固體進樣產生瞬時信號的關鍵參數,使63Cu的信號強度穩定并達到最大值[11]。
3.1 FPGA控制模塊
FPGA控制模塊軟件設計控制邏輯如圖6所示。FPGA編程需實現FIFO邏輯控制、時鐘發生器、步進電機控制和光柵尺反饋信號處理。
本方案中ARM芯片采用韓國Samsung公司的ARM9系列處理器S3C2440,FPGA芯片采用美國Xilinx公司的Spartan 3系列的XC3S400-4PQ208。
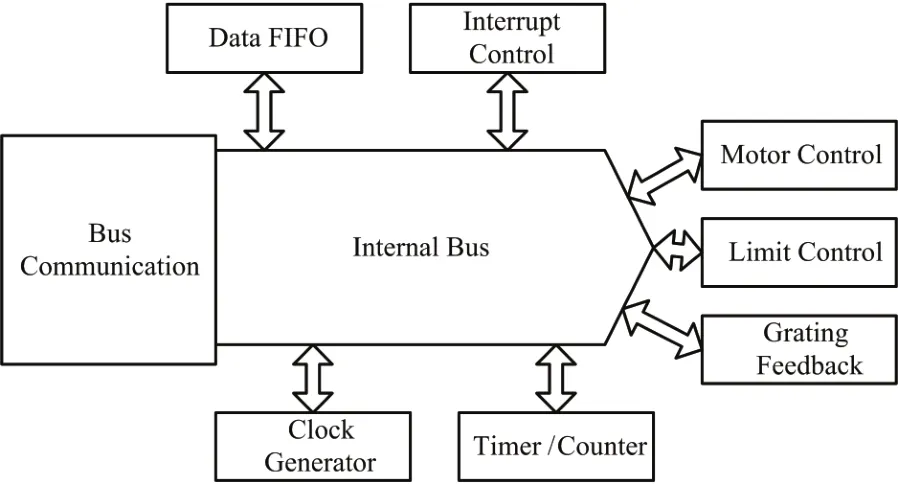
圖6 FPGA模塊控制邏輯Fig.6 Control logic of the FPGA module.
“微型探究”策略引導:提升學生的數學抽象能力是課堂探究教學的中心環節,因此在課堂中教師要設計富有思考性的“微型探究”活動,引導學生經歷一個從“形”到“數”的認識過程,也就是要經歷從幾何直觀到理性認識的過程,使學生在探索、體驗和感悟中促成思考方法的不斷優化,提升數學抽象能力,催生學習的智慧.
時鐘發生器產生FIFO讀寫時鐘信號,FIFO通過寫時鐘信號將數據讀入,FIFO數據半滿時(存入4096個bit)產生半滿中斷信號,通知ARM讀取數據。
步進電機閉環控制通過接收ARM發送的脈沖控制信號,使用Verilog HDL編程實現步進電機的邏輯控制功能。光柵尺反饋信號將反饋的數據信號存入FIFO中,待ARM進行讀取。FPGA模塊中FIFO功能測試使用邏輯分析儀及ModelSim仿真觀察程序波形,可實時獲取和調試信號邏輯。
3.2 Linux系統移植和驅動開發
嵌入式Linux系統采用2.6.24的內核版本,系統移植主要使用U-boot實現,文件系統的燒寫和程序配置參照 ARM 開發板的在線文檔實現。FPGA設備驅動開發采用通用的編程方案,使FPGA驅動程序不限于固定的FPGA芯片。FPGA設備在Linux系統中屬字符設備,Linux將所有字符設備都作為文件進行操作,對FPGA設備完成初始化后,系統編程需實現的操作函數接口封裝在 file_operations結構體中,接口封裝主要函數包括對文件的基本操作如 read()、close()、read()、write()等,根據 FPGA與ARM的連接邏輯對模塊函數進行定制,通過改寫ioctl()函數功能,實現對FPGA設備的控制。FPGA設備驅動程序整體調用過程如圖7。
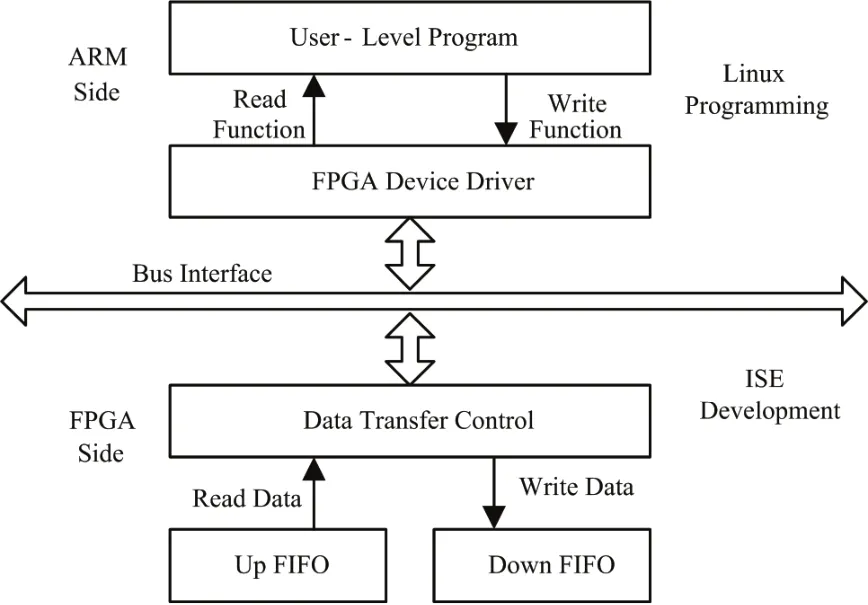
圖7 FPGA設備驅動數據流圖Fig.7 Dataflow of FPGA device driver.
FPGA驅動程序的主要功能是:對FPGA設備進行初始化和釋放操作;把控制信息從內核傳到FPGA以及從FPGA讀取數據;讀取用戶區間應用程序的數據,傳給FPGA設備文件;回送應用程序請求的數據、檢測和處理FPGA使用時出現的中斷請求和數據處理。Linux通用中斷程序的流程是在應用程序向Linux申請了中斷通道后,系統會響應外部中斷IRQ_EINT0,進入中斷處理程序。中斷處理接受各中斷接收的信息反饋給設備,并根據服務的中斷類型進行數據處理。FPGA設備驅動需準確快速實現數據的讀寫操作和阻塞操作,實現 ARM和FPGA的全雙工數據通信。驅動程序編寫后,需在FPGA端對上行和下行FIFO環回。
4 實驗結果
FPGA設備的編程通過Verilog HDL語言完成,波形仿真結果通過Modelsim分析,RTL電路圖由Synplify生成,圖8為FIFO模塊的波形仿真圖。ARM 端嵌入式平臺下測試用的圖形界面用 Qtopia編程實現,圖9為ARM與FPGA通信控制界面圖。
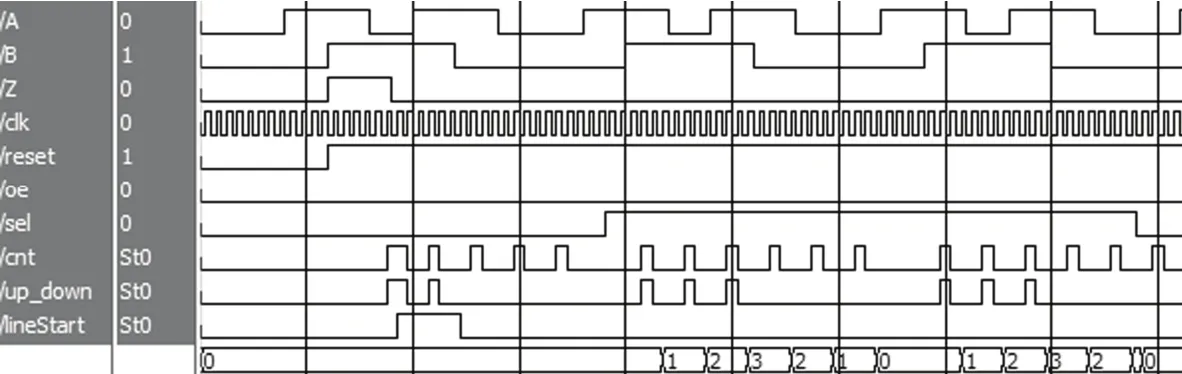
圖8 FPGA光柵尺信號仿真波形圖Fig.8 Simulation wave of FPGA’s encoder signals.
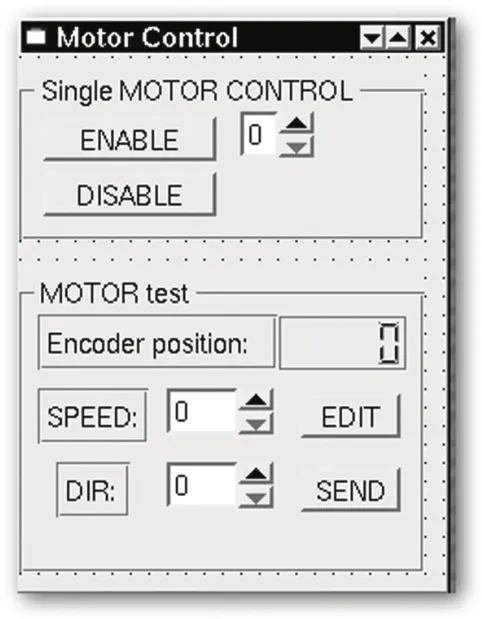
圖9 ARM與FPGA通信控制界面Fig.9 ARM embedded system control GUI.
實驗室環境下硬件測試系統的編碼器回饋頻率最高可達12 MHz,步進輸出頻率最高達3 MHz (脈沖及方向),可實現光柵尺回饋、原點復歸、正負極限控制、支持1–8軸電機控制,單軸控制下配合驅動細分控制器的定位精度為 2 μm,與 DMC-21x3運動控制卡的定位精度相差1 μm。
5 結語
搭建了ARM和FPGA運動控制平臺后,控制系統的擴展性得到提高,實現了預想中的要求。后續的開發工作包括在Linux中完善步進電機控制的GUI開發及EPICS環境的移植,進一步改進FPGA的控制邏輯,提高步進電機控制安全性和定位精度。
ARM和FPGA架構的束流截面測量系統進展順利,對單個步進電機控制可達到2 μm的定位精度,有效實現了單個步進電機的閉環控制。考慮到FEL隧道中同時操作多個電機的需求,后期開發需進一步完善系統功能,在進行現場在線測試后,爭取替代現有隧道中的電機控制系統,從而提高FEL裝置數據采集可靠性和擴展性,并改善束流測量的效率和準確率。
1 ZHAO Zhentang. Design study for the sduv-fel facility[R].Proceedings of APAC, Gyeongju, Korea, 2004: 161–163
2 Takano S, Masaki M. OTR based monitor of injection beam for top-up operation of the spring-8[R]. Proceedings of the DIPAC, 2005: 72–74
3 Galil Motion Control Inc. DMC-21x2/21x3 Manual[Z].Rocklin, California, US, 2008
4 Instrumentation Technologies Company. Libera electron specification 1.91[Z]. 2007
5 劉 源, 朱善安. 基于ARM9和CPLD的嵌入式工業控制系統[J]. 機電工程, 2007, 24(1): 39–49 LIU Yuan, ZHU Shanan. The embedded industry controlling system based on ARM9 and CPLD[J]. Mech Electr Eng Mag, 2007, 24(1): 39–49
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
